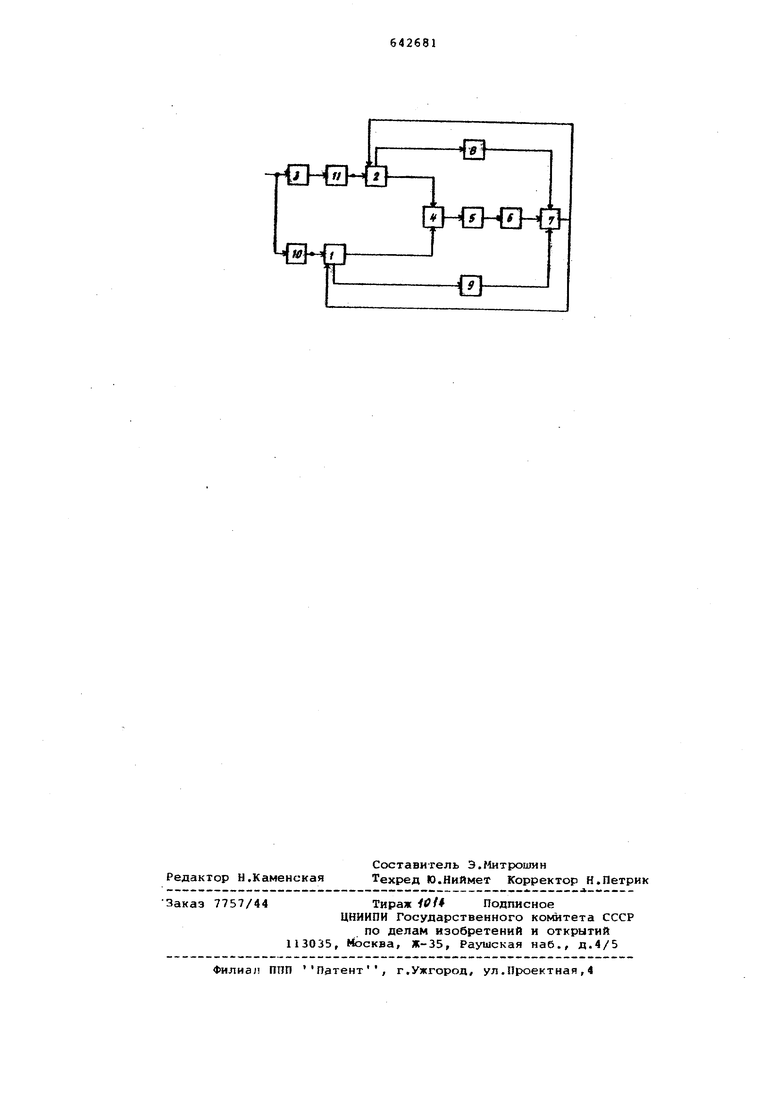
рого, в свою очередь, подключен ко входу блока временной задержки 6. Выход блока 6 подключен к одному из входов блока формирования сигналов настройки 7. Сигнальные по функциям чувствительности выходы настраиваеки моделей 1 и 2 подсоединены через фильтры низких частот 8 и 9 к сигнальным входам блока формирования сигналов настройки 7. Настраиваемые модели 1,2 представ ляют собой линейные фильтры, описываемые операторами, гфичем под параметрическим входом имеется в ет1ду схема управления параметрами, жестко Соединенная с каждым паргилетром модели, состоящая из интегратора с бес конечной памятью и управляемого сопр тивления на выходе интегратора. Число выходов по функциям чувствительности постоянно для каждой модели и равно числу настраиваемых параметров т.е. ( h+1) и К для параллельной 1 и последовательной 2 моделей соответственно. Измерительный блок 10 представляет собой измерительное устройство входного сигнала объекта. Измерительный блок 11 представляет собой измерительное устройство выход ного сигнала объекта. Выход блока формирования сигналов настройки 7 связан с параметрическими входами моделей 1 и 2. На вход объекта 3 поступает сигна X, который измеряется с помехой N2 и поступает в виде сигнала XI X+N2 на вход первой и настраиваемой модел 1. Сигнал с выхода объекта 3 измеряется с помехой N1 и в виде сигнала У1«У+М1 поступает на вход второй и настраиваемой модели 2. Сигнал УЗ с выхода первой настраи ваемой модели вычитают в блоке формирования сигнала ошибки настройки 4 из сигнала У2 с выхода второй настраиваемой модели 2. Разность сигналов У2 и УЗ подают на фильтр низких частот 5, фильтрующий низкочастотные части помех N1 и М2, вызванные медленным дрейфом и постоянным сме{вением, возникающим при измерении и преобразовании сигналов. Отфильтрованную разность 1 с выход фильтра низких частот 5 подают на бл временной задержки 6. Из условия фил ра1дии высокочастотной части помех N1 и N2 время задержки принимается равным или большим интервала корраля дни высокочастотной части помех N1 и Ы2.4Для фильтрации помех/ связанных с погрешностями измерения или записи сигнала в виде дасскргетной последовательности, задержка /Лнравна одному шагу дискретизации по времени Отфильтрованная и задержанная по вре мени в блоке временной згшержки 6 ра ность 2 перемножается в блоке формирования сигналов настройки 7 с сигна лами, пропорциональными функциям увствительности разности сигналов f 1 о настраиваемым параметрам: Ц ервой 1 и tjj - второй 2 настраиваемых оделей. Блок формирования сигналов астройки 7 усредняет полученные роизведения по времени и изменяет арагчетрыС -, bj пропорционально уседненным промзведеииямв соответстенно для каждой модели до получения