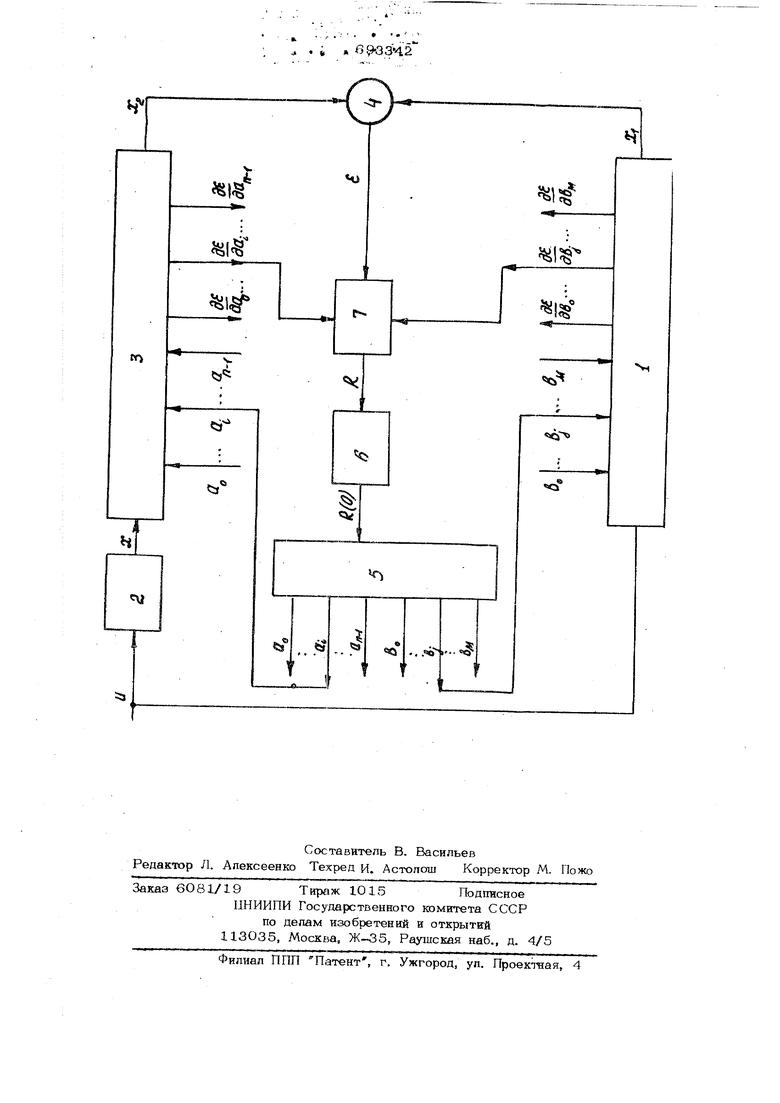
(54) УСТРОЙСТВО ДЛЯ ЩЕНТИФИКАЦИИ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ стйчески независимыми от входного .сигн и ( t ) то сигнал ошибки ( -t ) h сигналы на выходах моделей содержат составляющие, зависящие от помехи. Пр этом преобразованные соответствующими операторами одни и те же помехи присутствуют в обоих сигналах блока перемножения, и поэтому значения параметрЮв моделей не будут соответствовать значениям соответствующих параметров объекта. Кроме того, если при передаче и преобразовании сигналов произошел кратковременный отказ (сбой) эквивалентный по своему действиюкратковременной помехе большого уровня, то на входе интегратора появляется импульс значительной амплитуды, пропорциональ ный Квадрату амплитуды помехи, привоЯЯП1ИЙ к появлению ложного сигнала, увеличивающего; разброс значений параметров модели. Увеличение же инерционности фильтров, входящих в модели, и сглаживающего фильтра ухудшает устойчивость к скорость настройки параметров модели, так как фильтры моделе сужают спектр выходных сигналов моделей, что приводит к увеличению взаим связи контуров настройки, а сглаживаю щий фильтр увеличгшает инерционность контура. Цель изобретения - увеличение точности устройства. Поставленная цель достигается тем, что устройство содержит последователь но соединенные корреляторы и фильтрыпредикаторы, выходы которых соединены с соответствующими входами блока интеграторов, первые входы корреляторов подключены к выходу блока фор14ирования ошибки настройки, остальные - к соответствующим сигнальным по функциям чувствительности выходам модулей. На чертеже представлена блок-схема устройства. Она содержит модель 1, подключенную параллельно объекту 2, модель 3, подключенную последовательно, блок 4 формирования сигнала ошибки сигналов Х ( t ) и X2{t ) выходов моделей 1 и 3, блок интеграторов 5, фильтрпредикатор б и коррелятор 7, образующие по каждому из контуров настройки цепочку носледова:тельно соединенных .коррелятора, фильтра-предикатора и инт гратора, выход интегратора соединен с соответствующим параметрическим Еходом одной из моделей, а входы коррелятора - с соответствующим сигнальным по функциям чувствительности выходом соответствующей модели. При несоответствии параметров b.j(jrO,m) ис(11О,п-1)первой и второй мо.делей параметрами 1э и а объекта образующийся на выходе блока формирования ошибки настройки 4 сигнал ощибки ( t ) поступает в коррелятор 7, где для ряда фиксированных задержек по времени -t вычисляются усредненные на заданном интервале и сглаженные инерционным фильтром произведения ),Р арЪигналов ( -tp) и с(1гналов -| , -| . Уточненное значение R (о) усреднённого произведения t Ш-.iJ±l определяете с помоо а шью фильтра-предикатора 6, сглаживающего тю ряду дискретных больших нуля значений tp сигналы )некоторой аналитической зависимостью р (-hp) , и вычисления Т(0)- (о). Например, для значенийfcpTl Ctp) представляется линейной зависимостью p pV-oC гдеоС- р.