I
Изобретение относигея к следшцим приводам и может быть использовано npk проектировании след5пцих приводов различных объектов с большим диапазоном регулирования по скорости, к которым пре дъявляются повышенные требования по точности иппавносги движения при работе на малой скорости.
Известен следящий привод, обеспечивающий плавность при отработке малых скоростей путем перенастройки в этом режиме, содержащий последовательно включенные задающее устройство, блок сравнения, усилитель, силовой привод, со единенный с датчиком обратной связи и тахогенератором l . Этот следящий привод для увеличения илавности работы на малых CKOpocTstx содержит управляемый нелинейный элемент, первый .вход, которого Соединен с выходом тахогенера- тора, второй - с источником опорного напряжения, управляющий вход подключен к выходу усилителя, а выход связан со входом сумматора.
Наиболее близким по технической сущности к изобретению является следящий привод, содержащий последовательно соединенные задатчик, блок сравнения, пер-г вый переключатель, усилитель в последовательно соединенные исполнительный механизм и датчик обратной связи, выход которого соединен со вторым входом блока сравнения, а вход - с нагрузочным элементом 2 .
Однако известные приводы отличаются сложностью и малой статической точностью.
Цель изобретения - увеличение статической точности и упрощение привода.
Это достигается тем, что привод содержит последователыю соединенные второй переключатель и блок ограничения, выход которого соединен со входом исполнительного механизма и через второй переключатель с выходом усилителя.
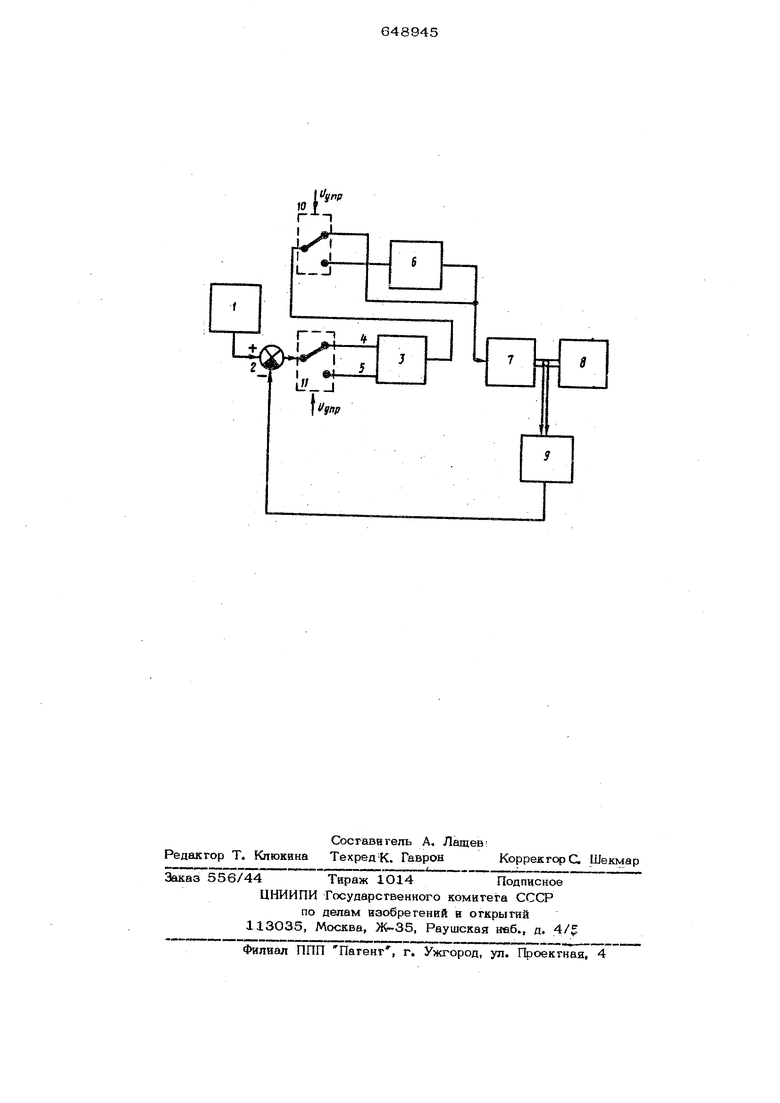
На чертеже дана структурная схема предлагаемого следящего привода.
Привод содержит задагчнк 1, блок 2 сраввенгш, усилигепь 3 с двумя входами 4 к 5, блок 6 огракйчення, исполннгепьный механизм 7, связанный с нагрузочным элементом 8 и датчиком 9 обратно связи, и два переключагеляЮ н 11. Блок 6 ограничения подключен к выходу усилителя 3 через первый переключатель 10. Входы усилителя 3 подключены к йыходу блока 2 сравнения через второй переключатель 11. Вход 5 обеспечивает больший коэффициент передачи усилителя 3 по сравнению со входом 4.
Следящий привод действует следующим образом.
При работе в режиме отработки входных воздействий с ноктанальными скоростями привод работает как обычный сле дятдий привод. Через нормально замкнутые контакты, гтэре ключа тел ей Ю и 1,1 соогветсгвенно выход усилителя 3 под- штючб ко входу исполнитёльного механизма 7, а вход. 4 усилителя 3 подключен к блоку 2 сравнения. При переходе на режим отработки медленно меняющихся входных воздейсгвий яо сигналу yftp. первый переключатель 10 под-. ключает к выходу усилителя 3 блок 6 ограничений, сигнал с которого поступаег Ни вход исполнительного механизма 7, а второй переютючатель 11 переключает блок 2 сравнения с входа 4 на вход 5 усилителя 3, обеспечивающий больший Еоэффициент передачи.
Блок 6 ограничения ограничивает велйчину управляющего сигнала, поступающего на вход исполнительного механизма 7, т.е, ограничивает величину максимальной скорости посиеднего. Благодаря этому привод сохраняет устойчивость при большем коэффициенте передачи, а повышение коэффидиента передачи
И ограничение максимальной скорости исполнительного механизма 7 приводит к повышению точности как в динамике, так и в статическом режиме, и плавное5 ги движения привода при отработке малых скорсогей. Очевидно, что величина зоны ограничения должна выбираться большей, чем зона нечувствительности исполнительного механизма 7. ® Введение ограничения при увеличении коэффициента передачи привода позволяет повысить точностьгпривода в 2,5 раза при плавной отработке малых скоростей.
Формула изобретения
Отедящий привод, содержащий последовательно соединенные задатчяк, блок сравнения, первый переключатель, усилитель и пбСледователкно соединенные исполнительный механизм и датчик обратной связи, выход которого соедЕнен со вторым входом блока сравнения, а бходс нагрузочньгм элементом, о т л и ч а Ю ш и и с. я тем, что, с целью увепичвгния статической тошости и упрощения
. привода, он содержит последовательно соединенные второй переключатель и блок ограничения, выход которого соединен со входом исполнительного механизма и через второй переключатель - с
35 выходом усилителя.
Источники информации, принятые во внимание при экспертизе
1.Емельянов С. В. и др. Системы д с переменной структурой. М., Наука ,
197О, с. 15.
2.Авторское свидетельство СССР
№ 354399, кл. О5 В 13/ОО, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1980 |
|
SU881667A2 |
| Следящая система | 1981 |
|
SU987577A1 |
| Следящая система | 1981 |
|
SU1001008A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| Следящая система | 1981 |
|
SU962847A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| Следящая система позиционирования | 1981 |
|
SU962842A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
1ФГ
