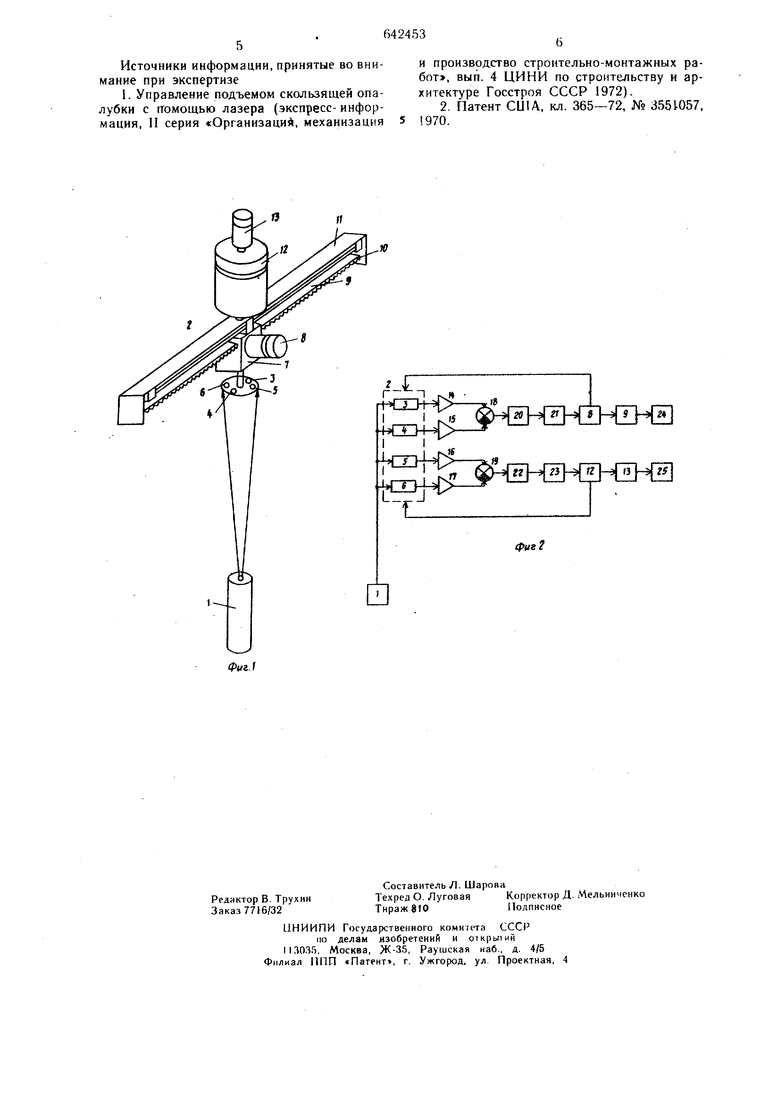
ворота, регистрирующие п-риборы, фотоизмерительный блок и лазерный задатчик, причем лазерный задатчик оптически связан с фотоизмерительным блоком, две пары фотодиодов которого через соответствующие усилители подключены к соответствующим блокам рассогласования, выход одного из блоков рассогласования через последовательно соединенное первое реле, первый блок управления, двигатель радиального перемещения и датчик перемещения подключен к одному регистрирующему прибору, а выход другого блока рассогласования через последовательно соединенное второе реле, второй блок укравления, двигатель поворота и датчик гюворота подключен к другому регистрируюьцему прибору, дополнительно €набм ено раiViOH, на которой укреплена зубчатая рейка Li каретка, с установленными на ней фотоизмерительным блоком и двигателем радиального перемещения, причем каретка кинематически связана с зубчатой рейкой и датчиком перемеихения, а рама - с двигателем м датчиком поворота. На фиг. 1 показана кине.матическая схема устройства; на фнг. 2 - структурна ; схема устройства. Устройство состоит из лазерного задат-;i:Ea 1 и фотоизмерительного блока 2, оп.ткческн связанных между собой. Лазерный задатчнк устанавливается на фундаменте Еогводимого сооружения, а фотоизмеритель;1Ь Й, блок на опалубке. Фотонзмерительный бло 2 выполнен 1;в фотодиодах 3-6. Фотонзмерктельный блок укреплен иа каретке 7, на которой установлен двигатель 8 радиального перемещения. Каретка связана с индуктивным датчиком перемещения 9 и с зубчатой рейкой 10 с помощью шестерня. Рейка 10 и датчик укреплены на раме И, центркоторой связан с валом двигателя поворота 12. Другой конец соединен с,датчиком поворота (поворотный трансформатор) 13. Фотодиоды 3-6 через усилители i4-i попарно соединены с блоками рассогласования 18 и 19. Выход блока рассогласований 8 через реле 20 и блок управления 2S соединен с двигателями радиального пере ещення 8, а выход блока рассогласования 18 через реле 22 и блок управления 23 соединен с двигателем поворота 12. Датчик 9 и 13 связаны-с регистрирующими приборами 24 и 25. Описанное устройство работает следующим образом. Луч лазерного задатчнка i, задающий вертикальную ось возводимого сооружения, принимается фотодиодами 3-6 ютоизмерительного блока 2. Если центр опалубки совпадает с осью луча, то все фотодиоды равномерно освещены и на выходе блоков рассогласования 18 и 9 сигналы равны нулю. При смещении опалубки одиш или два фотодиода оказываются оевещенными лазерным лучом. В результате на выходе блока рассогласования 18 или 19 или одновременно на выходе обоих появляются сигналы, которые приводят к срабатыванию реле 20, 22. Последние через блоки управления 21, 23 включают двигатель радиального перемещения 9 или двигатель поворота 12 или оба одновременно. Двигатель радиального перемещения 8 передвигает каретку 7 с фотоизмерительным блоком 2 вдоль рейки 10 до тех пор, пока фотодиоды 3 и- 4 ке будут равномерно освещены. Двигатель поворота 12 обеспечивает