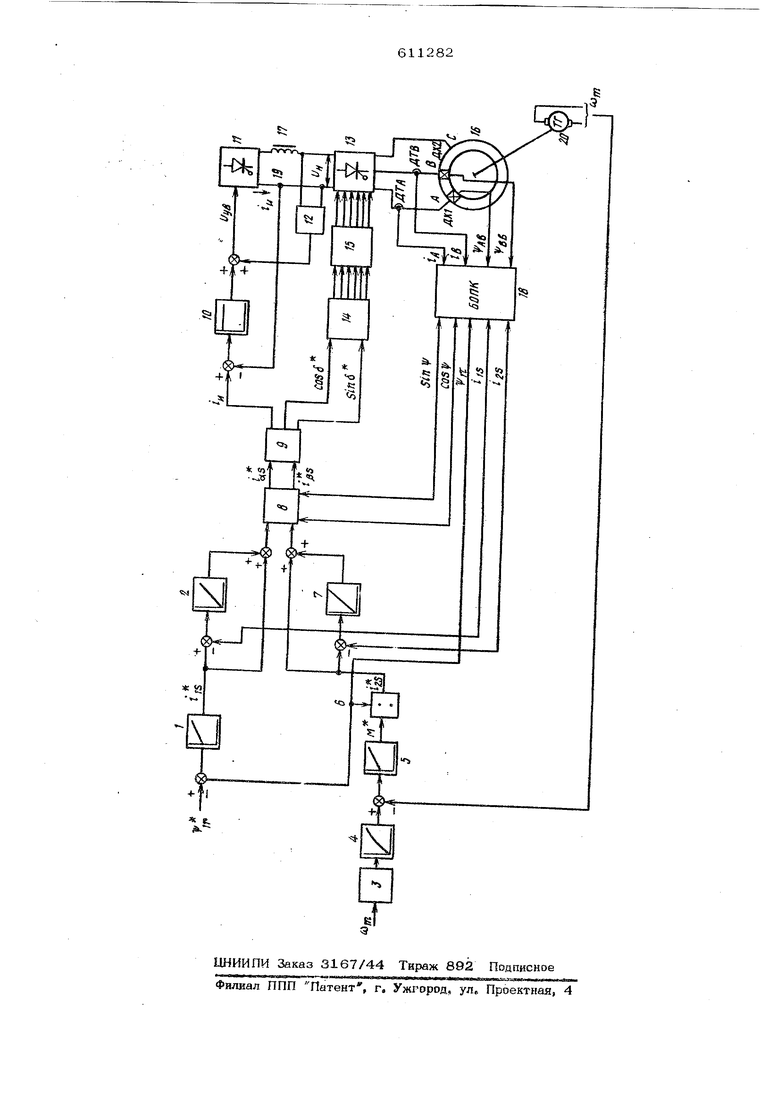
Один канап системы регулирования энект ропрнвода состоит вз иитеграпько-пропорцио напьного (ИП) регулятора потокосцеппений статора 1, И-регуп5ггора намагничивающего тока статора (РТ1) 2, а другой каная - иэ аадатчика интенсивности 3, фипьтра 4, ИП регулятора скорости 5, депитепьного устрой ства 6 и И регупятора активного тока статора {РГ2) 7. Регупяторы в каждом канаде соединены между собой по принципу под чиненного регупирЪваниЯа Выходы суммато: ров оёоих каналов подключены к блоку прямого преобразования кординат 8, связан ного с баском преобразования переменных О. Последний вьфабатьтает сигнал ния модуля тока статора, поддерживаемого с помощью регулятора модуля тока 1О, вы ходной сигная которого поступает на вход сумматора системы управления выпрямитеаем il. На другой вход сумматора порается сигнал с выхода датчика напря жения 12 автономного инвертора тока 13 (АИТ), чем обеспечивается компенсация реакции АИТ,, ;; Помимо указанного, бпок 9 формирует задающие гармонические сигналы sin §Гсо&5 угла обобщенного вектора Ia тока статора, подключённые ко входам распределителя импульсов 14, соединенного с формирователем. импульсов 15 системы управления инвертором АИТ, выход которого соеш1нен со статором асинхронного двигателя 16. Между выпрямителем 11 и АИТ включён силовой дроссель 17. В блоке об,ратного преобразования переменных 18 по сигналам датчиков фазных токов ДТА, ДТВ ;и датчиков магнитного потока : ДХ1, ДХ2, расположенных по осям фаз А,В статораi, формируются сигналы обратных связей по потокосцеппению ротора и соответствующим токам статора и гармонические функции угла У между вектором Г и магнитной осью А фазы статора. Соответствующие контуры замкнуты также по сигналам датчика тока ДТ 19 и датчика скорости ТГ 2 ,. Работа предлагаемого устройства в типовом режиме протекает следующим образом. Сначала подается задающий сигнал на вход регулятора ,1, который вырабатывает уставку для регулятора 2, Последний, в свою очередь, формирует уставку г J регулятора 1б. Переходный процес установки заданного значения формируется совместным действием регуляторов 1, 2 и 10. Затем на вход регулятора скорости -5 черезфильтр 4 подается сглаженный линейный сигнал задания скорости. Одновременно на выходе регулятора скорости 5 появляется сигнал задания электромагнитно94 ГО момента М , который после прохождения через депительное устройство 6 образует сигнал задания активного тока статора i. Контуры регулирования скорости,активного и намагничивающего токов статора совмест тио с контуром регулирования входного тока инвертора и каналом управления фазой обобщенного вектора токов статора формируют типовую диаграмму электромагнитного моментва соответствующую предписаниям симметричного оптимума, используемого обычно для настройки высококачественных приводов постоянного тока. В результате происходит быстрый разгон двигателя 16 до заданной скорости. Помимо этого предлагаемый пр.и;Вод обеспечивает быструю отработку возсмущений но нагрузке и но напряжению питак щей сети., Введение Й-регупяторов токов РТ1 и РТ2 обеспечивает астатическое регулирование составляющих полного тока статора, поэтому4)азовая ошибка вектора тока статора, Т которая могпа бы возникнуть ннтервапов коммутации тиристоровГ инвертора, сводится к нулю в установившемся режиме. Введение дополнительных контуров регулирования токов Статора не визьгоает, .умеиьвдения быстродействия, так-как. дополнительно входы сум- маторов блока, прямого преобразования переменных 8 соединены прямыми жесткими форсирующими связями с выходами регулятора 1 и делителя 6. Помимо указанного, введение регуляторов 2 и 7 позволяет упростить регулятор 1О, сделав его пропорциональным (против ИП-регулятора в известном устройстве ). Таким образом предложенный электропривод обеспечивает астатическое регулярен вание фазы тока статора более. простыми техническими средствами. При этом более простым оказывается регулятор входного тока инвертора. чБолее простая схема управления обеспечивает повышение надежности работы электропривода. Формула изобрётения 1. Электропривод с асинхронным короткозамкнутым двигателем, содержа1цкй тиристо)нь1й преобразователь частоты с автономным инвертором тока и выпрямителем с подключенным к его входу регулятором модуля тока, блоки прямого и обратного преобразо ваний координат блок преобрааовшГия переменных ,регулятор потокосцепления, регулятор скорости с подключенным на его выходе делительным устройством, датчики параметров машины, отличающийся тем, что, с цепью упрощения и повьпиения
надежности, в него введены два ингеграпьных регулятора активной и реактивной составляющих полного тока, один из которых подключен к выходу регулятора потокосцеппения, а другой к выходу депитепьного
устройства, при этом выходы обоих указанн интеграпьных регуляторов подключены ко входу блока прямого преобразования координат.
2. Электропривод по п. 1, о т л ичающийся тбм, что выходы регулятора потокосцепления и делительного yci ройства непосредственно подключены ко входам блока прямого преобразования ко фдинат.
3. Электропривод по п. п. 1 и 2, о т л ичающийся тем, что регулятор модул тока выполнен в виде пропорционального звена.
Источники информации, принятые во внимание при экспертизе:
1.Патент ФРГ №2144422, кл. 21 Ь 59/36, 1973.
2,Патент ФРГ №1941312, п. 21 с 59/36, 1971,jpi, 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU649114A1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Способ активного гашения магнитного шума электродвигателя и устройство для его осуществления | 2021 |
|
RU2769972C1 |