значений усредненных произведений еньше заданной величины. При таком пособе получения оценок паргшетров средненные произведения, пропорционально которым изменяются параметры моделей. Не будут содержать смещения, вызываемые помехами Ml и N2, если задержка д1 разности f не меньше времени корреляции составляющих, пропорциональных помехам N1 и 2 сомножителей 2 иДИ-/ ( iil,2... .. ,J,2.., n). Тогда малость Этих произведений будет соответствовать оптимальным значениям оценок параметров . Эффективность устройства наиболее проявляется при низких частотах входного сигнала. Данное устройство для определения параметров линейных динамических объектов на основе измеряемых с помехами и медленным дрейфом или постоянным смещением сигналов и выхода системы обеспечивает повышение точности оценок параметров систеьш по наблюдаемым сигналам входа и выхода ее. Формула изобретения Устройство для определения параметров линейных динамических объект тов, содержащее первую и вторую настраяваемае модели, первые выходы которых подключены ко входам блока формирования сигнала сшибки настройки, а вторые выходы через {шльтры низких частот - соответственно к первому и второму входам блока формирования сигналов настройки, вькод которого соединенс входами настраиваемых моделей , отличающееся тем, что, с целью првьвиения точности устройства, оно .содержит последовательно соединенные дополнительный фильтр низких частот и 5лок временной задержки, выход которого подключен к третьему входу блока формирования сигигшов настройки, а вход дополнительного фильтра низких частот соединен ; выходом блока формирования сигнала ошибки настройки. Источники информации, принятые во вни 4aниe при экспертизе: 1.Авторское свидетельство СССР 361456, кл. «05 В 17/03, 1969. 2,Авторское свидетельство СССР 473992, кл. Q05 В 29/02, 1572. 3.V a5tenM.K.4(totnac1i В.РAdaptive ЛАо eetingof time variqtJte s iemft/oniofmation and cpnirot 49б9ДГв15
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU429415A1 |
| Устройство для идентификации линейных динамических объектов | 1977 |
|
SU693342A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2002 |
|
RU2231819C2 |
| Способ контроля точности измерений массовой концентрации выбросов загрязняющих веществ в режиме реального времени для автоматизированной измерительной системы промышленного предприятия | 2024 |
|
RU2837989C1 |
| АДАПТИВНАЯ СХЕМА ДЛЯ УПРАВЛЕНИЯ СХЕМОЙ ПРЕОБРАЗОВАНИЯ | 2007 |
|
RU2427953C2 |
| Прогнозирующий регулятор | 1986 |
|
SU1386958A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ДВИЖУЩИХСЯ ОБЪЕКТОВ ДОПЛЕРОВСКОЙ СТАНЦИЕЙ | 2022 |
|
RU2792196C1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ1^ГНЛ"ФОВД | 1972 |
|
SU429642A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |