Целью гфедлагаемого изобрегения яв лвегся расшярение обпасги. применения усгройсгва.
С)тцносгь иэобрегенйя заключаегса в том, по устройство содержит блок оравиення, первый а второй регистры кодов границ нелинейности и регистр кода изменяемого napaNiBTpa, первый я второй входы блока сравнения соеаинены соогвегсгвенир с пятым, выход ом блока управ леиия и.выходом первого преобразователя кода в напряжение, а его выход соединен с четвертым входом блока управпения, входы регистров кода границ нелинейности соедИЕШНы с шестым и седьмым выходами блока управления, а их выходыс четвертым н пятым входами блока вычисления координат, выход регистра кода изменяемого параметра соединен с пятым входом блока управления,
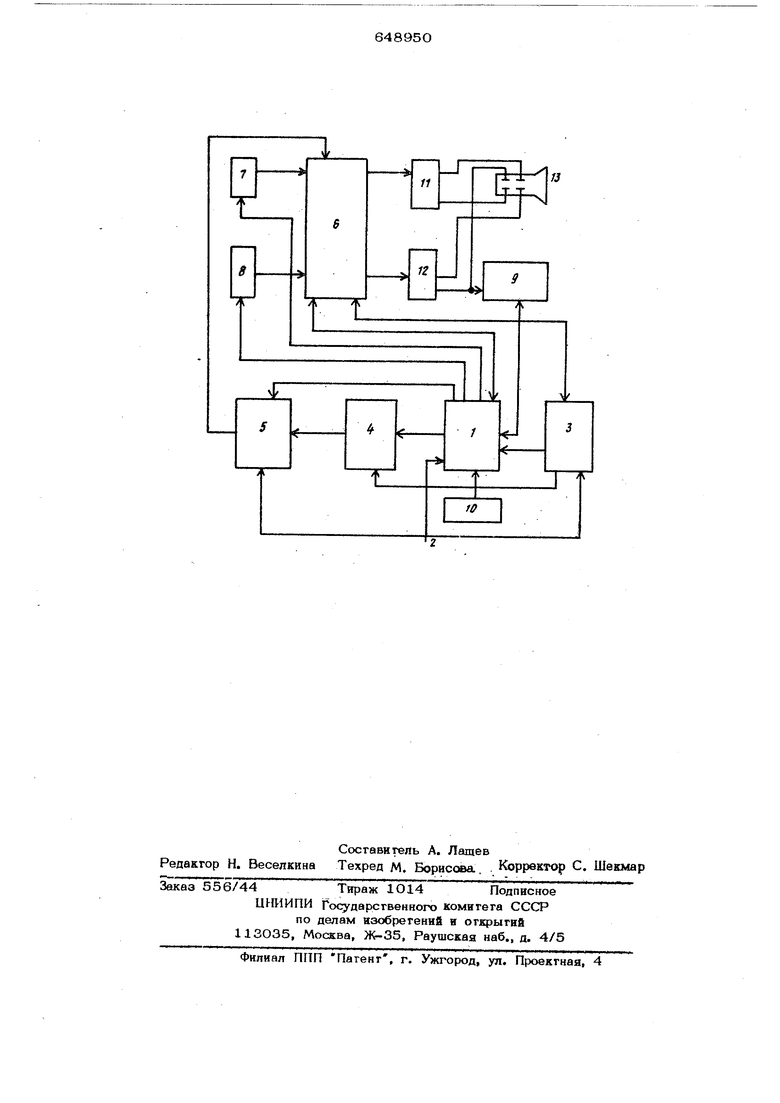
Струю-урная схема устройства приведена на чертеже;, блок управления 1 соединен с шиной запуска 2, с арифметическим блоком 3, с блоком постоянной памяти 4 и блоком оперативной памяти 5, с блоком вычисления координат 6, с первым и вторым регистрами кодов границ нелинейности 7,8, с блоком сравнения 9, с регистром кода изменяемого парамет ра 10, Арифметическийблок 3 соединен с блоком постоянной памяти 4, блоком сперативиой памяти 5 и блоком вычисления координат б. Блок оперативной памяти 5 соединен с блоком постоянной памяти 4 и блоком вычисления координат 6, который соединен с первым и вторым регистрами кода границ нелинейности 7, 8 и через преобразователикода в напряжение 11,12 с электроннолучевой трубкой 13 и блоком сравнения 9.
В основу работы устройства положен следующий алгоритм. Нелинейная система с расположением нелинейности в секторе ( об , /5 - границы не линeйнocти и передаточной хара1сгеристи- кой Линейной части W (р ) при наличии входного сигнала i (t Т будет устойчива TQM случае, если корневой годограф кругового образа линейной часта системы будет расположен в левой полуплоскоо ти колшлексной плоскости , т.е. не пвресе«кает мнимой оси й. На основании фазового и амплитудного критериев Сгрелкова 3ванса вьшеден геометрический критерий принадлежности точки комплексной
ПЛОС1СОСТИ корневому годографу крутобо- го образа, который имеет вид;
и sin 2
р.
(П
Bsiviy
sin }f+ aHctg
где и и определяются из амплитудного; н фазового критериев Стрелкова-Эванса и
п /
Л V
.iU (21
tn
Л &«Ьд8
i
тд(з;
Е ancttf-.У
(5)
AS; °
1
где Л(л)4,А8, Д(А)|, A5j -разности ординат и абсцисс исследуемой точки
, Плоскости и ординат, абсцисс полюсов и нулей соответственно, первдаточ11ой функции системы управления. Значения И и В определяются через значения границ нелинейности o(j и р .
Таким образом, нелинейная система при наличии входного сигнала будет исследоваться следукщим образом. Точки комплексной плоскости, начиная из по-
люсов системы, по уравнению (1) будут исследоваться на принадлежность корневому годографу кругового образа. Если при этом координата точки будет принадлежать оси , то система .неустойчива. Для нахождения,.параметров устойчивой системы можно изменять границы нелинейности .,/51 или варьируемые полюса и нули передаточной функции линейной части системы.
Перед началом работы устройства в блоке постоянной памяти 4. записаны
Qrcid углов, в блоке оперативной памяти координаты полюсов и нулей, в регистрах кода границ нелинейности 7,8 об и Р . По сигналу запуск блок управления 1 вырабатывает сигналы для чтения координаты первого полюса W . , S jr . которые из блока определения памяти 5 поступают в блок вычисления координат 6. НачинаетсяСлежение вокруг этой точки. Для этого исследуется окрестность полюса, начиная с точки ,р+&С), а затем в цнюте вычисляются значения &5 и л). По формуле (3) вычисляются значения у , для чего в арифметическом блоке 3 находятся значения АОЭ/д5 , из блока постоянной памяти 4 читаются значениясЯРСГЬй Tg и происходит суммирование в ари етическом блоке 3. Значение у хранигся в блоке оперативной памяти 5. Затем вычисляется значение И по формуле (2), дпя четх в цикле происходит умножение, сложение, извлечение корня и умножение для вычисления произведений вида
и RJTi sjThb.
о
Значения oi и и пересылаются в арифметический блок 3, затем в блоке вычисления Координат 6 определяются значения р и и) и записываются в блок оперативной памяти 5. В арифметическом блоке 3 реализуется вычисление уравнения (1) и сравниваются левая и правая часть в блоке вычисления координат 6. Если оьИ равны, координаты исследуемой точки передаются на экран электроннолучевой трубки 13, а абсцисса в сравнения 9. Если абсцисса равна нулю, то блок сравнения Q посылает сигнал в блок управления 1. В регистре кода изменяемого параметра 10 хранится код параметра, который можно варьировать. Происходит чтение кода варьируемого параметра из блока оперативной памяти 5 в арифметический блок 3, если это полюс или нуль, или из регистра кода границ нелинейности 7(8) (из РКГН}, если это oi или р . В арифметическом блоке 3 происходит- изменение параметра.
Если при построении ветвей корневого годографа первая ветвь не пересеюта ось J 60 , то происходит построение второй ветви, и т.д. В случае, если ни одна ветвь не пересекла мнимую ось, параметры линейной части при расположении нелинейности в заданных границах (старых или нзменениых) такие, что нелинейная система устойчива при наличии входного сигнала, т.е. говорят об устойчивости процессов нелинейной системы. Если прк данном варьируемом параметре нелнкей ная система автоматического управления неустойчива, надо изменить код параметра в регистре кода изменяемого параметра 1О. После построения корневого годографа устойчивой нелинейной системы автоматического управления последний выдается на экране эле1сгроннолучевой фубки 13.
При исследованиях линейных систем ветви корневого годографа строятся по уравнению (3).
Эффект от использования данного уст ройства заютючается в том, что исследуются на усгоЭчивосгь не только линейные
системы, но и нелинейные. Кроме того, находятся параь1етры нелинейных систем, при которых они будут устойчивы.
Формула изобретения
Устройство для определения устойчивости систем управления, содержащее блок управления, первый, второй, третий и четвертый выходы которого соединены соответственно с первыми входами арн4 метического блока, блока постоянной памяти, блока оперативной памяти и блока вычисления координат, первый, второй, третий входы блока управления соединены соответственно с шиной; за пуска,/первыми выходами арифметического блока и блока вычисления координат, второй, третий и четвертый выходы арифметического блока соединены с вторыми вхсдами блока постоянной памяти, блока оперативной памяти и блока вычисления координат, выход блока постоянной памяти соединен с третьим входом блока оперативной памяти, второй шыход которого соединен с третьим входом блока вычисления координат, третий и четвертый выходы которого через соответствующие преобразователи кода в 1апряжен 1е соединены с ОТКЛОНЯЮЩИМИ плacrи;нa и электроннолучевой трубки, отличающее.-, с я тем, что, с целью расширения области применения, устройство содержит блок сравнения, первый и второй регистры кй- дов границ нелинейности и регистр кода изменяемого параметра, первый и второй входы блока сравнения соединены соответственно с пятым выходом блока управления н выходом первого преобразователя кода в напряжение, а его выход сое динен с четвертым входом блока управления, входы регистров кода границ нелинейности соединены с шестым и седь-мым выходами блока управления, а нх выходы - с четвертым и пятым входами блока вычисления координат, выход регистра кода изменяемого параметра соедине ii с пятым входом блока управления.
Источники ир1формаини, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 169898, кл. q OS В 23/00, 1963.
2.Авторское свидетельство СССР
№ 275545, кл, Q Об F 15/О6, Q Об Р 15/2О, 1970.
3.Авторское свидетельство СССР № 4О8313, кл. Q Об Р 15/31. 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления корневых годографов систем автоматического управления | 1977 |
|
SU660058A1 |
| Устройство для вычисления корневых годографов систем автоматического управления | 1981 |
|
SU987584A1 |
| Устройство для отображения графи-чЕСКОй иНфОРМАции HA эКРАНЕ элЕКТРОН-HO-лучЕВОй ТРубКи | 1973 |
|
SU807358A1 |
| Устройство для определения областейАбСОлюТНОй уСТОйчиВОСТи | 1979 |
|
SU811270A1 |
| Устройство для вычисления корневыхгОдОгРАфОВ СиСТЕМ АВТОМАТичЕСКОгОупРАВлЕНия | 1979 |
|
SU830395A1 |
| УСТРОЙСТВО для ВЫЧИСЛЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УНРАВЛЕНИЯ1Изобретение относится к автоматике и телемеханике и предназначено для исследования динамических свойств систем автоматического управления.Известны устройства для построения корневых годографов систем автоматического управления, содержащие вентили, группы вентилей, блоки памяти, схемы ИЛИ, схемы задержки, схему сравнения, сумматор, выходы которого соединены с первыми входами одноименных вентилей первой и второй групп, первый регистр, выходы которого соединены с первыми входами соответствующих вентилей третьей группы, второй регистр, выходы которого соединены с первыми входами одноименных вентилей четвертой и пятой групп, первый счетчик, выходы которого соединены с первыми входами одноименных вентилей ще- стой и седьмой групп, второй счетчик, выходы которого соединены с первыми входами одноименных вентилей восьмой и девятой групп, триггеры и генератор импульсов.Однако известные устройства имеют недостаточное быстродействие, невысокую точность работы и ограниченные функциональные возможности. | 1973 |
|
SU408313A1 |
| Устройство для моделирования размещения плоских геометрических объектов | 1982 |
|
SU1200295A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU397914A1 |
| Устройство для определения оптимальных траекторий | 1983 |
|
SU1223240A1 |
| Двухкоординатная система программного управления | 1980 |
|
SU938264A1 |