I
. Изобретение относится к области автоматического управления и может быть испопьаовано в силовых электрогвдравпических следящих приводах (ЗГСП) объемного управпения широкого назначения, иапркмер. машиностроительных, получающих энергию от автономных приводных двигателей ограниченной мощности.
Преимущественная обпасть применения - ЭГСП автономных объектов с жес кими ограничениями к потребляемой MOIU ности, весу и габаритам привода. Примером применения могут служить ЭГСП станков, роботов, манипуляторов, передвижных автономных установок, получающих энергию от источников энергии, например систем электрического питания (СЭП) или приводных двигателей ограниченной мощности
Известны ЭГСП, содержащие механизм управпения, регулируемый объемный гидронасос, связанный с исполнительным гидромотором силовыми гидавлическими магистралями, к которым одкшоюа датчик п епада давления yLj,,
Известные ЭГСП имеют прквоашае двигатепи(ПД), мощность которых выбирается в со ответствии с возможным максимальным знаюнием мощности гидропривода. Эта максимальН 1Я мощность ПД используется относительно редко . только в переходных процессах при больших рассогласованиях, но из-за ограниченной перегрузочной способности обуславливает завышение установленной мощности приводного даигателя и перегруз- ку СЭП, В процессе слежения обычно необходимо обеспечить либр максимальные скорости исполнительного механизма при средних значениях момента, либо максимальные моменты при малых скоростях движения исполнительной оси. При этом ПД, позволяющий получить указанные режимы работы ЭГСГ1, развивает мощность значительно меньтиё установленной предельной, соответствующей с учетом перегрузки одновременному действию развиваемых гидроприводом максимальных скоростей и моментов слежения.
В ряде случаев пред явпяют ся требования по жестким ограничениям, наложенным на потребляемую от источника энергии или ПД мощность.
Однако указанные ЭГСП не содержат специальных связей, обеспечивающих ограничение потребляемой от источника энергии мощности, что приводит к неоправданному завышению. габаритно-весовых данных ЭГСП в цепом, а в от дельных случаях и к функциональным отказам. Это является существенным недостатком рассматриваемых ЭГСП автономных устройств и объектов с ограниченной мощностью источников энергии.
Наиболее близка к изобретению, по своей технической сущности извест шя система управпения- эпектрогидравшиеским прийодЪм 2д, содержащая механизм управления, выход которого соединен с регулируемым объемным гидронасосом, связанным с исполнительным гидромотором силовыми гидравлическими магистралями, к которым подключен перепада -даЬления, и приводной двигатель, вал которого соединен с валом регулируемого объекгаогЬ гидронасо са.
Эта система при использовании ее в ЭГСП с ограничением по потребляемой мощности, имеет следующие недостатки
-мал диапазон ограничения (отно шение предельной мощности гидропривода к развиваемой мошности проводного двигателя, который не может быть большим из-за линейного характера обрат;Ной связи при ограничении
-погрещность ограничения веникадаже в статических режимах, так как схема не позволяет осуществить ограничени по произведению координат5
-уровень ограничения в данной схеме не может быть изменен в процессе работы ЭГСП при изменении скорости вра шенйя прик)дного вала насоса;
- невозможен переход с. одного уровня ограничения на другой при работе ЭГСП как в различных режимах работы, так и при применении разных приводтмх двигаЗРелей в комбинированных энергетических установках ЭГСП автономных объектов.
Все эти частные недостатки приводят к основному: бопьшно веса, габариты и потребляемая мощность привода.
Цель изобретения - упрощение привода и уменьщение потребляемой мощности ;привода.
Эта цель достигается тем, что система содержит датчик положения механизма управления, датчик скорости приводного двигателя, блок перекпючения, блок сравнения, репейный элемент и блок умножения, соответствующие входы которого подключены к выходам датчиков перепада давления, положения ме ханизма управления и скорости вала приводного двигателя, выход через блок сравнения и релейный Элемент соединен -с управляющим входом блока переключения, другой вход которого связан со входом системь, а выход соединен со входом механизма управления.
