Изобретение относится к области электг родуговой сварки труб и стыков металлических листов, в частности, к производству труб большого диаметра. Наиболее близким техническим решением к данному изобретению является фотоэлектрическая следящая система, содержащая датчик, формирователь сигнала, измерительную схему, реверсивный усилитель и исполнительный механизм 1. Принцип работы системы заключается в следующем. Фотоэлектрический датчик устанавливается на корректоре сварочной головки таким образом, что когда электроды расположены над стыком, то оптическая ось датчика перпендикулярна к плоскости касательной поверхности свариваемого изделия по копирной линии. При этом фотоэлектрический датчик преобразует отраженный от копирной линии световой поток в электрический сигнал, характеризующий смещение его оптической оси от копирной линии в плоскости, касательной поверхности трубы по колирной линии. Так как датчик расположен на корректоре, то его смещение относительно копирной линии, соответствует смещению электродов относительно стыка свариваемого изделия. Сигнал от датчика усиливается усилите.лем, управляющим исполнительным механизмом корректора сварочных электродов. Срабатывание исполнительного механизма приводит к перемещению датчика в сторону уменьшения смещения оптической оси его относительно копирной линии, а,следовательно, и к уменьщению смещения электродов с линии стыка. Недостатком известной системы является то, что помехи, возникающие при появлении на поверхности металла в зоне копирной линии цйрапин и блестящих зачисток, приводят к сбоям в работе системы. Целью изобретения является повышение помехоустойчивости фотоэлектрической следящей системы при наличии царапин и блестящих зачисток в зоне нанесения копирной линии Поставленная цель достигается тем, что в фотоэлектрическую следящую систему, содержаихую датчик,формирователь сигнала, измерительную схему, реверсивный усилитель и исполнительный механизм, -введено устройство распознавания щирины копирной
линии, формирующее сигналы появления в зоне видимости датчика оптических помех tипa царапин и зачисток.
Принцип работы устройства распознавания ширины копирной линии основан на сравнении длительности сигнала на выходе датчика, соответствующего щирине этой копирной линии, с фиксироцанной длительностью вспомогательного сигнала.
На фиг. 1 изображена блок-схема, фотоэлектрической следящей системы с устройством распознавания щирины копирной линии; на фиг. 2 - временные графики сигналов устройства распознавания щирины ко,пирной линии.
Фотоэлектрическая следящая система содержит датчик 1, выход которого связан со входом форм ирователя сигнала 2. Выход формирователя 2 подключен ко входу из 1ерительной схемы 3, выходной сигнал которой поступает на реверсивный усилитель 4. Нагрузкой реверсивного усилителя является исполнительный механизм 5, перемещающий электрод и механически связанный с НИРЛ датик 1. Устройство распознавания ширины копирной (опорной) Л.ИНИИ 6 включено между выходом формирователя сигнала 2 и входом измерительной схемы. 3. Устройство 6 состоит из генератора импульсов калиброванной длительности 7, вход которого подключен к выходу формирователя 2, логического элемента «НЕ 8, вход которого также подключен к выходу формирователя 2, логического элемента «НЕ - 9, подключенного к выходу генератора 7, логической схемы «И - 10, один вход котЪрой подключен к выходу формирователя 2, а второй - к выходу логического элемента «НЕ - 9, временного элемента 11, подключенного входом к выходу логической схемы «И - 10, а выходом - ко входу измерительной схемы 3, логической схемы «И - 12, один вход которой подключен к выходу генератора 7, а второй вход - к выходу логического элемента «НЕ - 8, второго временного элемента 13, подключенного входом к выходу логи-. ческой схемы «И 12, а выходом - ко входу измерительной схемы 3.
Система работает следующим образом.
Выходной сигнал датчика 1 преобразуется формирователем сигнала 2 в прямоугольные импульсы с одинаковой амплитудой. Этот сигнал поступает в измерительную схему 3, которая через реверсивный усилитель 4 осуществляет включение исполнительного механизма 5, который в свою очередь перемещает электрод и связанный с ним датчик 1.
Сигнал, поступающий с формироват.еля. 2 в устройство распознания. 6, сравнивается по длительности с эталонным, соответствующим установленной щирине копирной линии. В случае появления на поверхности металла в зоне копирной линии царапин или блестящих зачисток, поступающие на вход устройства 6, сигналы будут отличаться по длительности. Если длительность этого сигнала больще длительности калиброванного импульса генератора 7 (фиг. 2, график 1, импульс при TC т|с), то устройство 6 работает следующим образом. Передним фрЪнтом сигнала запускается генератор 7, вырабатывающий импульс калиброванной длительности (фиг. 2, график 6).
При этом на выходе элемента «НЕ - 9 появляется инвертированный импульс (фиг. 2, график 2), а на выходе схемы «И - 10 появляется импульс длительностьютв - тс - Тк (фиг. 2, график 3). Вследствие этого, на выходе узла 11 появляется импульс (фиг. 2,
5 график 4), с регулируемой задержкой гтоах на срабатывание, соответствующей установленному допуску сигнала, поступающего на вход устройства 6 по максимуму ширины копирной линии. В случае, если этот сигнал
меньщей длительности, чем длительность импульсов генератора 7 (см. фиг. 2, график 1, при Тс TK ) устройство 6 работает таким образом. Передним фронтом сигнала, поступающего на вход устройстваб, запускается генератор 7, вырабатывающий импульс
5 (фиг. 2, график 6) калиброванной длительности TK , а на выходе элемента «НЕ - 8 появляется инвертированный входной сигнал (фиг. 2, график 5). В этом случае, на выходе схемы «И - 2 появляется импульс длительностью гд TK-Гс (фиг. 2, график 7). При этом на выходе узла 13 формируется им-. пульс с регулируемой задержкой на срабатывание по минимуму щирины копирной линии (фиг. 2, график 8).
С целью повышения помехоустойчивости
5 следящей системы, импульсы с выхода узлов 11 и 13 (фиг. 2, соответственно - графики 4 и 8) подаются на вход измерительной схемы 3 для формирования дополнительных команд управления исполнительным механизмом 5.
В случае Тс тк. на выходе устройства распознания щирины копирной линии б, импульсы отсутствуют (фиг.. 2, график 7 и 8).
Таким образом, устройство б вырабатывает сигналы лищь в то.м случае, если в пОле
5 видимости датчика 1 появляются паразитньге оптические объекты, сигналы от которых проходят через элементы 1 и 2 следящей системы. Для того, чтобы следящая система не отработала возмущений от этих оптических объектов, устройство 3 блокирует вход устройства 4 и режим слежения прерывается. Одновременно с этим, устройство 3 вырабатывает световой и звуковой сигналы для восприятия их оператором, который на период появления этой информации может вмещаться в работу системы и предотвратить брак продукции.
При случайном появлении оптических помех в зоне копирной линии, предотвращается выход датчика 1 из зоны поля видимости,,.
а значит, при исчезновении помех следящая система сможет продолжить автоматическое направление сварочного электрода относительно линии стыка объекта сварки.
- Следовательно, фотоэлектрическая следящая система позволяет производить электродуговую сварку труб в условиях появления на поверхности металла в зоне копнрной линии царапин и блестящих зачисток, приводящих к сбоям в работе системы.
Формула изобретения
Фотоэлектрическая следящая система, со держащая датчик, формирователь сигнала, измерительную схему, реверсивный усилитель и исполнительный механизм, отличающаяся тем, что, с целью повышения помехоустойчивости путем обеспечения контроля ширины копирной линии, между выходом формирователя сигнала и входом измерительной схемы включено устройство распознавания шириныкопирной линии, содержащее генератор импульсов калиброванной длительности, два логических элемента «НЕ, две логические схемы «И и два временных элемента, при этом выход формирователя сигнала соединен с входом первой логической схемы «И, входом второго логического элемента «НЕ и входом генератора импульсов калиброванндй длительности, выход которого соединен со входом второй логической схемы «И и входом первого логического элемента «НЕ, выход которого в свою очередь подключен к другому входу первой логической схемы «И, выход которой соединен посредством временного элемента с соответствующим входом измерительной схемы, вход второй логической схемы «И соединен с выходом второго логического элемента «НЕ, а выход - посредством другого временного элемента с соответствующим входом измерительной с,хеМЫ.
Источники информации, принятые во внимание при экспертизе
1. Львов Н. С. Автоматизация контроля и регулирования сварочных процессов, М., «Машиностроение, 1973, с. 72.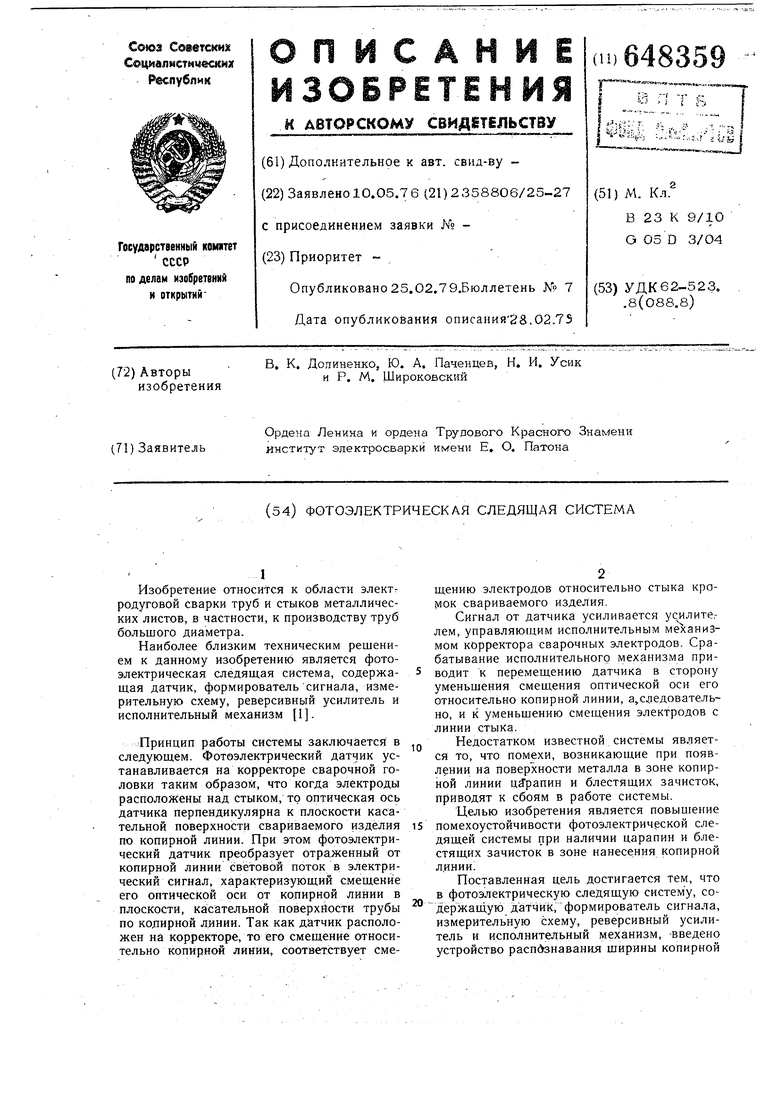
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОТОЭЛЕКТРИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1971 |
|
SU305442A1 |
| Устройство для управления следящим приводом | 1987 |
|
SU1442975A1 |
| Адаптивная следящая система | 1984 |
|
SU1288651A1 |
| Датчик стыка свариваемых кромок | 1978 |
|
SU694312A1 |
| Бесфрикционное намоточное устройство | 1989 |
|
SU1694470A1 |
| Устройство для останова трикотажной машины | 1988 |
|
SU1751235A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПОДКВАШИВАНИЯ МОЛОКА | 1991 |
|
RU2065618C1 |
| Система автоматического управления процессом подсквашивания молока в потоке при производстве кисломолочных продуктов | 1986 |
|
SU1479919A1 |
| Следящий привод | 1982 |
|
SU1012198A1 |
| Двухканальная следящая система | 1974 |
|
SU487375A1 |

