(54) ЭЛЕКТРОГ1РИйОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1980 |
|
SU1059647A2 |
| Электропривод | 1980 |
|
SU955484A2 |
| Электропривод | 1983 |
|
SU1100702A2 |
| Электропривод | 1983 |
|
SU1179511A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Электропривод | 1976 |
|
SU649116A1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Система управления процессом термообработки синтетического волокна | 1977 |
|
SU731419A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
I
Изобретение относится к электротехнике. а именно к системам точного электропривода переменного тока, построенных на частотно-фазовом принципе стабилизации скорости, и может быть использовано в установках с низкими скоростя.ми движения рабочего органа, требуюпхих повышенной стабильности при широком диапазоне регулирования.
По основному авт. св. № 649 16 известен электропривод, содержащий машину двойного питания, одна обмотка которой подключена к преобразователю регулируемой частоты, управляемому от задаюш.его генератора, и схемы управления, включающей корректирующее устройство и фазовый детектор, другая обмотка подсоединена к источнику возбуждения (сети переменного тока, либо преобразователю, управляемому от задаюн.,его генератора постоянной частоты), а третья обмотка является измерительной и размещена в рабочем зазоре машины, су.мматор, входы которого подключены к измерительной об.мотке и к датчику тока возбуждения машины, а выход сумматора соедине) с входом фазового детектора, при этом 1змеритель2
.- обмс./ка до;1ол1;итсльно соединена с другим «ходом фазового детектора |1.
.iocTaTKOM этого устройства является низкая точность .задания разности частот питания обмоток машины, а следонательно, низкая точнос1ь стабилизации средней скорости э.тектропр1{вода. В дар.иом устройсгвс точность задания частоты 1И-1тания одной оомотки определяется стабилыостью выходной частоты задающего генератора, а для зторш -- стабильностью частоты сети переменного тока, которая даже для объединен10ных энергосистем равна ±0,2Vo- Таким обp;J3OM, частоты питания обмоток машины .задаются от двух i:e нзаимокоррелировапных iicroi.HHKOB. Скорость вращения машины двойного питания
13
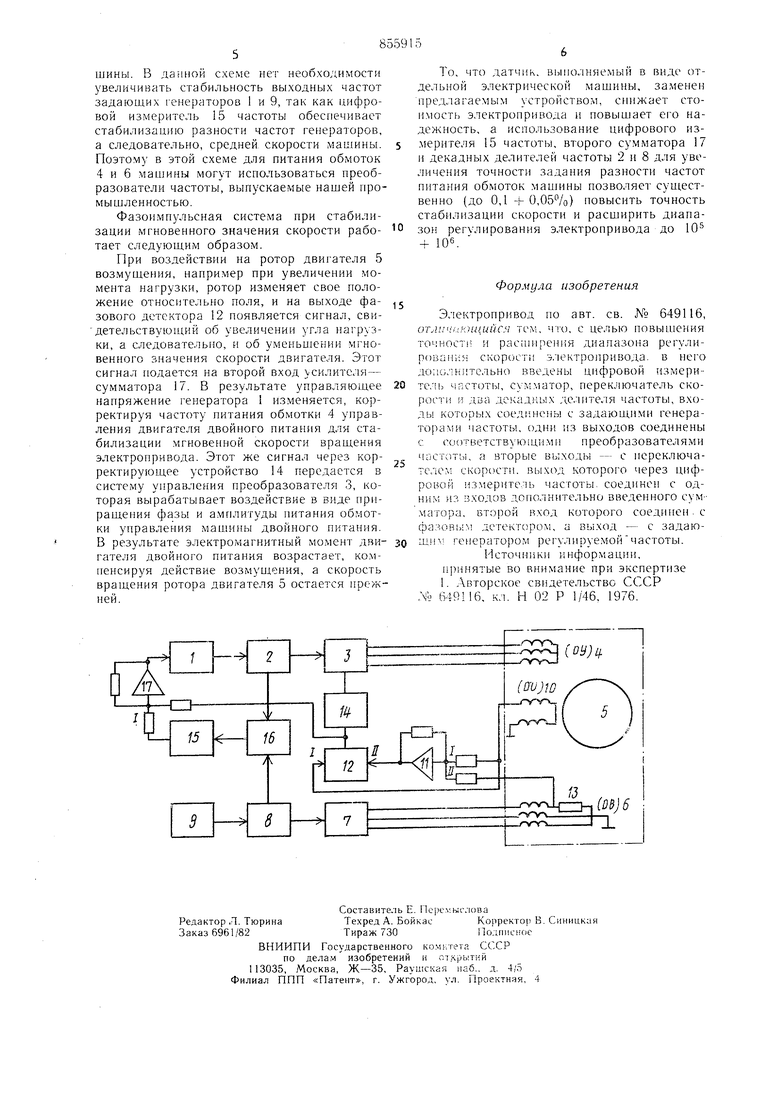
(U
- 2ji(f ,- г)А. иитаьгия обмоток маI. и f, А
lijHHbi;
- безразмерный коэффициент, определяемый принципом дейс п;,я и конструкцией машины (равный числу пар полюсов, лп6(5 числу зубцов ротора). Л.-f Af.:- f uf .+ uij. с i f,±ii 1, гле(, и iJ относитель.:::. пестабилы-юсти пшчшия ;юл1ОГ| м а ш и н ы. Принимая 6 I if , что );i;ii;;; ЛИБО для задания )т (гг одного )л тора, имек)иег(; JIB;: и:-5а:1мо 1;р)ел |101:;;-;: ных ЗЫлОда, получи.м Таким образом, кз выражений (оj и ;;) видно, что для обеспечения минимальной iir;грешности задания средь1ей скор(к:т,1 Maiiii-iны необходимо, чтобы частоты интапия обмоток задавались от двух изаимокоп х;лкрованных источников, в нротизнслу; случае norpeHJHOCTb задания скороети ои1)сде.1ястСИ суммой нестабильностей частот лмтапия обмоток магнины. Цел1 изобретенная - позьинсмик UJHHOсти стаби;п- 3ации н |) дианаз-И ;. регулирования скорое™ электропрязо;:,а avтем уве;н-1че} ия точност -; задания пазшктн частот питания обмоток ,1 Л1к;Й1; ;г() питания. Цель достигается тем, что в нз сстпый электрон ри вод доно.