Существенным недостатком известного способа является принятый принцип сравнения текущего значения кода между двумя контрольными точками с эталонным сигналом, эквивалентным расчетному коду между этими точками, что приводит к появлению накопленной ошибки преобразования, затрудняющей обработку результатов измерения для определения истинной ошибки преобразования в каждой контрольной точке относительно ее расчетного положения в большом массиве измерений.
Целью настоящего изобретения является повышение точности измерения ошибки преобразования угла. Поставленная цель достигается тем, что измеряют текущее значение сигнала в момент первой после нуля смены кода, принимают его за начало отсчета, суммируют этот сигнал с эталонным сигналом постоянной величины и запоминают первый суммарный сигнал, соответствующий углу положения первой контрольной точки, затем к первому суммарному сигналу прибавляют эталонный сигнал постоянной величины и запоминают второй суммарный сигнал, соответствующий расчетному углу положения второй контрольной точки, далее процесс измерения повторяют в ряде контрольных точек при повороте вала на 360°,
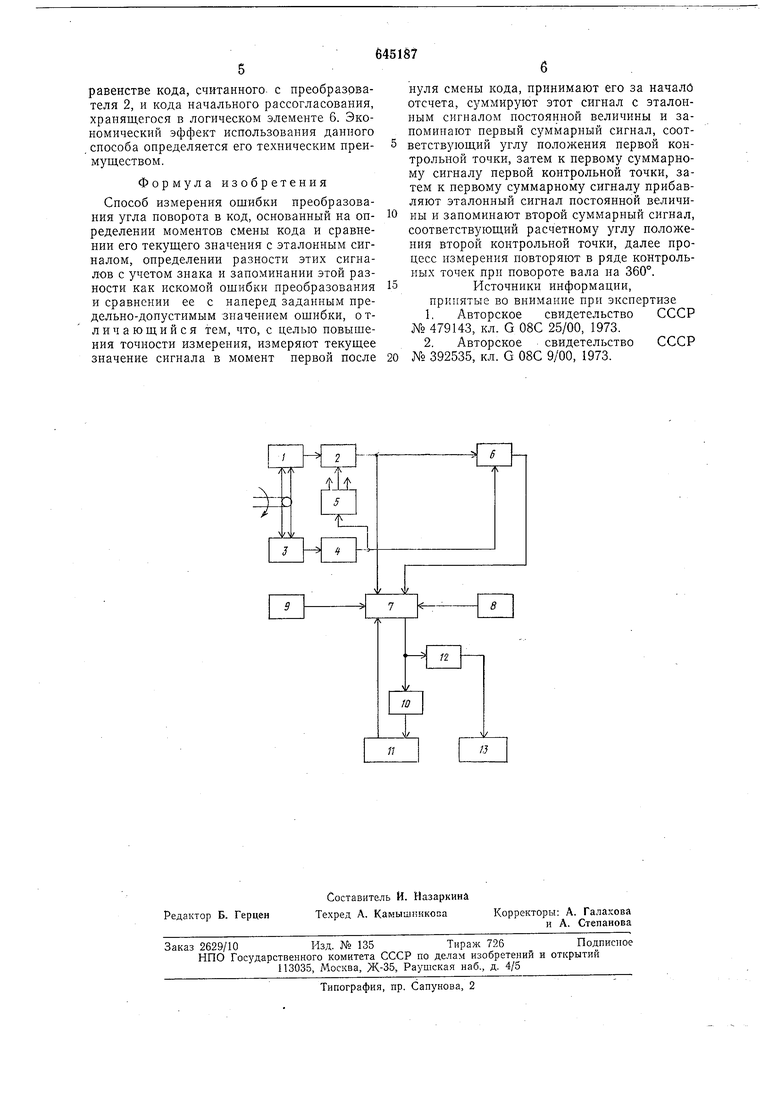
Блок-схема устройства для проверки преобразователей угол-код, реализующего предлагаемый способ измерения ошибки преобразования, представлена на чертеже.
Устройство содержит эталонный преобразователь 1, соединенный с одним из входов преобразователя 2 кода, и проверяемый преобразователь 3, соединенный со входом преобразователя 4 кода, установленные на одном валу. Выход преобразователя 4 соединен с одним из входов блока 5 управления, выход которого соединен со вторым входом преобразователя 2, а выход последнего подключен ко входу логического элемента 6 начала отсчета. Для упрощения остальные связи блока 5, управляющего работой элементов устройства, не показаны. Второй вход логического элемента 6 подключен к выходу преобразователя 4.
Выходы преобразователя 2 и логического элемента 6 подключены к соответствующим входам сумматора 7 анализатора текущей погрешности, содержащего также блок 8 хранения расчетного угла, блок 9 хранения допуска, блок 10 считывания, регистр И хранения расчетных чисел, буферный регистр 12 хранения текущей погрешности, соединенный со входом блока 13 сигнализации и регистрации ошибки.
Причем блоки 8 и 9 соединены с соответствующими входами сумматора 7, другой вход которого соединен с выходом регистра И, вход последнего подключен через блок считывания 10 к выходу сумматора, соединенному также с буферным регистром 12.
Работает устройство следующим образом. Производится пуск устройства, и при вращении вала в сторону увеличения угла с выхода эталонного преобразователя 1 сиг5 нал в виде специального кода поступает на вход преобразователя 2, а сигнал с выхода проверяемого преобразователя 3 - на вход преобразователя 4, с выхода которого двоичный код подается на вход логического
10 элемента 6 и на вход блока управления 5. Двоичный код с выхода преобразователя 2 поступает на второй вход логического элемента 6, в котором запоминается двоичный эквивалент угла поворота эталонного преобразователя от нулевого положения до появления первой после нуля контрольной точки проверяемого преобразователя при смене его кода, принимаемой за начало отсчета, и записывается в сумматор 7. По
0 команде блока 5 в сумматоре 7 код начального рассогласования суммируется с кодом расчетного угла, соответствующим эталонному сигналу постоянной величины между двумя соседними контрольными точками,
5 который вводится из блока 8 и затем через блок 10 результат суммирования выводится для запоминания в регистр И. Полученное число представляет собой код расчетной величины угла положения первой после начала отсчета контрольной точки, при появлении которой с выхода преобразователя 2 код текущего значения угла положения данной точки записывается в сумматор, где он вычитается из кода расчетного числа. Кодовое значение числа, получаемое в сумматоре 7, представляет собой величину текущего значения ошибки преобразования, одновременно в сумматоре определяется и знак ошибки. Затем знак и величина ошибки выводятся для запоминания в буферный регистр 12 в сумматор вводится с блока 9 для вычитания допуск, соответствующий наибольшей наперед заданной величине текущей ошибки положения контрольной точки
5 относительно расчетного.
В случае превышения ошибки преобразования над величиной допуска сумматор выдает на блок 13 сигнал превышения. После этого величина и знак кода текущей погрешности, а также результат сравнения ее с заданным допуском выводятся на регистрирующее устройство. Далее сумматор 7 сбрасывается в исходное состояние и в него записывается код расчетного числа из регистра 11, а затем из блока 8 вводится код расчетного угла регистра И, и в результате суммирования будет получен код расчетного значения угла положения следующей контрольной точки, который выводится снова на регистр 11. При появлении этой контрольной точки цикл работы повторяется.
Далее процесс измерения повторится для всех контрольных точек при повороте вала проверяемого преобразователя на 360° дуговых. Окончание проверки наступает при
равенстве кода, считанного с преобразователя 2, и кода начального рассогласовання, хранящегося в логическом элементе 6. Экономический эффект использования данного . способа определяется его техническим преимуществом.
Формула изобретения
Способ измерения ошибки преобразования угла поворота в код, основанный на определении моментов смены кода и сравнении его текущего значения с эталонным сигналом, определении разности этих сигналов с учетом знака и запоминании этой разности как искомой ошибки преобразования и сравнении ее с наперед заданным предельно-допустимым значением ошибки, о тличающийся тем, что, с целью повышения точности измерения, измеряют текущее значение сигнала в момент первой после
нуля смены кода, принимают его за начало отсчета, суммируют этот сигнал с эталонным сигналом постоянной величины и запоминают первый суммарный сигнал, соот5 ветствзющий углу положения первой контрольной точки, затем к первому суммарному сигналу первой контрольной точки, затем к первому суммарному сигналу прибавляют эталонный сигнал постоянной величины и запоминают второй суммарный сигнал, соответствующий расчетному углу положения второй контрольной точки, далее процесс измерения повторяют в ряде контрольных точек при повороте вала на 360°.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 479143, кл. G 08С 25/00, 1973.
2.Авторское свидетельство СССР № 392535, кл. G 08С 9/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения ошибки преобразования угла поворота в код | 1981 |
|
SU1018141A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1980 |
|
SU903937A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ПРЕОБРАЗОВАТЕЛЕЙУГОЛ — КОД | 1970 |
|
SU277416A1 |
| Устройство для определения погрешности преобразователя угла поворота вала в код | 1981 |
|
SU993307A1 |
| СПОСОБ ПОВЕРКИ ПРЕОБРАЗОВАТЕЛЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1991 |
|
RU2060585C1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Параллельно-последовательный аналого-цифровой преобразователь | 1985 |
|
SU1305851A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2013 |
|
RU2534971C1 |
| Оптоэлектронное устройство для измерения линейных размеров | 1984 |
|
SU1180695A1 |
