анализа сочетаний поступающих заявок, что снижает достоверность одновременного решения различных задач судовождения, навигации и эксптгуатации и, следовательно, в цепом, снижает безопасность плавания.
Целью изобретения является расширение функциональных возможностей устройCTJBa за счет Повьшения достоверности одновременного решения различных задач судовождения, задач навигации и эксплуатации в реальном масштабе времени на одной ЭВМ и повышения эффективности работы судоводителя. Эта цель достигнута благодаря тому, что в известное устьpofsCTBo введены блок задания режимов диалога, блок контроля диалога и блок управления приоритетом, входы которого подключены соответственно к выходам вавигадионного пульта, блока обнаружения целей, индикатора ситуаций, второму выходу блока ведения судового журнала, к первым выходам блока задания режимов диалога и блока контроля диалога, а выход - к управляющему входу блока диспетчера, вторые выходы блока задания режимов диалога и блока контроля диало га соединены с блоком сопряжения, а управляющие входы с выходом первого телетайпа.
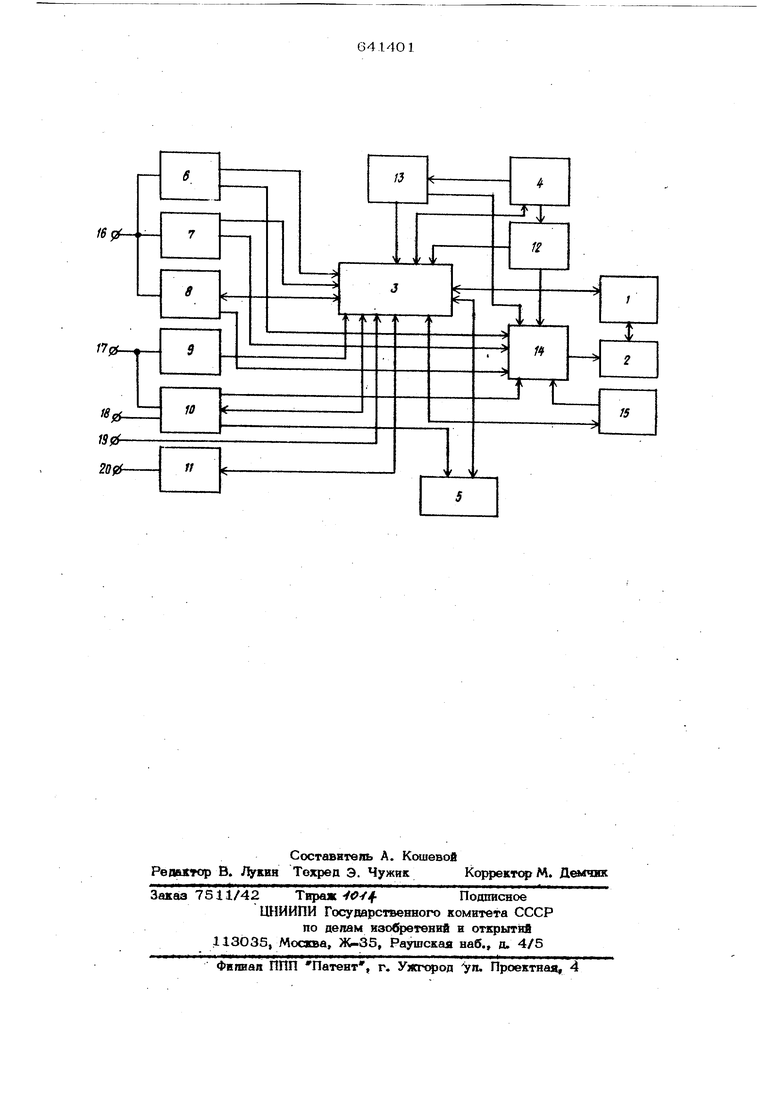
Блок- жема устройства представлена ва чертеже и содержит ЭВМ I, блок диспетчера 2, блок сопряжения 3, первый и второй телетайпы 4 и 5, блок кодарования видеосигналов 6, блок обн ужедия целей 7, индикатор ситуаций 8, многоканальный,преобразователь напряжение ™ код 9, блок ведения судового журнала 10, блок управления авторулевым 11, блок задания режимов диалога 12, блок контроля диалога 13 блок управления приоритетом 14, навитаци- онный пульт 15, выходные шины 16 к редиолокациовной станнии (РЛС), выход ные шины 17 к навигационным датчикам, выходные шины 18 к датчикам судовых текнических средств, выходные швны 19. к приёмникам редиовавигадионвых систем выходные шины 20 к авторулевому.