тнительно ;.иед,сны ал i ;,)ровой измеритель частоты, суммато,;, переключатель скорости и два декадных делителя частоты, входы которых с задаюпдими генераторами частоты, одн из выходов соединены с соответствукяцими преобразователями, частоты, а вт(;р;,е выходы - - с нерек,тючателем скорости. В1,1хол, которого через цифровой измеритель частоты соединен с одним из вхо.чов доно.мнительно введенного сумматора, второ; вход которого соединен с фазовым детекторо-м, а выход --- с задаюни1м генератором ,1ируемой частоты. Такое устройство позволяет сун1,естзенп(; увеличивать точноеть задания разностн частот нитания обмоток ман1ины двойно ;о нитания за счет обеспечения их взаимокоррелированности, реализует обратную связь но мгновенным колебаниям скорости маншны с воздействием на частоту пита1-н я обмоткн управления машины, что нозводяет повысить точность стабилизации за.данногс значения скорости, а следовате,;1ьно, расн1ирить диапазон ре1Ллировання скоростн электропривода. - : ,- :;() i-;:,,-.;-: г,Л:о о. t, :-..ini;e iHi;My С обмот: :.: : ,.:;:;;:.:. i; а:;;; п);: CiiiixpoHi-ioio оедук; :|-а::|; .Ч.;;м ;jTc.,iЯ П ;;.1Ч И1{огг: нитания. (36;;;:;,: ; it:: .Г--. ;.;.;л ci П i Г (())) ,.;ЬИ1; ТеЛЯ НОДi..:.:.:::: ч 1м:- :()раз(л;ате.лк) , KOT(jpbm (; ;v. o;;;ij u.iKa.uibai дс,::; е.1ь fi частоты сое;;,::;-: . .5а, ;.ai, MiUiM )a iOjjCiM 9 постоян;:-.;й : :ir-;-(, . .4; ;:Ca;:.;,;:, J.lii iHHOiO 1НГГаНИЯ Г; ..i.: ; :;vu-Pi:T(Mb: ;ji: ,юм(;ткой (OH) i 0, ii: ;;;u;i:c 4i:;:. к; j.--;; .-iiOciH.s обмотки 6. Н,|;-:(/д i.;0 ::мкi; 10 fи;;.мea с нходами CVMviap-jia ;i i; va3oiK;yo дд т1-;-:тО(Х5 2. Jlpyroft jxo.i cvr-Ma I Oj;;: 1 п;.);.:,ч,1Юче;1 к aixTJiBHOwy (.liiiiixriiikijiaiK 13 в а.спи oG iOTKa 6. a иых(.)д ;VMMa ooa к ( д.( Tci-iTooy 12. {1)азово о детектора 2 соединен с кг)рр(,им устройствол ;4 cxeMiji уп;)апл;лп : 1пеобразовате..1ел; 3. В схему элек1ча)1:рмв1)да .т.1я овьлиеиия очности задания paiHocTii частоГ : 1Г -ания обмоток 4 и 6 зве/цл пи(|1)овой измеритель 15 часточт н входы KoTopoio через va-ioroHO.iKJCHbiH перек;11о--1ате.;ь И) ;-кг)роети оедиие {; с выходами .:|СКад11ых делителей 2 и 8 -аедоты. со 15ЧО.аол; jT ;poro сч мматора /, выход коTufiOi;; coe.THHcii с заj.aioLHi-iN; iCiepaiopOM 1 1е;, частот;. Л, реа.лизащ-ги обратной связи ао Mraoi5C4iHi);M ка.;ебаниям скоросги viainaabi 1;торой яхо;: cvM:v:aTopa 17 соедапе с выходом (};азов(:;го .:итектора 12. - в ;лод;.)) декад о;:) дел1ггеля Н частот1з1 сна .аичс:;: и подает см аа цифрового измсг);| 4-.ia in час1-оты носледователыюсть irviii льсс -;. сооIBeiCiaivioniaH требуемой выходной частот)- задающего енератора 9, а с ныходо дска.лного л.елителя 2 частоты па вход.;л If) через )(лк)чатель 16 скорости нодаетси 1 0следо15ате.1ьаоеть ямгчльсов, соответстн ао111а ; требV:мой вьнходпой частоте задак.) .снератора 1 регулируемой часToTiii. ВьХодпая част(;та оп нме: иегся величиной i 3i;aKOM у|;ран.ляклне1о напряжения, аостунаюн его от цифрового из.мерителя 15 часл-оты через уси..л|1тел| -- е Л1матор 17. Элект1)онри вод фун кционн рует следу образом. При отклоне1 ии выходных частот задающих генераторов 1 н 9 от заданных поелел.,оваге,лгл1остсй импульсов с декадных десштелей 2 и 8 приходят на из.меритель 15 частоллл )аз1-1овре.мен1- о и в результате на его выходе появляется напряжение, пропорцио1 альпое отклонен1 Ю частот, взаимодейcTByioHiee на задакллнй генератор 1 таким образом, чтобы обес 1ечить заданную разность частот питании обмоток .машины, а с.ледовале;П)Но, и иеобходим ло точность стабилизац1 н среднего значения скорости машины, в данной схеме нет необходимости увеличивать стабильность выходных частот задаюидих генераторов 1 и 9, так как цифровой измеритель 15 частоты обеспечивает стабилизацию разности частот генераторов, а следовательно, средней скорости машины. Поэтому в этой схеме для питания обмоток 4 и 6 машины могут использоваться преобразователи частоты, выпускаемые пашей иромышленностью. Фазоимпульсная система при стабилизации мгновенного значения скорости работает следуюшим образом. При воздействии на ротор двигателя 5 возмущения, например при увеличении .момента нагрузки, ротор изменяет свое положение относительно поля, и на выходе фазового детектора 12 появляется сигнал, свидетельствую1ций об увеличении угла нагрузки, а следовательно, и об уменьшении мгновенного значения скорости двигате.ля. Этот сигнал подается на второй вход усилителя- сумматора 17. В результате управляющее напряжение генератора изменяется, корректируя частоту питания обмотки 4 управления двигателя двойного питания для стабилизации мгновенной скорости врашения электропривода. Этот же сигнал через корректируюшее устройство 14 передается в систему управления преобразователя 3, которая вырабатывает воздействие в виде ирирашения фазы и амплитуды питания обмотки управления машины двойного питания. В результате электромагнитный момент двигателя двойного питания возрастает, ко.мпенсируя действие возмущения, а скорость вращения ротора двигателя 5 остается прежней. То, что датчик. В1)П10лняемый в виде отдельной электрической машины, заменен предлагаемым устройством, стоимость электропривода и повышает его надежность, а использование цифрового измерителя 15 частоты, второго сумматора 17 и декадных делителей частоты 2 и 8 для увеличения точности задания разности частот питания обмоток машины позволяет существенно (до 0,1 + 0,05%) повысить точность стабилизации скорости и расширить диапазон регулирования электропривода до 10+ 106. Формула изобретения Электропривод по авт. св. № 649116, OTAt;4iiK)U{UUCi тем, что, с целью повышения ТОЧНОСТ1-; и рас;11ирен1 я диапазона регулир()ван;-:.ч скорости з.1ектропривода. в него дополнительно введены цифровой измеритель частоты, сумматор, переключатель скорости и два декадных ;1е;1ите.1я частоты, входы которых соединены с задающими генераторсП и частоты, одни из выходов соединены с соответствую цим и преобразователями чосг(5ты, а вторые выходы - с иереключателс cKopocTii. выход которого через цифровой измеритель частоты, соединен с одним из входов дополнительно введенного сумматора, второй вход которого соедииен.с фалов);м детектором, а выход - с задаюLUii ; генератором регулируемойчастоты. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР ,NO 649116, кл. Н 02 Р 1/46, 1976.