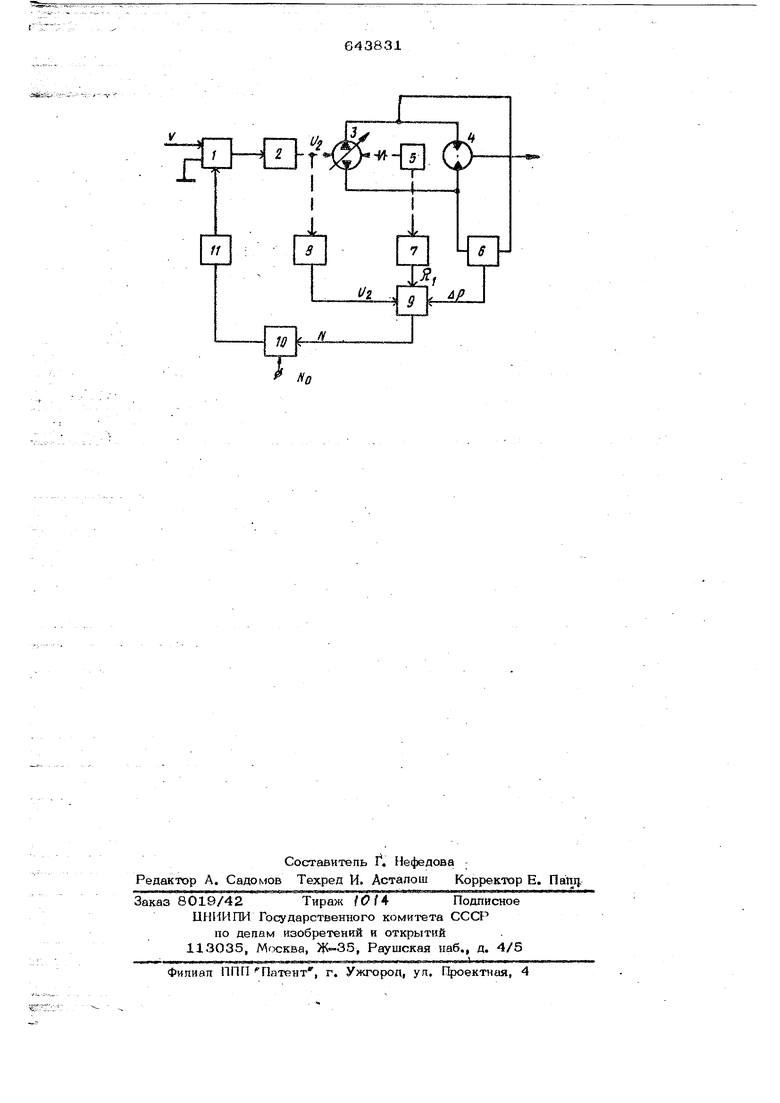
На чертеже представлена блок-схема системы управления электрогидравли- ческим приводом. Она содержит блок переключения 1, механизм управления
2,регулируемый объемный гидронасос
3,исполнительный гидромотор 4, приводной двигатель 5, датчик 6 перепада давления, датчик 7 скорости приводного двигателя 7, датчик 8 положения механизма управления блок умножения 9, блок сравнения 10 и релейный элемент 11,
На чертеже обозначены:
Кд сигнал, пропорциональный заданному уровню ограничения мощности, потребляемой от источника энергии;
IJ - ,текущее значение мощности, развиваемой в гидроприводе;
f скорость приводного двигателя;
11й угол поворота регулирующего органа насоса;..
up - разность давленйя в силовых по лостях гидронасоса, . .
В этой схеменелинейную пороговуюобратную связь образуют блок умножения 9, блок сравнения 10, релейный элемент 11, управляющие работой блока переключен 1Я 1.
.Система управления ЭГСП работает следующим образом. На один из входсв блока 1 переключения подается нормальный сигнал управления V , опредепяе мый ощибкой ЭГСП, а на другой - нулевой сигнал, что условно изображено на схеме в виде заземпения одного из входов блока переключения 1,
Блок перемножения 9 служит для непрерывного вычисления текущего значения мощности У , потребляемой ЭГСП от приводного дькгателя 5, Действитепьно, мощность воздействия гидропривода на приводной двигатель равна
. Ы дри,
где К - размертш й коэффициент, Еспи потребляемая мощность не превышает допустимую мощность Hg, то вы ходной сигнал сумматора бпока сравке ния 10 не приводит к срабатыванию репейного элемента 11 и, следовательно, блока перекпючения 1. Таким образом, на вход механизма управнения 2 поступет сигнал, и ЭГСП функционирует образом.
В случае, когда потребляемая ЭГСП мощность N становится больше заданчного допустимого уровня Kg, блок сравнения 10 и релейный . эггемент 11 выра батывают сигнал, приводящий к срабать - ванию блока переключения 1, и на вход механизма управления поступает нулевой сигнал. Это приводит к тому, что регулирующий орган насоса начинает движение к нейтральному положению и соответствующему уменьшению потребляемой мощности. Как только потребляемая мощность станет меньше допустимой, подключается сигнал . и, если затем мощность превысит разрешенный уровень, снова происходит переключение схеьлы управлений ЭГСП на нулевой входной сигнал, и процедура:. повторяется. Средняя составляющая колебаний на входе механизма управле- ния, передаваемая на регулирующий ор ган насоса, соответствует такому его положению, при котором потребляемая мощность равна допустимой. Эти колебания регулирующего органа насоса мало амплитуды и высокой частоты являются результатом работы введенной в ЭГСП нелинейной корректирующей связи. Колебания прекратятся, когда в тате обработки рассогласования cnrHanV уменьшится до величины, не вызывающей превыщения допустимой величины .потребляемой мощности. Далыдайшее функционирование ЭГСП происходит обычным образом. В результате осуществляеся ограничение потребляемой ЭГСП мощности ПД,
Сущность изобретения Подтверждаем ся проверкой модели ЭГСП на ЦВМ, а также при экспериментальном исследова« НИИ реального ЭГСП, В частности, при исследовании наЦВМ установлено, что ЭГСП, силовая часть которого имеет предельную мощность 109 квт, нормаль ПО работает, удовлетворяя заданным техническим требованиям, при наличии приводного двигателя мощностыо всего 30 КВТ. Реализация такого ЭГСП в уоповияк автономного объекта позволит существенно .снизить вес и объем аппаратуры ИСТОЧНИКОВ энергии.
Применение описанной системы управления позволит ограничить потребляемую от источника мощность, исключить функциональные откаэы по причине превьпиения заданного уровня потребляемой мощности, повысить КПД приводного двигателя и, таким образом, снизить вес и объем силовой аппаратуры ЭГСП в цепом.
Формула изобретения
Система управления электрогидравлическим приводом, содержащая механизм управления, выход которого соединен с ре1улируемым объемным гидронасосом, связанным с VIcпoлнитeлыIЫм гидромотором силовыми гидравлическими магистралями, к которым подключен датчик перепада давления, и приводной двигатель, вал которого соединен с валом регулируемого объемного гидронасоса, о т- ли чающаяся тем, что, с цепью упрощения и уменьшения и потребляемой мощности привода, она содержит датчики положения механизма управления, датчик скорости приводного двигателя, блок переключения, бнок сравнения, релейный элемент и блок умножения, соотве-гствующие входы которого подключены к выходам датчиков перепада давления, положения механизма управления к скорости вала приводного двигателя, выход через блок сравнения и релейный элемент соединен с управляющим входом блока переключения, другой вход которого связан со входом системы, а вькод соедине со входом механизма управления.
Источники информации, принятые во внимание при экспертизе:
1, Электрогидравлический следящий привод, под ред. Е. А. Хохлова, Машиностроение, М«, 1971. с. 287-307.
2,Кулагин А, В. Демидов Ю, С., Прокофьев В, Н., Кондаков Л. А. - Основы теории и конструирования объемных гидропередач. Высшая щкола, М., 1968, с. 33-36.
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой электрогидравлический следящий привод | 1975 |
|
SU589590A1 |
| Способ регулирования силовых электрогидравлических следящих приводов и устройство для его осуществления | 1975 |
|
SU705418A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554153C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |
| Гидропередача | 1986 |
|
SU1333913A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| ГИДРОПРИВОД ВЕНТИЛЯТОРОВ СИСТЕМЫ ОХЛАЖДЕНИЯ | 2000 |
|
RU2184250C2 |