(54) ОБРАТИМАЯ СХПЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимая следящая система | 1983 |
|
SU1176301A1 |
| Обратимая следящая система | 1982 |
|
SU1029137A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Обратимая следящая система | 1980 |
|
SU951233A1 |
| Устройство для управления приводом | 1986 |
|
SU1381422A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Устройство для управления приводом робота | 1981 |
|
SU996990A2 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Устройство для комбинированного числового программного управления | 1980 |
|
SU911469A2 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
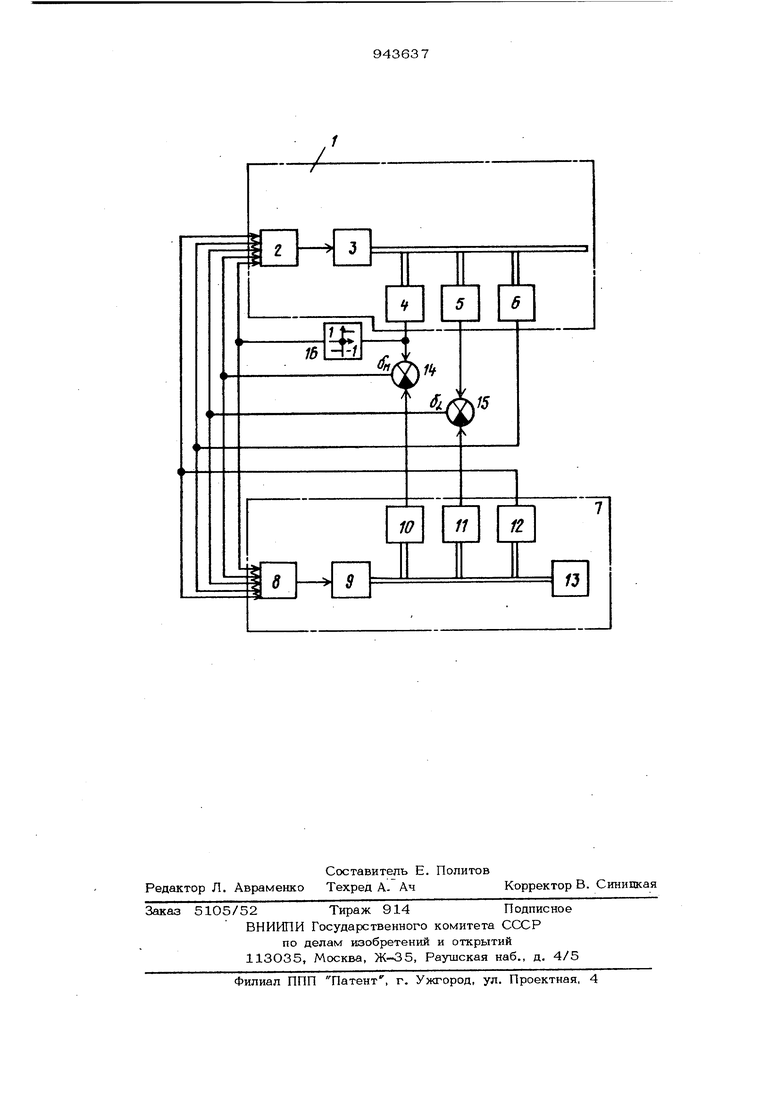
Изобретение относится к автоматичес кому управлению и может быть использовано в дистанционно управляемых копи руюпщх манипуляторах с активным отражением гсилия. Известна обратимая следящая система содержащая датчики положения, синхронны двигатели, выпрямители и полупроводниковый коммутатор l3 . Однако данная система имеет низкую точность кз-за отсутствия коррекции, устраняющей влияния сухого трения в системе. Наиболее близким к предлагаемому является система, содержащая нелинейный элемент и последовательно соединенные первый усилитель и первый двигатель, с валом которого кинематически св1гзаны первые датчики момента, пологжения и скорости, а также последователъ но соединенные второй усилитель и второй двигатель, с валом которого кинема тически связаны вторые датчики момента, положения и скорости, причем выходы первого и второго датчиков момента подключен к соответствующим входам первого сумматора, выход которого соединен с первым входом первого и второго усилителей, второй вход которых подключен к выходу второго сумматора, соответствующими входами соединенного с выходами первого и второго датчиков положения, а выходы первого и второго датчиков скорости подключены соответст венно к третьему и четвертому входам первого и второго усилителей ,2 . Недостатком известной системы является ее низкая точность, обусловленная отсутствием коррекхши, компенсирук щей влияние сухого трения покоя. Цель изобретения - увеличение точности системы. Поставленная цель достигается тем, что в системе выход первого датчика момента соединен со входом нелинейного элемента, выход которого подключен к пятому входу первого и второго усилителей. На чертеже представлена функциональная схема с ж; темы. На схеме показаны задакяций орган, первый усилитель 2, первый двигатель 3, первый датчик 4 момента, первый датчик 5 положения, первый датчик 6 скорости, исполнительный орган 7 усилитель 8, второй двигатель 9, второй датчик 10 момента; второй датчик 11 положения, второй датчик 12 скорости, объект 13 управления, первый .сумматор 14, второй сумматор 15, нели.