1
Изобретение относится кманнпуля- торостроению и может быть использовано при создании систем управления манипуляторами с пасЪивным отражением нагрузки.
Извест1«я следящие системы с отражением усилия. Система, содержащая датчики положения задающего и исполнительного органов, сумматор, усилите- .ли, исполнительный , датчик момента исполнительного органа и моментный загружатель, не обеспечивает с высокой точностыо ограничения момента исполнительного органа .
Наиболее близким техническим решением к изобретению является система содержащая последовательно соединенные датчик положения задающего органа и первый сумматор, второй вход которого подключен к выходу датчика положения исполнительного органа, связанного с исполнительным элементом, датчиком момента исполнительного органа и да1 чиком скорости, выход которого через
последовательно соединенные второй сумматор и первый усилитель подключен к входу исполнительног.о элемента, и последовательно соединенные второй усилитель, первый нелинейный элемент и моментный загружатель, связанный через второй нелинейный элемент с датчиком положения задающего органа Эта система может с высокой точносчию ограничивать момент исполнительного элемента только при малых значениях скорости, а при повышенной скорости имеет большую моментную ошибку.
Целью изобретения является повышение точности системы.
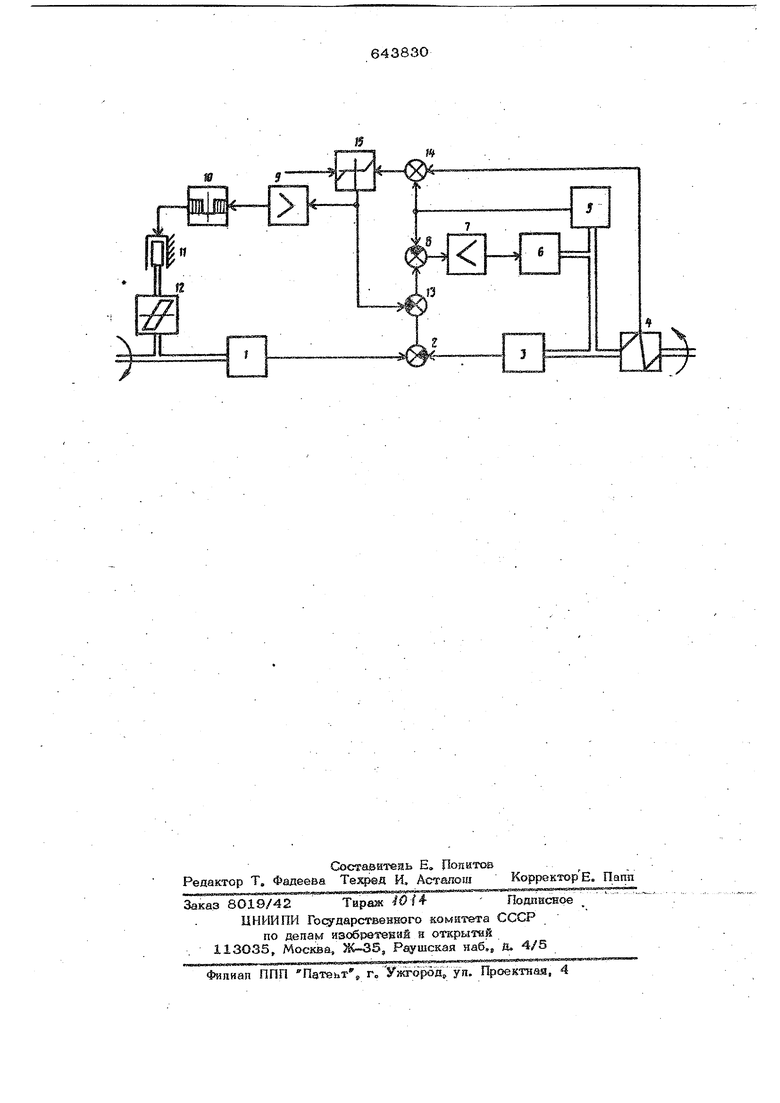
Для этого система содержит третий сумматор и последовательно соединенные четвертый сумматор и третий нелинейный элемент, выход которого подключен к входу второго усилителя и первому входу третьего .сумматора, второй вход Которого соединен с выходом первого сумматора, а выход - со вторьш Входом второго сумматора, а пер- вый и второй входы четвертого сумматора, подключены к выходам датчика скорости и датчика момента испопнитеп ного органа соответственно, На чертеже дана 4ункционапьная схе ма системы. Она содержит датчик 1 по ndjkeHHSt задающего органа, первый сумматор 2, датчик 3 положений исполнительного органа; датчик 4 момента иопбпнитепьного органа, датчик скорости испопннтёльный .элемент 6, первый усилитель 7, второй сумматор 8, второй усилитель 9, первый нелинейный элемент 1О, моментный загружателЬ 11, второй нелинейный элемент 12, тpetий сумматор 13j четвертый сумматор 14 и третий нелинейный элемент 15, Система работает следующим образом. При воздействии, оператора на задаю щий орган сигнал с датчика ,1 попоже. ниа Задающего органа через первый сум клатор 2, третий сумматор 13, второй сум.матор 8 и первый усилитель 7 поступает на исполнительный элемент 6, который отрабатывает его/и произво-: дйт разворот исполнительного органа до тех пор, пока сигнал с датчика поло жениа исполнительного органа не сравн ется с сигналом датчика 1 положения задающего органа. При этом в случае, если сигнал в датчике 4 момента иополнигёльного органа не превышает зоны нё 1увствйтельности Третьего нелинейного элемента 15, то оператор не ощущает отраженного момента. При возрастании момеята на исполнительйом органе до вепи инЬ, превышающей Заданную оператором величину, на выходе третьего нелинейного элемента 15 пойвляетсй сигнал; который через второй усилитель 9 воздействует на мОментныЙ аагр жатель 11 задающе го органа, и оператор ощущает отражен ный момент. В то же вргемя этот сшгнап попадает на исполнительный элемен как отрицательная обратная связь по моменту, под действа ем которой проиоХОДИТ стабилизация момента на выходном валу следящей системы, что приводит к повышению точности системы. Формула изобретения Следящая система с отражением усилия, содержащая последовательно соединенные датчик положения задающего орг гана и первый сумматор, второйвход которого подключен к выходу датчика положения исполнительного органа, свя занного с исполнительным элементом, датчиком момента исполнительного органа и датчиком скорости, выход которого через последовательно соединенные второй сумматор и первый усилитель подключен к входу исполнительного элемента, и последовательно соединенные второй уЬилитель, первый нелинейный элемент и моментный загружатель, связанный через второй нелинейный элемент. с датчиком положения задающего орга- Has о т л и ч а 10 щ а я с я тем, что, с целыо повыщения то йюсти системы, она содержит третий сумматор и последовательно соединенные четвертый сумматор и третий нелинейный элемент, выход которого подключен к входу вто рЬго усилителя и первому входу третьего сумматора, второй вход которого соединен с выходом первого сумматора, а выход со вторым входом второго сумматора, а первый и второй входы че1 вертого сумматора родкшочены к выходам датчика скорости и датчика момента исполнительного органа соответственно.. Источники инфс мации, принятые во внимание при экспертизе:, 1.Кулешов В, С., Лакота Н, А, Динамика систем управления манипуляторами. М., Энергия, 1971, с. 18&190. 2.Авторское свидетельство СССР №317039, М, кл. Ъ ОБ В11/01, 1070,
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система с отражением усилия | 1987 |
|
SU1531070A1 |
| Устройство для управления копирующим манипулятором | 1982 |
|
SU1030769A1 |
| Устройство для управления копирующим манипулятором | 1981 |
|
SU987573A1 |
| Обратимая следящая система | 1982 |
|
SU1029137A1 |
| Обратимая следящая система | 1983 |
|
SU1176301A1 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления копирующим манипулятором | 1980 |
|
SU935871A1 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Обратимая следящая система | 1979 |
|
SU943637A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |