Изобретение относится к робототехнике, может быть использовано при создании дистанционных копирующих манипуляторов и является усовершенствованием устройства по авт.св, № 582960.
Цель изобретения -расширение функциональных возможностей устройства за счет снижения величины нагрузочных моментов на руку оператора.
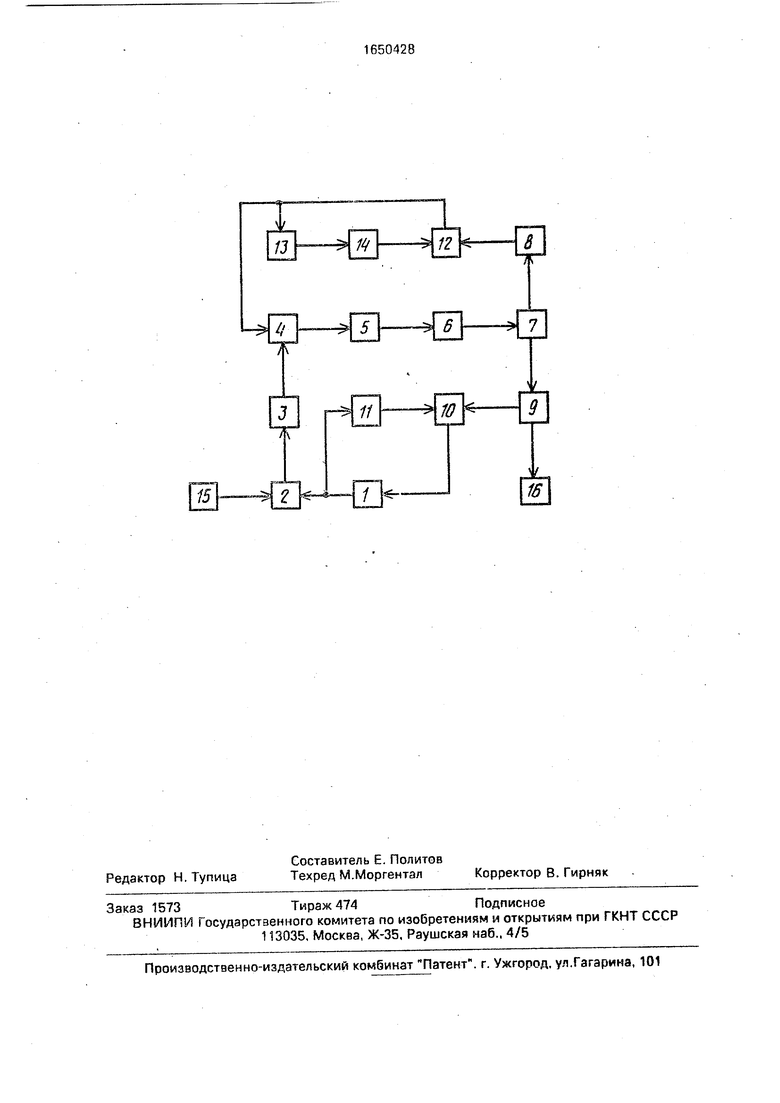
На чертеже представлена функциональная схема устройства.
На схеме указаны: электропривод 1, упругий элемент 2, датчик 3 момента, первый сумматор 4, усилитель 5, злектрогидроуси- литель 6, гидропривод 7, датчик 8 давления, датчик 9 угла исполнительного органа, второй сумматор 10, датчик 11 угла задающего органа, третий сумматор 12, нелинейный элемент 13 типа сухое трение, интегратор 14, оператор 15 и нагрузка 16 (сменный инструмент).
Устройство работает в двух режимах: режиме выполнения операций со свободными объектами и в режиме выполнений операций с объектами, на движение которых наложены внешние механические связи.
Различие режимов работы устройства основано на различии величин скорости изменения моментов при выполнении манипуляторным устройством операций с объектами, имеющими внешние механические связи, и с объектами (инструментом), не имеющими этих связей. Так, при работе со свободными объектами максимальные величины (dMrni/dt)MaKc скорости изменения момента, действующего на гидропривод 7, не превышают значения
fd М Г пЛ ,., п.мак.с
dt
Шмако tl PoltC , (1)
макс
где Шмакс максимальное значение угловой скорости перемещения объекта относительно выходного вала гидропривода;
h - приведенное к валу гидропривода 7 плечо момента от действия объекта 16;
Робмакс - грузоподъемность манипуля- торного устройства;
I - порядковый номер сустава манипуля- торного устройства.
Выполнение операций с объектами, имеющими внешнюю механическую связь, сопровождается резким изменением момента Mrm. Величина скорости изменения
ч
fe
ON
СЯ
о
4
ю
00
ю
момента Мгщ его сигнала аналога с датчиком 8 давления пропорциональна жесткости механической связи и жесткости механической характеристики гидропривода 7 и более чем на один, два порядка превышает значение, определяемое выражением (1).
В предельном случае, ко-да эти жесткости абсолютны, то даже при сколь малой скорости сближения звена исполнительного органа с объектом типа упор моментная реакция при их соударении изменяется скачком.
В режиме работы устройства со свободными объектами, когда выполняется условие
d Mrn,
d M г ni
dt
dt
оператор 15 воздействует на упругий элемент 2, угол закрутки которого замеряется датчиком 3 момента, и вырабатывается сигнал, пропорциональный силовому воздействию оператора 15. Этот сигнал поступает на первый вход первого сумматора 4. На втором входе первого сумматора 4 сигнал отсутствует, так как излом выходной характеристики элемента 13 типа сухое трение пропорционален величине (dMrni/dt)MaKc Сигнал с первого сумматора 4 подается через усилитель 5 и электрогидроусилитель 6 на гидропривод 7, Выходной вал гидропривода 7 при этом перемещается со скоростью, не зависящей от массы объекта 16 (инструмента), чем и обеспечивается снижение физичесхих нагрузок на оператора 15. Электропривод 1 осуществляет слежение своего выходного вала за положением выходного вала гидропривода 7 по сигналу второго сумматора 10, пропорциональному разности угловых положений электро- и гидроприводов 1 и 7. Информация об угловых положениях снимается, соответственно, с датчиков 11 и 9.
0
5
В процессе работы с объектом 16, имеющим внешнюю связь, например гайковертом, измерение момента dMrm/dt, связанное с изменением его положения, мало. Составляющая, пропорциональная реакции связи, выделяется на выходе третьего сумматора 12 почти полностью. Сигнал с интегратора 14 в правильно отрегулированном устройстве практически неизменен и пропорционален моментной загрузке гид- ропривода 7 от массы объекта 16, так как величина (dMrni/dt)MaKc достаточно мала по сравнению с усредненным значением d М г п,
dt
в этом режиме. Поэтому на вто0
5
0
5
0
рой вход первого сумматора 4 подается сигнал, пропорциональный реакции связи, а скорость перемещения выходного вала гидропривода 7 пропорциональна разности силового воздействия оператора 15 и реакции связи объекта 16. Здесь оператор ощущает на упругом элементе 2 силовое воздействие объекта 16, что совершенно необходимо для такого рода операций. Функции электропривода 1 здесь не меняются
Применение изобретения позволяет значительно снизить нагрузку на руку оператора при перемещении несвязанных объектов.
Формула изобретения Устройство для управления дистанционным манипулятором по апт.св Kb 582960, отличающееся гем, что, с целью расширения функциональных возможностей устройства за счет снижения величины нагрузочных моментов на руку оператора, устройство дополнительно содержит последовательно соединенные нелинейный элемент, интегратор и третий сумматор, через второй вход которого выход датчика давления подключен к второму входу первого сумматора и входу нелинейного элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
Изобретение относится к робототехнике и может быть использовано при создании дистанционных копирующих манипуляторов. Целью изобретения является расширение функциональных возможностей устройства за счет снижения нагрузочных моментов на руку оператора. Для этого в устройство введены нелинейный элемент, интегратор и сумматор, обеспечивающие снятие с руки оператора момента нагрузки от свободно перемещаемых объектов. 1 ил.
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
