держит третий ключ и последовательно соединенные четвертый инвертор и четвертый ключ, соединенный выходом с выходом TpeTbeiX) ключа, а вторым В5содом -с первым вкодом третьего ключа,второй вход которого подключенк входу четвертого инвертора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085018C1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Устройство для регулирования колебаний | 1986 |
|
SU1429093A2 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Устройство для формирования сигнала рассогласования | 1985 |
|
SU1317394A1 |
| Фазовращатель к устройству неразрушающего контроля | 1986 |
|
SU1363051A1 |
| Аналого-цифровой преобразователь интегральных характеристик электрических величин | 1981 |
|
SU1035790A1 |
1. СЛЕДЯЩИЙ ПРИВОД, .содержащий задатчик скорости и последо-i вательно соединенные логический блок, первый ключ, сумматор, усилитель с корректирующтл устройством,исполнительное устройство, датчик положения и первый инвертор, отличающийс я тем, что, с целью расширения функциональных возможностей, повышения точности и надежности привода, он содер- жит формирователь импульсов, первый реверсивный счетчик, последовательно соединенные генератор линейно нарастающего напряжения, второй инвертор и второй ключ, последовательно соединенные второй реверсивный счетчик, сравнивающий элемент, третий инвертор, преобразователь код-аналог и схему реверса, подключенную выходом к втор( входу сумматора, вторым входом - к выходу преобразователя код-аналог, третьим входомк второму выходу сравнивающего элемента, соединенного первьтм выходом со входом преобразователя код-аналог, вторым входом - с выходом первого реверсивного счетчика, первый и второй входы которого подключены соответственно к второму и третьему выходам nori ческого блока, подключенного входом к выходу формирователя импульсов, четве1 тым выходе - к входу генератора линейно нарастающего напряжения, пятым вы- коцам - к второму входу второго ключа, выход которого соединен с выкзаом первого ключа, соединенного вторым входом с выходом генератора линейно нарастающего напряжения и с входом формирователя импульсов, первый и второй входы , (fl второго реверсивного счетчика соединены соответственно со вторьтм и треть.им выходами датчика положения, выход инвертора подключен к третьему входу & S сумматора. 2. Привод по п. 1, отличающий с J тем, что логический бпог. с.одержит последовательно соединенные первый элемент И, первый памяти и второй элемент И, последовательно соеhd диненные второй элемент памяти и третий элемент И и последовательно соедисо ненные элемент ИЛЙ-НЕ и элемент ИЛИ, 00 соединенный вторым входом с входом первого элемента И, с вторыми входами второго и третьего элементов И, выход первого элемента И подключен к входу второго элемента памяти, соединенного выходом с первым входом элемента ИЛИНЕ, второй вход которого подключенк выходу первого элемента памяти. 3. Привод по п. 1, о т л и ч а ю щ и и с я тем, что схема реверса со
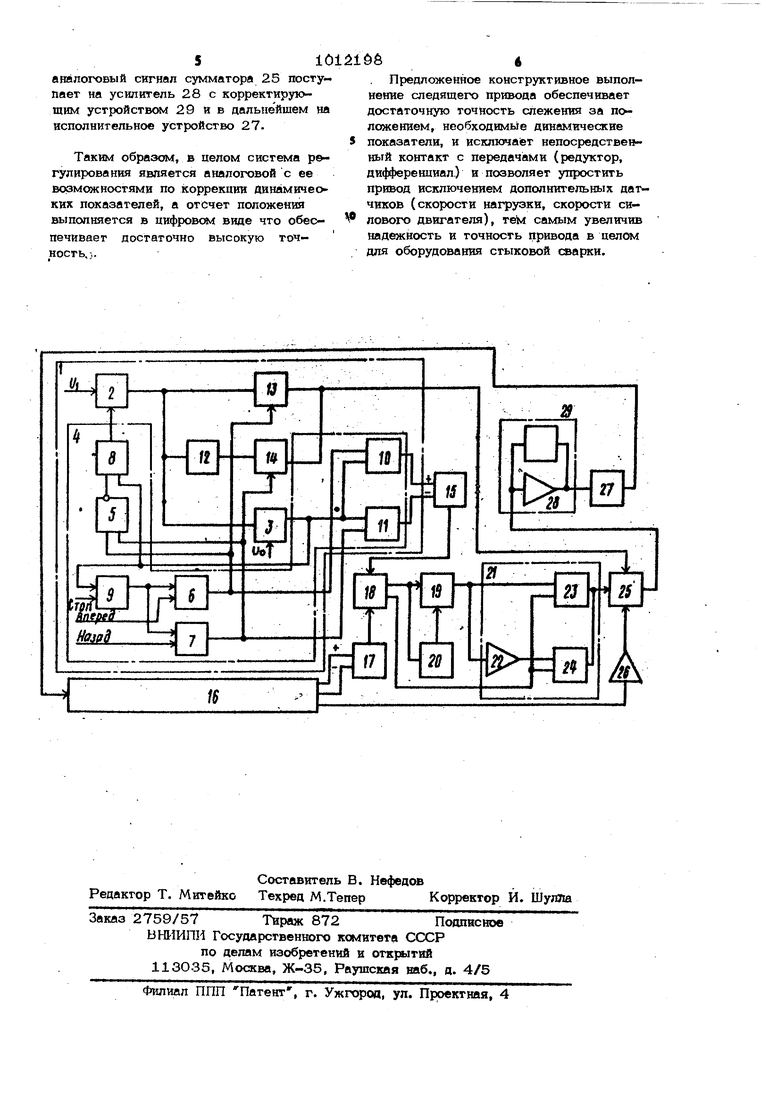
Изобретение относится к системам автоматического регулирования по пол« жению и может быть использовано в раз личных отраслях техники, преимуществе но в приводах тяжелых стыковых машин, где требуются весьма малые скорости и имеются значительные ударные нагрузки Известны цифровые следящие системы привода и аналоговые с датчиком положе ния или скорости в цепи обратной рвязиС1 иХ2. К недостаткам цифровых приводов сле дует отнести неравномерность движения привода при малых скоростях, а-также недостаточную динамическую точность. (Аналоговые приводы характеризуются недостаточной точностью слежения за положением, а также их дрейфами при весьма малых скоростях в системах D обратной связью по скорости. Наиболее близким к изобретению . техническим решением является следящий привод, содержащий задатчик скорости и последовательно соединенные логический блок, первый ключ, сумма тор, усилитель с корректирующим устройством, исполнительное устройство, датчик положения и первый инвертор 3 J. К недостаткам указанного привода следует отнести низкую надежность и точность в приводах, например электрогвдравлическом, стыковых машин, особенно на малых скоростях, при наличии , ударов, воздействующих на исполнительно устройство. Цель изобретения - расширение функ7 ииональных возможностей, повышения точ ности И надежности привода. Для достижения цели привод содержит формирователь импульсов, первый реверсивный счетчик, последовательно соединенные генератор линейно нарасггающего напряжения, второй инвертор и второй,ключ, последовательно соединенные второй реверсивный счетчик, сравнивающий элемент, третий инвертор, пр 5образователь код-аналог и схему реверса, подключенную выходом к второму входу сум матора, вторым вкопам - к выходу преобразователя код-аналог, третьим вхоаом - к ътораму выходу сравнивающего элемента, соединенного первым выходом со вторым входом преобразователя коданалог, вторым входом - с выходом первого реверсивного счетчика, первый и второй входы которого подключень соответственно к второму и третьему выходам логического блока, подключенного вкоасм к выходу формирователя импульсов, I четвертым выходом - к входу генерато линейно нарастающего напряжения, пятым выходом - к второму входу второго ключа, выход которого соединен с выходом первого ключа, соединенного вторым входом с выход(Я4 генератора линейно нарастающего напряжения и с входе формирователя импульсов, первый и второй входы второго реверсивного счетчика соединены соответственно с вторым и третьим выходами датчика положения, первого инвертора подключен к трет1гему входу сумматора. Кроме того, логический блок следящего привода содержит последовательно соединенные первый элемент И, первый мент памяти и второй элемент И, последовательно соединенные второй элемент памяти и третий элемент И и последовательно соединенные элемент ИЛИ-НЕ и элемент ИЛИ, соединенный вторым входом с входом первого элемента И, с вторыми входами второго и третьего элементов И, выход первого элемента И подключен к входу второго элемента памяти, соединенного выходом с первым входом эпемента ИЛИ-НЕ, второй вход которого подключен к выходу первого элемента памяти. Помимо этого, схема реверса следящего привода содеркит третий ключ и последовательно соединенные четвертый и вертор и четвертый ключ, соединенный выходом с выкоаам третьего ключа, а вторым входом - с первым входом третьего ключа, йторой вход которого подключен к. входу четвертого инвертора 310 На чертеже приведена структурная схема следящего првводаС Следящий привод содержит задатчик 1 скорости, генератор 2 линейно нарастак шего напряжения, форм1фоватепь 3 импульсов, логический блок 4, элемент 5ИЛИ-НЕ, первый ап&лент памяти 6, второй эл«лент памяти 7, элемент ИЛИ 8 первый элемент И 9, второй элемент И Ю, третий элемент И 11, второй И№вертор 12, первый клк 13, второй клю 14, первый реверсивный счетчик 13, датчик 16 положения, второй реверсивны .счетчик 17, сравнивающий элемент 18, , преобразователь 19 кодг-аналог, третий инвертор 2О, схему 21 реверса, четвертый инвертор 22, третий ключ 23, чету. вертый ключ 24, сумматор 25, первый инвертор 26, исполнительное устройство 27 и усилитель 28 с корректирующим устройстве 29. Привод работает следующим образом. После подачи сигнала Вперед ЕЯШЮчается первый элемент 6 памяти, открылi вает первый ключ 13 и через элементы i 5 ИЛИ-НЕ и 8 ИЛИ дает разрешение ; работы генератора 2 линейно на|)астающв го напряжения, и напряжение на его вы-, ходе начинает увеличиваться. При дост жешш этим напряжением значения И фо я«{ирователь 3 импульсов формирует-. импульс, которыйчерез второй эп&леуе 10 И поступает на сум1ушрующий вход первого реверсивного счетчика 15. Одно временно импульс формирователя ;3 импульсов через эремевт 8 ИЛИ сбрасывае выходное напряжение генератора 2 п№нейво нарастающего напряжения в нуль. При повторн. достижении напряжения на выходе генератора 2 линейно нараотающего напряжения уровш (Jo никл формирования импульса и сброса повторяется. Таким образом, на аналоговом выходе задатчика 1 скорох ги получаемся линейно 1ирастающее напряжение, а на суммирующем вь.ходе появляются импуль сы. При подаче сигнала Стоп в момент формирсжання импульса формирователем 3 импульсов через первый эле мент 9 И сбрасывается первый элемент 6памяти Вперед, а на выходе генератора 2 линейно нарастающего напряжения устанавливается нулевой уровень. При подаче сигнала Назад включается второй элемент 7 памяти и аналогично формирукугся нмпульсы на хычитакяцем выходе эадатчика 1 скорости. При вкпюченнн второго элв«1ента 7 памяти откры 8 вается второй ключ 14 и на аналоговый задатчика 1 скорости проходит ложительное напряжение с в:ы хода инвертора 12, являющееся линеЙнО убыван им. От датчика 16 положения при дввжешга вперед импульсы поступают на суммирующий вход второго реверсивного счетчика 17, при движении назад - на вычитающий вход этого счетчика. Значения счетчиков 15,17 вычитаются вым сра1вниваю1 тм элементом 18, бапрв- мер две младщие декады поступают на преобразователь 19 код-аналог; в случае, если число на входе преобразователя 19 код-аналог более его максимального значения, то инвертор 2О переводит пр& образователь 19 код- аналог в состояние его наибольшего выходного напряжения. Это напряжение поступает на-первый вход схемы 21 реверса; Если разность цифровых значений кодов, сравн эающего элемента- -полсжительная, то открывается третий ключ 23 схемы 21 реверса, и ви выход ее поступает положительное напряжение. Если рас ность отрицательная, то открывается четвертый ключ 24 скемы 21 реверса, н на выход ее поступает от ринательное , напряжение инвертора 22. Это напряжение поступает на перязый вход сумматора 25, на второй вход которого поступает аналоговое напряжение задатч ка 1 скорости, а на третий вход поступает аналоговое отрицательное напряжевио от датчика 16 положения через инвертор 26, Таким образом, та выходе сумматора появляется аналоговое напряжение, равное сумме разности кодов реверсивных счет чиков 15 и 17 и разности аналоговых сигналов задатчика 1 скорости и датчика 16 положения. Причем первая разность представляет разность цифровых кодов, которая может быть 1 1поанена точно, если емкость реверсивных например, 15 и 17 10, а преобраз(жасчетчиковние в код-аналоге (шится в двух младших декадах, погрешность цифроавен логового преобразователя, например, 1О, то оши&са в определении разности равна , что является недостижимым, ДЛЯ аналоговых устройств. Однако в прег делах днскретности цифровых сигналов в цифровых систолах всегда будет ошибка, равная дискретности, в данном случае она равна 1О от всего перемещения. Наличиеаналоговых, сигналов в предепак дискретности от задатчика 1 скорости и датчш 16 положения позволяет свести .ату к минумуму. Выходной
анилоговый сигнал сумматора 25 поступает на усилитель 28 с корректирук щим устройством 29 и в дальнейшем на исполнительное устройство 27.
Таким образом, в целом система регулирования является аналоговой с ее во1зможностями по коррекции динамичео ких показателей, а отсчет положения выполняется в цифровом виде что обеспечивает достаточно высокую точность.;,.
Предложенное конструктивное выполнение следящего привода обеспечивает достаточную точность слежения за положением, необходимые динамические показатели, и исключа(ет непосредстве ный контакт с передачами (редуктор, дифференциал.) и позволяет упростить привод исключением дополнительных датчиков (скорости нагрузки, скорости силового двигателя), геК« самым увеличив надежность и точность привода в целом для оборудования стыковой сварки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| А. Д. ПОДЛИННОЕ и Е. С. Заводий, ^^-о:з^;/пя !->& плтгип'з-^; ГН;^;:;;!^---"- 1 Б:;5л;а;:- | 0 |
|
SU328430A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и др | |||
| Промышпенгные автоматические регуляторы | |||
| М., Энергия, 1973, с | |||
| Способ пропитывания дерева | 1925 |
|
SU418A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| (прототип). | |||