Устройство работает следующим 56разом. С навигационного пульта 15 или индикатора ситуаций 8 задается соответ ствуюший режим работы. Информация от датчиков информации поступает через со- отВетствукяние преобразователи и блок сопряжения 3 в ЭВМ 1. Для обесвече ния ояновременной работы режимов устройства ( определения параметров
движения своего судна и встречных судов; местоопределения своего судка по данным аатчиков РНС, РЛС или по счислению места; определения степени опасности сопровождаемых судов и выбора маневра на безопасное расхождение; фор-мирования управляющих сигналов на авто рулевой; автоматического ведения судового журнала; решения различных эпизоди ческих навигационных задач и проведения экономико-эксплутационных расчетов) в реальном масштабе времени используется блок диспетчера 2, управляющий вход которого подключен к выходу блока управления приоритетом 14 При этом в зависимости от вида сочетаний заявок, поступаемых от абонегггов (например, от блока обнаружения целей 7, блока кодирования видеобйгналов 6, от схемы ручного ввода на сопровождение индикатора ситуаций 8 блока задания режимов диалога 12), их важности и предыдущего состояния блока диспетчера 2, блок управления приоритетом 14 вырабатывает тот или иной управл5осщий сигнал в блок диспетчера 2, по которому ЭВМ 1 выходит на соответствующую подхфограмму. После обслуживания заявки ЭВМ 1 вы полняет действия в установленном цикле блока .диспетчера 2 до прихода следующего соотве-тствующего управляющего сигнала (заявки) с блока управления приоритетом.
Таким образом устройство осуществляет непрерывную автоматическую обрабо-рку текущей информации с наглядным отображением результатов на индикаторе си туаций 8, телетайпах 4 S, табло навигационного пульта Г5. Блок ведения судового журнала 10 обеспечивает формирование соответствующей заявки на автоматическую регистрацию по установленной форме определенного набора параметров, действий судоводителя и по команде ЭВМ 1 формирует управляющие сигналы для опроса датчиков в преобразует информадшо в вид необходимый для вывода яа телетайп. 5. ,
Для защиты устройства от грубых субъективных ощибок при вводе данных предусмотрен обмен судоводителя с ЭВМ 1 в Виде диалога, для чего служит блок задания режимов диалога 12 (например, режим диалога при решении задачи поправки компаса или задачи определения места судна по звездам). При этом -на первом телетайпе 4 набирается соответствующий код задачи, который анализируется в блоке задания .режимов диалога, и по результатам анализа выбирается с помощью блока управления приоритетом .14 соответствующая подпрограмма ЭВМ 1, по которой ЭВМ запрашивает данные по соответствующим параметрам и проиавошгт анализ на достоверность. В спучае, если допущена ошибка при вводе с первого телетайпа 4, что часто бьтает при большом объеме информации, с помощью блока контроля диалога 13 иь(еется возможность проведения коррекции соответствующей информации. Это позволяет устранить повторное решение задачи при неправильном вводе. В этом режиме по соответствую щей команде с бпока контроля диалога 13 блок управления приоритетом 14 вйрабатьгоает управляющий сигнал на блок диспетчера 2 доя выбора соответствующей программы ЭВМ 1, и в ЭВМ 1 в режиме диалога с судоводителем вносятся соответствующие корректировки. Блок управления авторулевым 11 по командам, выдаваемым с. ЭВМ 1 через блок conpsiжения 3, формирует управлгоощий сигнал на авторулевой.
Предлагаемое информационно-вычислительное устройство позволяет повысить безопасность плавания за счет увеличения достоверности одновременного решения различных задач судовождения, навигации и эксп туатации в реальном масштабе времени на одной ЭВМ и повысить эффективность работы судоводителя. При таком блочном составе устройства и наличии диалогового режима имеется возможность наращивания объема решаемых задач путем ввода новых программ. Автоматический ввод текущей информации для режима задач предупреждения стрпк жжений и непрерьшная коррекция освобождает судоводителя от оперативного управления. Автоматическая регнстрапия данных судового журнала облегчает работу судоводителя и позволяет оценивать его действия в сложной обстановке. Режим диалога позволяет более полно использовать вычислительные ресурсы и создать оптимальные режимы работы судоводителя.
Ф
рмула изобретения
Информационно-вычислительное устройство для системы управления навигацией и судовождением, содержащее блок сопряжения, соединенный с электронно- ы
числительной машиной, шшикаторомситуаиий, навигационным пультом, блоком ведения судового журнала, блоком кодирования видеосигналов, блоком обнаружения целей, многоканальным преофазоватепем
напряжение - код, блоком управления авторулевым, первым телетайпом, вторым тетдатайпом, подсоединенным к первоксу выходу блока ведения судового журнаяа, и блок диспетчера, соединенный с элекгронно-вычислительной машиной, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит блок задания режимов диалога, блок контроля диалога
и блок управления приоритетом, входы которого подключены соответственно. к выходам навигационного пульта, блока обнаружения нелей, индикатора ситуаций, второму выходу блока ведения судового журнала, к первым выходам блока задания режимов диалога и бпока контроля диалога, а выход - к управляющему входу блока диспетчера, вторые выходы блока режимов диалога и бпока контроля
диалога соединены с блоком сопряжения, а управляющие входы - с выходом первого телетайпа.
Источники информации, принятые во внимание при экспертизе:
1. Техническое описание комплексной автоматизации судовождевия теплохода Михаил Лермонтов, ЦНИИМФ, Л., 1974.
2. Техническое описание системы
Тонак -Mitsutbtii Топас System (Functions ),M.it ubi5lii tiectvv -industHes, LTI3.Notgasoi1 i diipvar-d. wor-ksj Td,
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления навигацией и судовождением судна | 1976 |
|
SU691038A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2001 |
|
RU2207585C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗАВАРИЙНОГО ДВИЖЕНИЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО СУДНА ПРИ НАЛИЧИИ ПОДВОДНЫХ ИЛИ НАДВОДНЫХ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513198C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2011 |
|
RU2463205C2 |