(о)определяется из условия минимума среднего квадрата ошибки е (ip) RiCtp)-piC-tp) по формуле l.tyi tp-tp ii-(i. гле Чертой обозначено суммирование по М точкам tp. Так как сдвиги фиксированы, то ,..., з можно вычислить заранее, тогда фильтр-пр едикатор упрощается КЛо)-сХ-д -КаС : -K2Vtp -. Уточненный сигнал Т1 (о) поступав т на 1 -и интегратор с оператором - , где коэффициент пропорциональности, а сигнал выхода интегратора пропорционально своему значению изменяет 1 -и параметр модели. Если первый сдвиг tp-t больше времени корреляции помех сдвига, при KohropoM усредненное произведение помех близко к нулю, то Т (О) не зависит от помех и, при достаточной точности аппроксимации Р (tp) получаемых с коррелятора, сигналов Т (ip)B результате настройки, получаем на первой и второй моделях не смешенные оценки всех параметров объекта . - а, b.j Ь (-1. о,п-) г5; При возникновении кратковремеино ч) сбоя по некоторому сигналу, он в корреляторе умножается на сдвинутые по времени сигналы, не имеющие этого сбоя, что существенно уменьщает его влияние на погрешность вычисления Kj (о),, а следовательно, и на разброс параметров, моделей относительно параметров объекта. Использование новых элементов (коррелятора и фильтра-предикатора) выгодно отличает описанную систему идентификации линейных динамических объектов от известных, так как уменьшается смещение и разброс оценок параметров объекта по зашумленным входным и въгходным сигналам, В результате снижаются затраты, связанные с временем проведения эксперимента на объек те, повышается качество управления объектом с использованием информации, получаемой с подстраиваемой модели, снижаются требования к точности, и, как следствие, снижается стоимость измерительной аппаратуры. 6 26 Формул а. изобретения УстрЪйство для идентификации линейых динамических объектов, содержашее две модели, входы которых связаньг с соответствующими входами устройства, а вькоды - с соответствующими входами блока формирования ошибки настройки, и блок интеграторов, выходъ которого связанъг с соответствующими настроечпымк входами моделей, о т л и ч а ющ е е с я тем. Что, с целью, увеличения точности устройства, оно содержит последовательно соединеннъю корреляторы и фильтры-предикаторы, въгходЫ которых соединены с соответствующими входами блока интеграторов, первые входь: корреляторов подключены к въосоду блока формирования ошибки настройки, остальные к соответствующим сигнальным по функциям .чувствительности въгходам моделей. ИСТОЧНИ15И информации, принятъхе во внимание при экспертизе 1, Авторское свидетельство СССР № 473992, кл. GO5 В 23/02, 23.04.73, 2- Masten M.K.,Woniack B-F. Adaptive /Aodetin o Time Votriafete S stems, and Con trot,(,, I969,p 209-215.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство наблюдения | 1982 |
|
SU1101790A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| Устройство для автоматической защиты тепловыделяющей поверхности от пережога при наступлении кризиса теплообмена | 1985 |
|
SU1273681A1 |
| Устройство для определения параметров линейных динамических объектов | 1977 |
|
SU684515A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 1970 |
|
SU265863A1 |
| Устройство для регулирования уровняжидКОСТи B ЕМКОСТи | 1979 |
|
SU830332A2 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| Устройство для определения параметров линейных динамических объектов | 1977 |
|
SU642681A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |