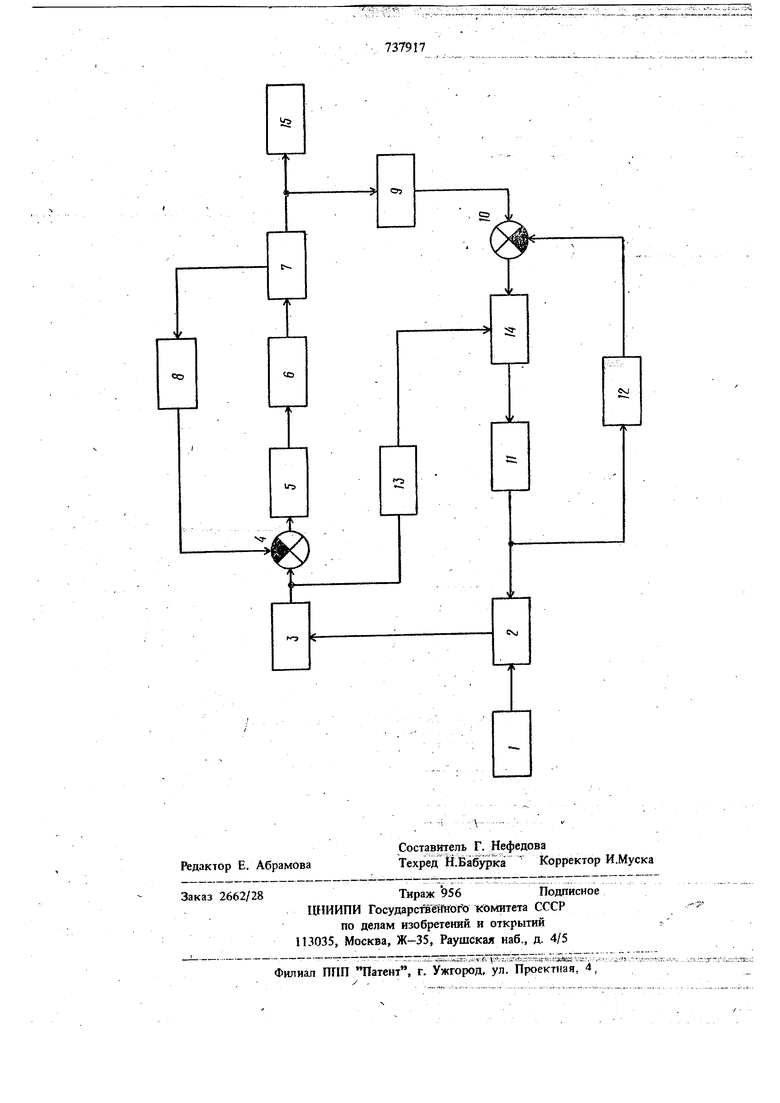
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ Изобретение относится к области робототехники и может быть использовано для управления дистанционным манипулятором, работающим с объектами, на которые наложены внешние связи. . Согласно основному изобретению по авт. св. № 582960 устройство для управления диста ционным манипулятором содержит последовательно соединенные электропривод, утфугай элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, вь1ход которого подключен ко входу первого О мматора, последовательно соединенные датчик угла исполнительного органа и второй сум матор, выход которого через последовательно соединенные электропривод и датчик угла зада ющего органа подключен ко второму входу второго сумматора, второй выход гидропривод соединен со входом датчика угла исполнительного органа, а выход датчика момента подклю чен ко второму входу первого сумматора. МАНИПУЛЯТОРОМ Недостатком данного устройства является низкая динамическая точность угловой следящей системы задающгго органа, т.е. точность копирования и очувствления в переходных режимах, что обусловлено малым значением добротности по скорости контура слежения. Целью изобретения явлйется улучшение динамических характеристик устройства. Сущность изобретения заключается в том, что устройство содержит последовательно соединенные нелинейный блок и блок умножения, через который выход второго сумматора .подаслйчён ко входу электропривода, а вход нелинейного блока соединен с выходом датчи-, КЗ момента. На чертеже представлена функциональная схема устройства, Устройство содержит оператор i, упругий элемент 2, датчик момента 3, первый сумматор 4, усилитель 5, электрогидроусилитель 6, гидропривод 7, датчик давления 8, датчик угла исполнительного органа 9, второй сумматор 10, электропровод 11, датчик утла задаю37щего органа 12, нелинейный блок 13, блок умножения 14, объект ма1шпулирования 15. Устройство работает следующим образом. Перемещая задающий орган по желаемой траектории, оператор 1 воздействует на упругий элемент 2. Датчик момента 3 замеряет деформацию упругого здемента 2, т.е. вырабатьшает сигнал, пропорциональный силовому воздействию оператора. Этот сигнал поступает на первый вход первого сумматора 4. На второй вход этого сумматора с датчика давления 8 поступает сигнал, пропорциональный силовому взаимодействию исполнительного органа и объекта манипулирования. Разностный сигаал с первого сумматора 4 подается на электронны усилитель 5, электрогидроусилитель 6 и гидропривод 7. Исполнительный орган при этом пере мещается но желаемой траектории со скоростью пропорциональной с одной стороны разности си вого взаимодействия оператора 1 и задающего органа и с другой стороны пропорциональной разности силового взаимодействия объекта ман пулирования 15 и исполнительного органа. Электропривод 11 осуществляет слежение задающего органа за исполнительным посредством второго сумматора 10 и датчиков угла исполнительного органа 9 и задающего органа 12. Блок умножения 14 изменяет добротность следящего контура в зависимости от величины сигнала с нелинейного блока 13. При Отсутствии момента на упругом элемент т.е. когда люфт редуктора электропривода 11 не выбран, добротность контура слежения минимальна, а следящий привод неподвижен. При значениях момента на упругом элементе, йревьпшющих момент трения, т.е. когда люфт едуктора электропривода 11 выбран, доботность контура слежения максимальна, а следяий привод находится в состоянии движения. обротность Д контура слежения определяется яг11алйм - с нелинейного блока 13, т.е. A где До - минимальное значение добротно сти. Практика проектирования дистанционных манипуляторов показьгоает, что наименьпше погреншости имеют место, если величина сигна-, ла определяется следующим образом: . , t при |Ц V40 npHlU J /D,llU 1 где IL , и - текущее и максимальное значения сигнала с дагшка момента 3. Применение изобретения за счет введения блока умножения и нелинейного блока позволит снизить динамическую ошибку следящего контура в 2-10 раз. Формула изобретения Устройстве для управления дистанционным манипулятором по авт.св. № 582960, отличающееся тем, что, с целью улучщения динамических характеристик устройства, оно содержит црследовательно соединенные нелинейный блок и блок умножения, через который вь1ХЬД втбрЬгО суйматор подключен ко входу электропривода, а вход нелинейного блока соединен с выходом датчика момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |