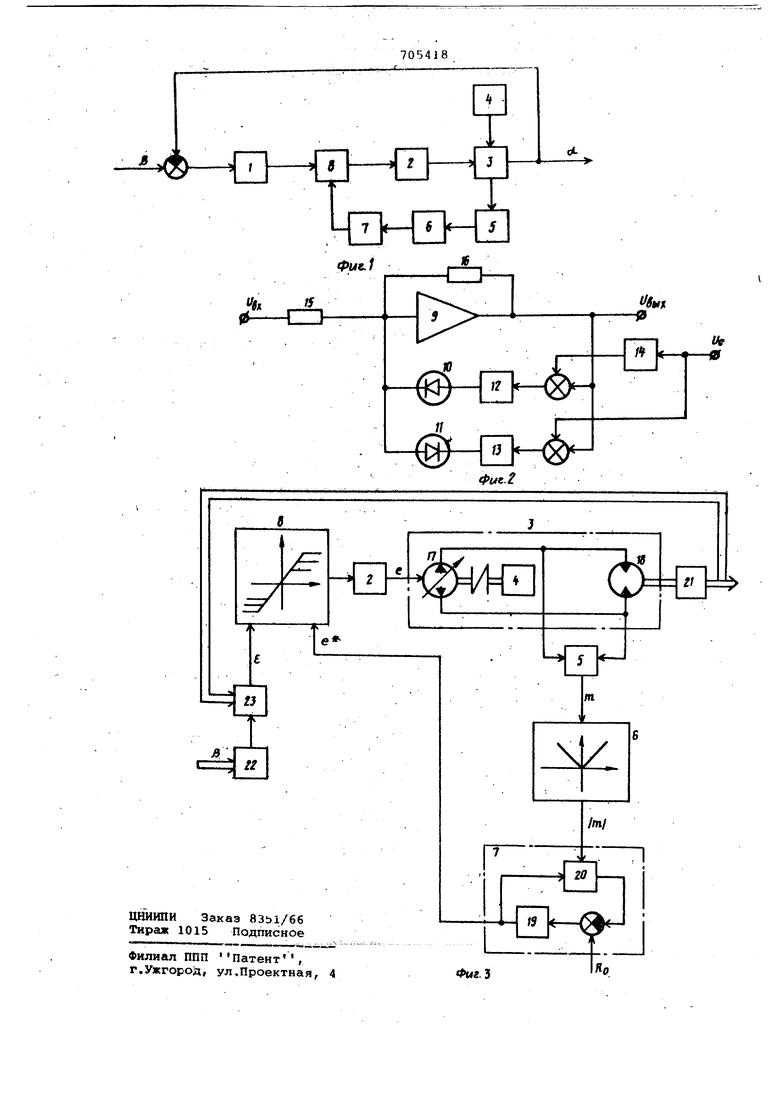
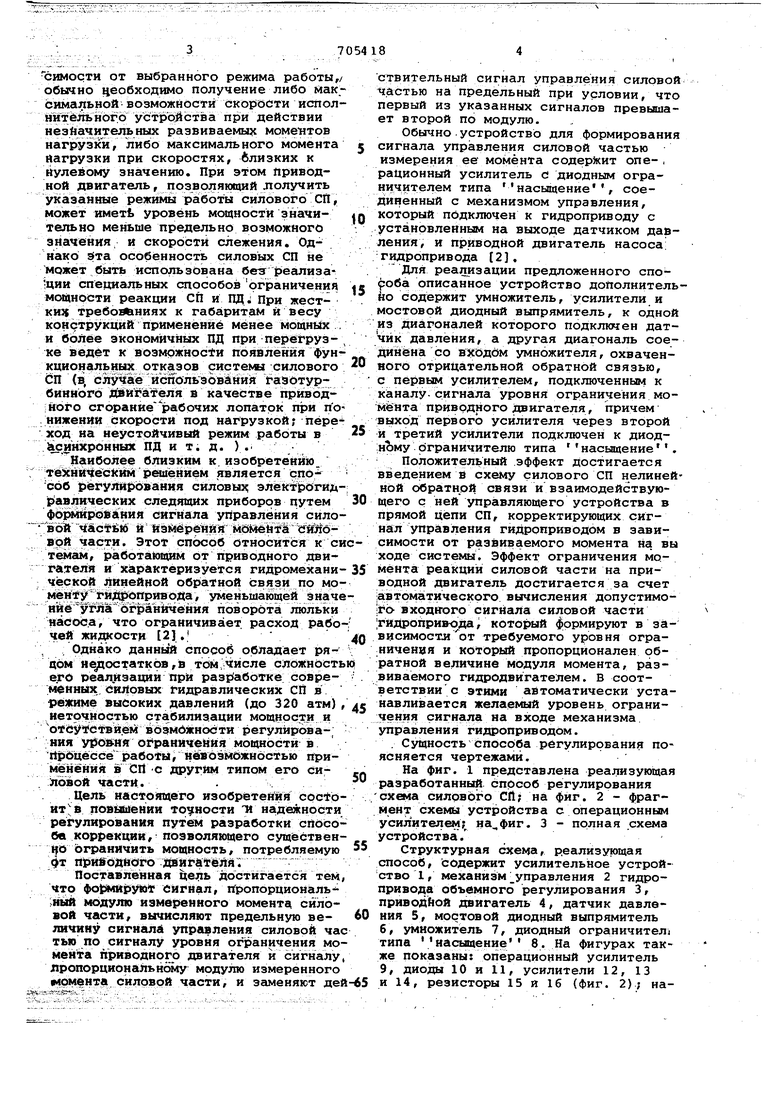
(54) способ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СИЛОВЫХ ЭЛЕКТРОГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДОВ симости от выбранного режима работы,/ обычно необходимо получение либо максимальной возможности скорости исполнитёльного ycTpoScTiaa при действии незйачительных развиваемых моментов иагрузкй, либо максимального момента нагрузки при скоростях, близких к нулевому значению. При этом йриводной двигатель, позволяющий лолучить указанные режимы работы силового СП, может иметь уровень мощности эначиФельно меньше предельно возможного значения и скорости слежения. Однако sfTa особенность силовых СП не может быть использована без реализации специальных способов ограничения мощности реакции СП и ПД при жестKHJS требояьниях к габаритам и весу конструкций применение менее моцнЬ1х , и более экономичных ПД при перёГрузке ведет к вoзмQжнoctи появления функцион 1льнь)х систеьм силового СП (i сйуШе ЙС17ОЛ1Гэоваййя: га зотурбинйого ДЙИ;ра ёля в качестве прйвод:ного сгорание рабочих лопаток при по .нижении скорости под нагрузкой; пере ход на неустойчивый режим работы в синхронных ПД и т. д. ) . Наиболее близким к, изобретению, тё нЙчёс сиМ решением является спо; соб { ёгул и 6ва1ння силовых элёкт рогйд{ авлических следящих приборов путем фбрйирббания сигнала управления сило1вбй tiac siJoi и йэмёре1Йи5Г мбйёМа V ври части. Этог способ относится к си темам, работакщим от приводного дви- гателя и характеризуется гидромеханичёской линейной обратной связи по моменту гидропривода, уменьшающей значе ние угла ограничения поворота люльки «aiCoca, что ограничивает расход рабо чей жидаости 2. Однако данньй способ обладает рядом не/юстатков ,в том. сложность его реализации при разр/аботке совре;м$иных, силовых гидравлических СП в режиме высоких давлений (до 320 атм) неточностью стабилизации мощности и Ъ еу ствйём вбзмбжности регулйрова-; ния уроешя О1: раничеййя мощности в йрбцёссё работы, нввбзйбжнбстью п имёнёНйя в СП С другим типом его СиЛоаой части. . . Цель настоящего изобретения срсТо итв повшении точности и на1дежности регулирования путем разработки спосо ба коррекции, позволяющего сущёствен ifO ограничить мощность, потребляемую т rtipHffbftHofо jEcsata eiifl: Поставлёниая цель достигается тем; что сигнал, Лропорциональ;ный модулю измеренного моменте силовой части, вычисляют предельную величину сигнала упргюления силовой ча тьп по сигналу уровня ограничения мо меНта приводного двигателя и сигналу лропорциональному модулю измеренного момента силовой части, и заменяют де ствительный сигнал управления силовой частью на предельный при условии, что первый из указанных сигналов превышает второй по модулю. Обычно устройство для формирования сигнала управления силовой частью измерения ее момента содерЗкит one- , рационный усилитель с диодным ограничителем типа насыщение, соединенный с механизмом управления, который подключен к гидроприводу с установленным на выходе датчиком давления, и приводной двигатель насоса; гидропривода 2. Для реализации предложенного спо9оба описанное устройство доПолнительйо содержит умножитель, усилители и мостовой диодный выпрямитель, к одной из диагоналей которого подключен датчик давления, а другая диагональ соединена со входбм умножителя, охваченного отрицательной обратной связью, с первым усилителем, подключенным к каналу.сигнала уровня ограничения момёНта приводного двигателя, причем выход первого усилителя через второй и третий усилители подключен к диод:нЪму ограничителю типа насыщение. Положительный эффект достигается введением к схему силового СП нелинейной обратной связи и взаимодействующего с ней управляющего устройства в прямой цепи СП, корректирующих сигнал управления гидроприводом в зависимости от развиваемого момента На вы ходе системы. Эффект ограничения момента реакций силовой части на приводной двигатель достигается за счет автоматического вычисления допустимо|г6 входного сигНаЛа силовой части тйдрЬйривчэда, который ормируют в зависимостлот требуемого уровня ограничения и который пропорционален обратной величине модуля момента, развиваемого гидродвигателем. В соответствии с этими автоматически устанавливается желаемый уровень ограничения сигнала на входе механизма управления гидроприводом. . Сущность способа регулирование поясняется чертежами. На фиг. 1 представлена реализующая разработанный способ регулирования схема силового СЛ на фиг. 2 - фрагмент схемы устройства с операционным усилителем; . 3 - полная схема устройства. Структурная схема, реализующая способ, Ьодержит усилительное устройство 1 , механизм управления 2 гидропривода объемного регулирования 3, приводйой двигатель 4, датчик давления 5, мостовой диодный выпрямитель 6, умножитель 7, диодный ограничителе типа насыщение 8. На фигурах также показаны; операционный усилитель 9, диоды 10 и 11, усилители 12, 13 и 14, резисторы 15 я 16 (фиг. 2); на,сос 17, гидродвигатель 18, блоки 19 и 20 умножителя, редуктор 21, датчи ки положения 22 и 23. Способ регулирования включает в себя следующие операции: измерение момента m силовой части датчиком дав пения 5; формирование в элементе 6 сигнала, пропорционального модулю m силового момента, развиваемого сило вой частью; вычисление элементом 7 , предельной величины сигнала управле ния силовой частью е как частного от деления сигнала уровня момента силовой части реакции на приводной двигатель R на модель момента (при формировании) путем замены сигнала g с помощью элемента 8 и механизма управления 2 на в ходе с илов ой части сигнала fc при условии, что действительная величина сигнала управления силовой частью превышает предельную то есть при , и .сигнала е при невьптолнении этого условия,то есть при е ig е. При действии на входе силовой час ти гп сигнала е. выполняется граничное условие отсутствия перегрузки приводного двигателя 4 по моменту реакции , причем непрерывное выполнение условия е s е гарантирует ограничение мощности, потребляеW Vfc мой гидроприводом мfie.т - --г11м I Предлагаемый способ регулирования с целью повышения функциональной над ности и упрощения настройки привода, реализуется при включении в цепь ошибки СП в качестве элемента. 8 пере механизмом управления 2 операционного усилителя с ограничением типа яасыщения, уровень которого авто матически изменяется пропорционально предельной величине сигнала управле;ния силовой частью. Эта величина вычисляется элементами корректирукицёй .обратной связи, состоящей из последовательно соединенных устройств, формирующего модуль сигнала датчика давления, и умножителя. Сигнал датчика давле.ния дает информацию о моме те СП, а выходной сигнал умножителя гШедставляет срббй -.частное от деления постоянного по величине си1гнала, пропорциональногосигналу уровни ограничения момента силовой реак ции СП, на сигнал, пропорциональный модулю момента силовой части. Эффективность регулирования будет более высокой при большем по срс1внению с силовой частью быстродействии механи ма управления. принципиальным является то, что , учитывается взаимодействие гидропривода с источником энергии и ограничи вается не момент силовой части т, а момент на валу приводного двигателя R. Момент силовой части определяется Нагрузкой гидропривода. В режиме
-71354 18 ограничения момента приводного двигателя изменяется положение регулирующего органа насоса е по закону: /е/ -е где RO уровень ограничения момента приводного двигателя; е - предельное Значение угла по:ворота регулирующего органа. В силу этого момент на валу приводного двигателя R .его оказывается ограниченным: R ,R что и позволяет исключитгь перегрузки источника энергии (приводного двигателя) и обеспечить достижение поставленной цели. В предлагаемом устройстве эффект ограничения мсмента реакции достигается (фиг. 2) при охвате части элемента. iS по фиг.1 обратной связью,,содержащейЬперационный усилитель 9 с обратной связью состоящей из двух диодов 10 и 11 и трех усилителей 12, 13 и 14. Такая обратная связь является извест-г .ным диодным ограничителем выходного сигнала операционного усилителя. Особенность ограничителя заключается в наличии дополнительных усилителей, два из которых - 12 и 13 двляютсй . суммирующими буферами,атретий - 14 инвертируюошм. Общая точка усилителя У и встречно включенных диодов 10 и 11 подключена к суммирующей точке,а I противоположные точки диодов подключены к выходам усилителей 12 и 13,На входы этих усилителей подается выходной сигнал операционного усилите{ля ивьГх и опорное напряжение Uo,coot(Ветствующеё сигналу уровня ограниче1ния Kg.На один из буферных усилителей опорное напряжениеUQподаетея через . усилитель 12.Полярность ОПОРНОГО напряжения такова, что при .отсутствии сигнала Ugy диоды заперты. Обратные связи, охватывающие через диоды операционный усилитель, являются отрицательными. Это достигается, в частности, при использовании усилиTejielS 12 и 13, не изменяющих фазу ,, входного сигнала, например эмиттерных повторителей. Если выходное напряжение меньше опорного нагГряжения Uo по модулю, то диоды заперты, и операционный усилитель имеет коэффициент передачи, определяемый величинами сопротивлений резисторов 15 и 16, стоящих на входе и в обратной связи. Когда под влияниемвозрастающего входного напряжения, напряжение на выходе достигает абсолютной величины значения опорного напряжения, один из диодов будет открытыя, а коэффициент передачи усилиеля резко уменьшается. В этом слуае с достаточной для практики точностью, выходнье напряжение можно Считать постоянным и равным опорному напряжению. Формируемое корректирующей обратной связью привода переменное опорное напряжение, благодаря наличию буферных усилителей, динамически изменяет уровень ограничения выходного сигнала усилительного устройства. Полученный таким образом ограничитель в цепи ошибки привойа: позволяет структурно изобразить усилительное устройство СП в виде формирующего; элемента, показанного на фиг. 3. Функциональная схема устр ства реализации предложенного способа регулирования, изображенная на . 3, ;содержит: механизм управле 1ия 2, силовую часть гидропривода D6j eMHoro регулирования 3, включающего в себя насос 17 и гидродвигател 18, приводной двигатель 4, датчик давления 5, формирующий модуль элемент 6, умножитель 7, вклн}чающий в себя блок 19 и 20, элемент 8, редуктор 21, дающий и принимающий датчики положения 22 и 23, выделяющие ошибку СП , RO - сигнал, несущий информацию об уровне ограничения момейта реакции ГП на ПД, и fb и сС УГлы поворота входного и выходного ралов привода соответственно. I Принцип действия данного устройства соответствует описанию порядка действий в предлагаемом способе ог. ранйчёййя мощности приводного двигатеЯя в системе ЭГСП. П)едлагаемый способ и устройство, его реализующее,получили проверку пр :пЬмощи моделирования на АВМ. Характе рен результат проверки в наиболее тяжёлом режиме отработки ступенчато го входного сигнала большой величины обратной связи. Применение данного способа позволяет ограничивать потр лёйие мощности привбднЬго дв игателя в системе ЭГСП на определенном уров Ошибки системы, вызванные наиболее тяжелым для системы ступенча тым воз действием входного сигнала, кратк временйы и обусловлены инер.тностьюЧ механизма управления. Использование нового способа - o раничения мощности приводногй двига теля в системе ЭГСП - выгодно отличает предлагаемый силовой СП от известных решений, ак как позволяет существенно ограничить мощность, цотребляемую от приводного двигателя ограниченной мощности и, таким 1эбразом, исключает возможность функ ционального отказа системы. Использование новых структурных элементов к корректирующей цепи поз волит значительно повысить функциональную наЕдежность силового СП без применения силовых;Стабилизаторов.и различного рода силовых преобразо вателей энергии, увеличивающих вес и габариты системы, что в свою очередь увеличивает сферу применения ЭГСП, конструкции которых будут более надежны и экономичны. Формула изобретения 1.Способ регулирования силовых электрогидравлических следящих приводов путем формирования сигнала управления силовой частью и измерения момента силовой части, отличающийся тем, что, с целью повышения точности и надежности регулирования, формируют сигнал, пропорциональный модулю измеренного момента силовой части, вычисляют предельную величину сигнала управления силовой частью по сигналу уровня ограничения момента приводного двигателя и сигналу,пропорциональному модулю измеренного момента силовой части,и заменяют действительный сигнал управления силовой частью на предельный ври условии,что первый из указанных сигналов превышает второй по модулю. 2.Устройство для реализации способа по п. 1, содержащее операционный усилитель с диодным ограничителем типа насыщение, соединенный с механизмом управления, который :.полключен к гидроприводу с установленным на выходе датчиком давления. и приводной двигатель насоса гидропривода, отличающийся тем, .что, с целью повышения точности и надежности устройства, оно содержит умножитель,усилители и мостовой диодный выпрямитель,к одной из диагоналей, которого подключен датчик давления ,д другая диагональ соединен со вхСдом умножителя, охваченного отрицательной обратной связью с первым усилителем, подключенным к каналу сигнала уровня ограничения момента приводного чвигателя, причем выход первого усилителя через второй и третий усилители подключен к диодному ограничителю типа насыщение Источники информации, принятые во внимание при экспертизе 1. Сб. Нелинейные корректирующие устройства в системах автоматического управления . Под. ред. профессора Ю.И. Топчиева.М.,Машиностроение; 1971, с. 18.. :2. Кулагин А.В., Денисов Ю.С. и др . йсновы теории и конструирования объемных гидропередач. М.,Высшая школа ; 1968, с. 34, рис. 111.2 (прототип) , 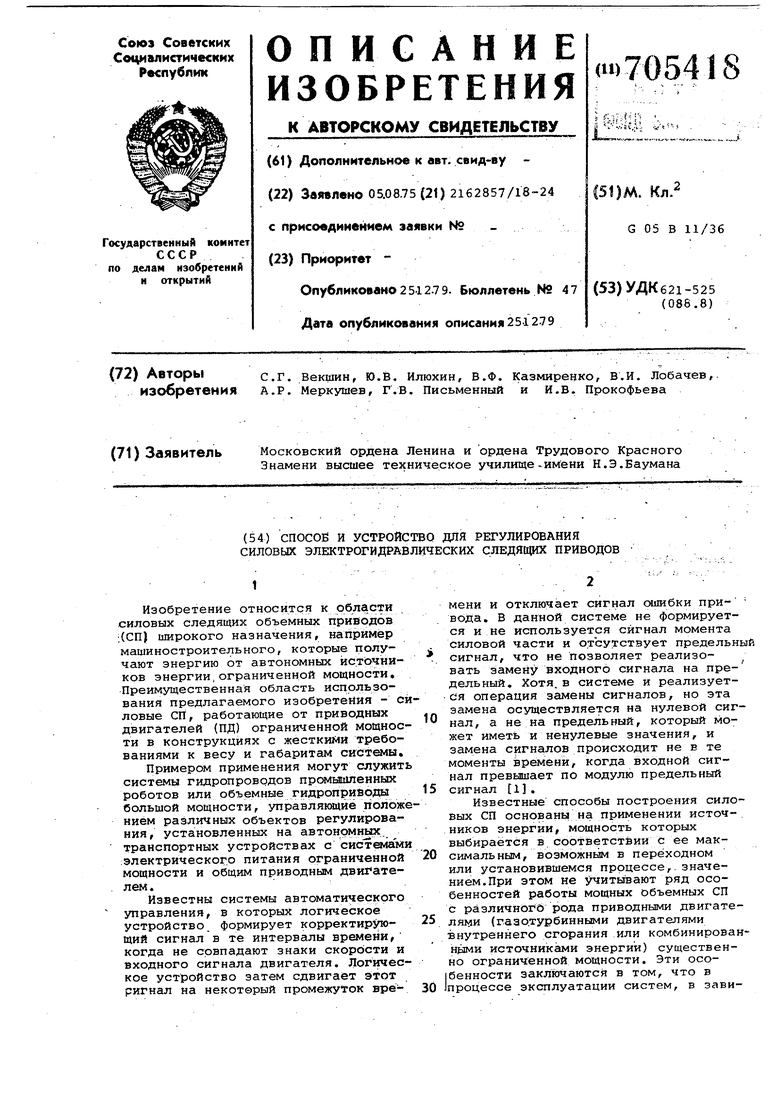
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электрогидравлическим приводом | 1976 |
|
SU643831A1 |
| Силовой электрогидравлический следящий привод | 1975 |
|
SU589590A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Устройство для допускового контроля напряжений | 1981 |
|
SU1091124A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |