Изобретение относится к системам автоматического управления переключением комбинированного управления и может быть использовано при управлении летательными аппаратами, объектами электротехники, технологическими процессакш и т.д. Известна следящая система, содержащая последовательно соединенные из меритель рассогласования, усилитель мощндсти и исполнительный механизм, выход которого соединен с одним из входов измерителя рассогласования, а через последовательно соединенные тахогенератор, форсирующее устройство - с вторым входом усилителя, выход 1 змерителя рассогласдван11я через последовательносоеданенные пороговый элемент и формирователь импульса соединен с управляклдим входом форсирующего устройства Cl . Недостатками; данной системы является ее сложность. Известна также следящая система, содержащая последовательно соединен ные измеритель рассогласования, усилитель-ограничитель, усилитель, усилитель мощности и исполнительный механизм, выход которого соединен с одним из входов измерителя рассогласования и входом датчика скорости, выход которого через первый функциональный преобразователь соединен с вторым входом усилителя, через первый пороговый блок - с первым входом первого элемента И, а через второй функциональный преобразователь - с первым входом компаратора, выход измерителя рассогласования соединен с вторым входом компаратора и через второй пороговый блок - с вторь входом первого элемента И и первым входом второго элемента И, второй вход которого соединен с выходом компаратора и входом элемента НЕ, а выход - с вторым входом первого функционального преобразователя, выход элемента НЕ соединен с третьим входом первого элемента И, выход которого соединен с третьим, входом первого функционального преобразователя U 2 3. Недостатком этой системы является ее сложность. Наиболее близкой ;к предлагаемой по технической сущности является следящая система, содержащая последовательно соединенные измеритель рассогласования, усилитель, переключатель, усилитель мощности и
исполнительный механизм, выход которого соединен с вторым входом измерителя рассогласования, выход которого через пороговый блок соединен с первым управлякадим входом переклю;чателя, через- усилитель-ограничитель с вторым сигнальным входом переключателя, через блок сравнения - с вторым управляющим входом переклю- 1чателя, датчик нагрузки через соглаСующий преобразователь соединен с вторым входом усилителя мощности, второй выход, которого через тахогенератор соединен с вторым входом блока сравнения и вторым входом усилителя 3.
Недостатком известной системы является, ее сложность.
Целью изобретения является упрощение системы.
Поставленная цель достигается тем, что в следящей системе, содержащей измеритель рассогласования, через пороговый блок подключенный выходом к первому управляющему входу переключатель, а через блок сравнения - к второму управляющему входу переключателя, усилитель, первым входом подключенный к выходу датчика скрости и к второму входу блока сравнения , а выходом - к первому входу усилителя мощности, вторым входом через согласуквдий преобразователь подключенного к выходу датчика внешней нагрузки, а выходом - к входу исполнительного механизма, подключенного выходом к второму входу измерителя рассогласования и к входу датчика скорости, сигнальные входы переключателя подключны к первому входу и выходу измерителя рассоглсования, а выход - к второму входу усилителя.
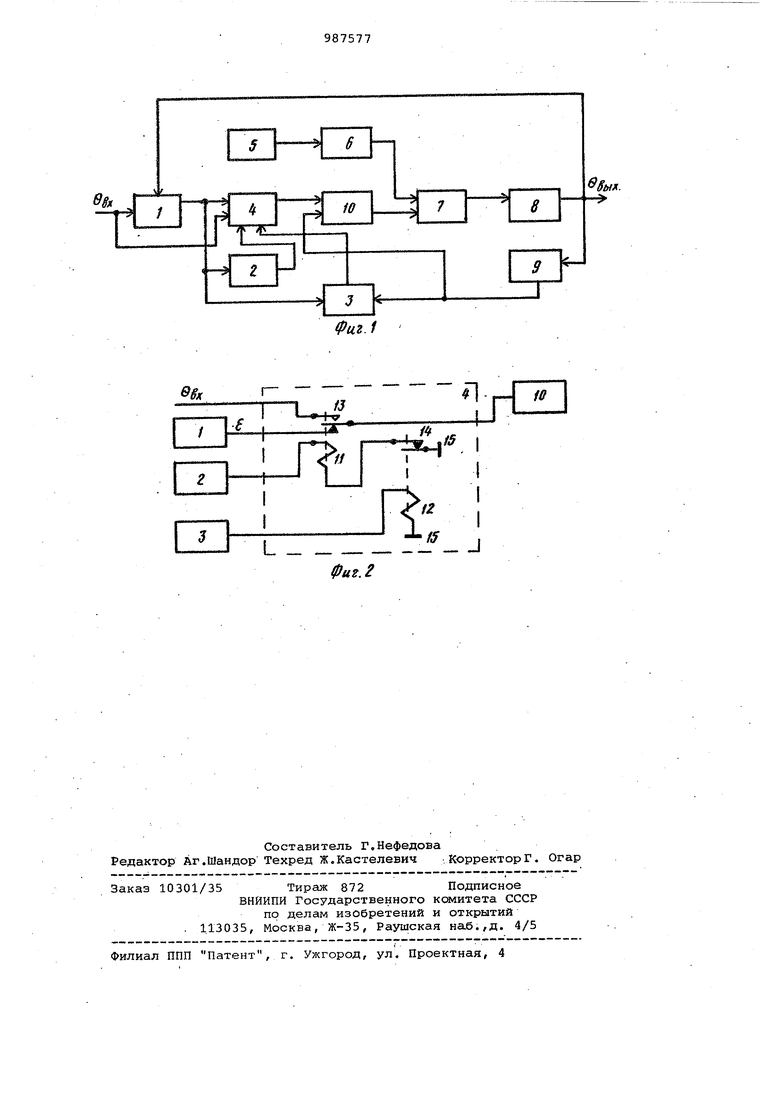
На фиг, 1 дана блок-схема системы;; на.фиг.2 - принципиальная схема переключателя. Следящая система содерияст измеритель 1 рассоглаооваНИН, пороговйй блок 2, блок 3 сравнения, переключатель 4, датчик 5 внешней нагрузки, согласующий преобразователь б, усилитель 7 мощности исполнительный механизм 8, датчик 9 скорости, усилитель 10, реле 11 и 12 контакты 13 и:14, общую шину 15. Qg, Qgj,,E- соответственно, входной, выходной сигналы и сигнал рассогласования системы.
Предлагаемая система работает следующим образом.
Сигнал рассогласования 6 с выхода измерителя 1 рассогласования, т азный-Q gbin разности выходного сигнала 3g, исполнительного устройства 8 и входного сигнала SBX поступает на входы порогового блока 2, блока 3 сравнения и переключателя 4. Пороговый блок 2 выдает сигнал и, на первый управляющий вход переключателя 4, если модуль сигнала рассогласования е превышает порог срабатывания Upop порогового блока 2, т.е. при lEI Urjopj блок 3 сравнения сравнивает величину сигнала рассогласования с выхода измерителя 1 рассогласования и величину сигнала с выхода датчика-9, характеризующего скорость изменения выходного сигнала и выдает сигнал Uj для управления вторым управляющим входом переключателя 4.
Переключатель 4 по .сигналу с по;рогового блока 2 отключает от второго входа усилителя 10 сигнал 6 и подает на этот вход сигнал61 ;, а по сигналу с блока 3 сравнения, момент -выдачи которого зависит от величины соотношения сигналов -uj , произ-водит обратное переключение. Усилитель 10 имеет большой коэффициент усиления и два входа: один по сигналу с выхода переключателя 4, второй по сигналу отрицательной обратной связи и с датчика 9 скорости, причем сигнал 1о подается на вход усилителя 10 для стабилизации следящей системы. Усилитель 7 -мощности управляет исполнительным механизмом 8. Датчик
9вырабатывает сигнал, величина которого пропорциональна скорости отработки W выходного сигнала . Усилитель 7 мощности имеет дополнительный вход для сигнала компенсации внешней нагрузки. Этот сигнал поступает через согласующий преобразователь б от датчика 5 внешней нагрузки (например, гидроскопа, реагирующего на изменение положения платформы,
где расположена система ).
При работе следящей системы с малыми рассогласованиями , т.е. вблизи установившегося значения, пороговый блок 2 не выдает сигнал Uj на переключатель 4 и на вход усилителя 10 с выхода переключателя 4 подается синал Е, т.е. система работает в обычном режиме. В этом случае усилитель
10и усилитель 7 мощности усиливают сигнал 6. и на выходе усилителя 7
мощности формируется сигнал(&-изJK K-, который управляет исполнительным устройством 8 таким образом, что.бы сигнал рассогласования .стремился к нулю.
Обеспечение высокой точности отработки входного сигнала и быстродействия системы при больших рассогласованиях осуществляется отключение сигнала е от входа линейного усилителя 10 и подачей на его вход сигнала . Йвх при значениях .больших, чем порог; срабатывания Uf,opi порогового блока 2; Такое переключение сигнала на входе усилителя 10 с е на ®вх приводит к насыщению усилителя 1 который имеет большой коэффициент
силения, и усилителя 7 мощности, читывая, что в неустановившемся реиме Qg . На выходе усилителя 7 ощности получается постоянный и. аксимальный ,по амплитуде сигнал.при значениях Qexfизменяющих свою веичину от малых значений, до максиальных, чтовызывает работу.-исполнительного механизма 8 с максимальной скоростью и ускорением в переодном режиме. .Обратное переключение сигналов на входе усилителя 10 при выбранном соотношении сигналов е, Е- UJ производится, когда система приближается к установившемуся значению.
Таким образом, обеспечение высоofi точности и быстродействия в переходном режиме осуществляется работой следящей системы с максимальной скоростью и ускорением при больших рассогласованиях по сигналу ошибки по скорости, и работой системы в линейном режиме при малых, рассогласованиях, при значительной величине сигнала рассогласования g. пороговый блок 2 выдает сиг нал на переключатель 4, который подает на вход усилителя 10 сигнал 64 , обеспечивающий работу усилителя в режиое ограничения. Обратное подключёние сигнала обеспечивается сигналом с выхода блока 3 сравнения, который вьщает сигнал Uj при определенном соотношении величин сигналов рассогласования и скорости отработки.
Параметры усили.теля 10, порогового блока 2 и блока 3 сравнения выбираются таким образом, чтобы подача сигнала вход усилителя 10 вызыва ла работу усилителя в режиме ограни-чения, а обратное включение сигнала Ё происходило при режиме ограниче- ния усилителя 10, что исключает работу системы на линейном участке при наличии на входе линейного усилителя сигнала Яц.
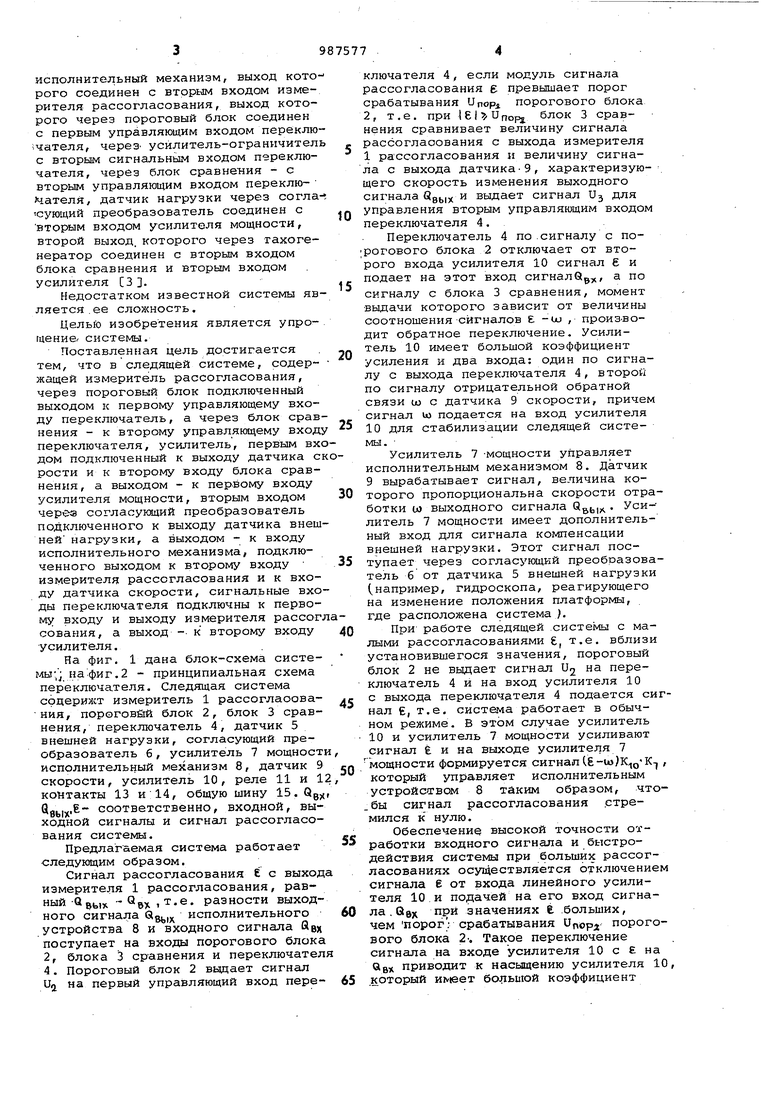
Один из вариантов выполнения переключателя 4 приведен на ,фиг. 2 и ра ботает следующим образом.
В установившемся режиме или при малых рассогласованиях сигналы на выходах блокрв 2 и 3 отсутствуют, реле. 11 и 12 переключателя 4 обесточены, контакты реле находятся в положении, указанном на фиг. 2, и сигнал Е проходит с выхода измерителя 1 р)ассогласования на вход усилителя 10 и следящая система работает в линейном .режиме.
В переходном режиме при наличии сигнала, вызывающего срабатывание порогового блока 2, последний выдает сигнал и / вызывающий срабатывание реле 11 переключателя 4, размыкание контактов 13 реле 11 по сигналу е, и замыкание - для сигнала Qgy . Сигнал Qэхпоступает на вход усилителя 10 и вызывает насыщение
системы и отработку следящей системой входного сигнала с максимальной скоростью и ускорением.
Когда на входе блока 3 сравнения, . сигнал - W достигнет величины,
при которой вьщается. сигнал Uj,
последний вызывает срабатывание реле 12, размыкание контактов 14 этого реле, обесточивание обмотки реле 11, размыкание верхних контактог н зг.мыкание нижних, контактов 13 реле. 11 и прохождение сигнала Б с выхода измерителя 1 рассогласования на вход усилителя 10, переход этого усилителя и всей следящей системы в линейныйрежим работы.
Использование изобретения позволит упростить следящую систему за счет исключения усилителя-ограничителя на входе усилителя мощности, что при-г
ведет к повышению надежности,
сокращению времени на настройку и ;улуч111ение технологичности.
Формула изобретения
30
Следящая система, содержащая измеритель рассогласования, через порого вый блок подключенный выходом к первому управляющему входу переключате35ля, а через блок сравнения - к второму управляющему входу переключателя, усилитель, первым входом подключенный к выходу датчика скорости и к второму входу блока.сравнения, а выходом 40к первому ВХОДУ усилителя мсяцности.
вторым входом через согласующий преобразователь подключенного к вы-. ходу датчика внешней нагрузки, а выходом - к входу исполнительного механизма, подключенного выхо;цом к второму входу измерителя рассогласования и к входу датчика скорости, отличающаяся тем, ,что, с целью упрощения системы, в ней
сигнсшьные входы переключателя пбдключены к первому входу и выходу измерителя рассогласования, а выход к второму входу усилителя.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 482716, кл. G 05 В 11/01,-. 1973.
2.Авторское свидетельство СССР № 673979, кл. G 05 В 11/01, 1977.
3. Авторское свидетельс.тво СССР № 378798, кл. G 05 В.11/12, 1971 Спрототип). .
Фиг, 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU1001008A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Следящая система | 1983 |
|
SU1166056A2 |
| Следящая система с ограниченным углом поворота выходного вала | 1989 |
|
SU1783469A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| Программный регулятор | 1978 |
|
SU744468A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU378798A1 |