нейный элемент 16, сигнал ошибки по мо менту rf/ , сигнал ошибки по положению (f, Система работает следующим образом При появлении на валу первого или вт рого двигателя моментов и при соответс вукхцем изменении положения валов на вы ходах сумматоров 14 и 15 появляются сигналы, которые, усиливаясь, поступают на якорные обмотки первого и второго двшателей 3 и 9. В результате на первом двигателе 3 воспроизводится момент развиваемый на втором двигателе 9 с ошибкой {f и оба двигателя начинают вращаться в одну сторону, стремясь свес ти к нулю величину рассогласования v. При этом, как только оператор приложит усилие к задающему органу 1, даже не сдвигая его с места, сигналы компенсирующей коррекции с выхода нелинейного элемента 16 уже поступят на первый и второй ус шители 2 и 8. Это приводит к .значительному уменьшению пиков ошибок системы в начальный момент ее разгона. . При изменении направления скорости движения данная коррекция также способствует уменьшению ошибок системы. Это объясняется teM, что, как только оператор примет решение изменить направление движения системы и изменит знак на выходе датчика 4, сигнал нелинейной коррекции на выходе нелинейного элемента 16 тут же изменит знак и создаст момент, уже не компенсирукнций момент трения, а увеличивающий его вдрое, так как двигатели 3 и 9 продолжают еще вращаться в прежнем направлении. Это способствует скорейшему торможению двигателей 3 и 9 и изменению направления их вращения. Применение изобретения позволяет повысить точность системы за счет компенсации отрицательного влияния сухих трений в момент вывода системы из состояния покоя, а также в момент изменения направления вращения задающего органа. Формула изобретения Обратимая следяпцая система, соаер- зкащая нелинейный элемент и последовательно соединенные первый усилитель и первый двигатель, с валом которого кинематически связаны первые датчики момента, положения и скорости, а также последовательно соединенные второй усилитель и второй двигатель, с валом которого кинематически связаны вторые датчики момента, положения и скорости, причем выходы первого и второго датчиков момента подключень к соответствуюЕшм входам первого сумматора, выход которого соединен с первым входом первого и второго усилителей, второй вход которых подключен к выходу второго сумматора, соответствующими входами соединенного с выходами первого и второго датчиков положения, а выходы первого и второго датчиков скорости подключены соответственно к третьему и четвертому входам первого и второго усилителей, отличающаяся тем, что, с целью повьш1ения точности системы, в ней выход первого датчика момента соединен с входом нелинейного элемента, выход которого подключен к пятому входу первого и второго усилителей. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 634428, кл. Н О2 К 29/02, 1977. 2.Техническая кибернетика. № 4, 1975, с. 181 - 189 (прототип).