поворот фотоизмерительного блока относительно центра опа/ убкн, который совпадает с центром рамы }|. Поворот осуществляется до тех пор, пока не будут равномерно освещены фотодиоды 5 и 6. Радиальные перемещения фотоизмерительного блока 2 вдоль зубчатой рейки 10 измеряются относительно центра опалубки продуктивным датчиком 9, подвижная катушка которого механически связана с кареткой 7, угол поворота фотоизмерительlioro блока измеряется датчиком поворота i3. Таким образом сигналы на выходе датчиков 9 и 13 соответствуют амплитуде и направлению смещения опалубки от проектной оси задаваслюй лучом лазерного зенит-цеитрира. Формула изобретения Устройство для автоматического контроля положения опалубок, содержащее усилители,, блоки рассогласования, реле, блоки управления, двигатель радиального перемещения, двигатель поворота, датчики перемеш.ения и поворота, регистрируюп ие приборы, фотоизмерительный блок и лазерный задатчик, причем лазерный задатчик оптически связан с фотоизмерительным блоком, две пары фотодиодов которого через соответствующие усилители подключены к соответствующим блокам рассогласования, вы.чод одного из блоков рассогласования через последовательно соединенное первое реле, первый блок управления, двигатель радиального перемещения и датчик перемещения подключен к одному регистрирующему прибору, а выход другого блока рассогласования через последовательно соединенное второе реле, второй блок управления, двигатель поворота и датчик поворота подключен к другому регистрирующему прибору, отличающееся тем, что, с целью повышения надежHocTt работы устройства, оно снабжено рамой, на которой укреплена зубчатая рейка и каретка с установленными на ней фотоизмерительным блоком и двигателем радиального перемещения, причем каретка кинематически связана с зубчатой рейкой и датчиком перемещения, а рама - с двигателем и датчиком поворота.
Источники информации, принятые во внимание при экспертизе
I. Управление подъемом скользящей опалубки с гтомощью лазера (экспресс- информация, II серия «Организаций, механизация
и производство строительно-монтажных работ, вып. 4 ЦИНИ по строительству и архитектуре Госстроя СССР 1972).
2. Патент CUIA, кл. 365-72, № 355Ю57, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля прямолинейности и устройство для его осуществления | 1989 |
|
SU1739195A1 |
| Устройство для заливки расплава в формы | 1988 |
|
SU1533832A1 |
| Устройство для изготовления покрышек пневматических шин | 1974 |
|
SU540559A3 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| Поплавковый уровнемер | 1990 |
|
SU1783312A1 |
| Стенд для динамических испытаний изделий | 1990 |
|
SU1781579A1 |
| Устройство для регулирования непрерывного сталеплавильного процесса | 1972 |
|
SU473163A1 |
| Система управления заглублением шпалоподбивочного блока | 1986 |
|
SU1323626A1 |
| Устройство контроля расхода воздуха для вентиляции тяговых электродвигателей транспортного средства | 1984 |
|
SU1194721A1 |
| РЕГУЛЯТОР ПРЯДЕНИЯ | 1973 |
|
SU370290A1 |
