Достигается тем, что при способе связанного автоматического регулирования весового соотношения руда - вода и вязкости гидросмеси барабанных мельниц, включающем задание весового соотношения руда - вода и вязкости, измерение весовых расходов руды и воды, измерение вязкости и изменение расхода воды в загрузку, перед изменением раехода воды в загрузку осуш,еетвляют вычисление ио измеренному весовому расходу руды среднего весового расхода руды за ноеледовательные нромежутки времени равной длительности и разности между средним весовым расходом руды и заданным весовым соотношением руда - вода, но величине которой изменяют расход воды в загрузку, причем параллельно с процессом изменения расхода воды в загрузку производят изменение заданного весового соотношения руда - вода в обратно проиорциональной зависимости от разности измеренной вязкости гидросмеси и ее заданного значения.
Кроме того, устройство для осуш,ествления предлагаемого способа, содержаш,ее задатчики весового соотношения руда - вода и вязкости, датчики весовых расходов руды и воды, датчик вязкости, модулятор, усилители, блок сравксния сигналов соотношения руда - вода и регулятор подачи воды, соединенный через магнитный усилитель и исполнительный механизм подачи воды с рабочим органом, снабл ено блоком сравнения сигналов вязкости, исполнительным механизмом задатчика соотношения, интегриру1ош,им элементом, блоком запоминания, формирователем регулируюш,их воздействий, комаидно-временным блоком, коммутируюш,ими элементами периодического сброса интегрального сигнала, запоминания предыдупдего интегрального сигнала, формирования регулирующих воздействий и управления исполнительным механизмом задатчика соотношения. При этом датчик весового расхода руды через первый усилитель соединен с первым входом интегрирующего элемента, выход которого через модулятор нодключен к первому входу блока запоминания, соединенного с первым входом блока сравнения сигналов соотношения, второй вход которого подключен к выходу задатчика весового соотношения, а выход - к регулятору подачи воды. Датчик весового расхода воды через второй усилитель подключен к первому входу задатчика весового соотношения, второй вход которого соединен через иеполнительный механизм задатчика соотношения с выходом коммутирующего элемента управления исполнительного механизма задатчика соотношения, первый вход которого через формирователь регулирующих воздействий соединен с выходом коммутирующего элемента формирования регулирующих воздействий, первый вход которого подключен к выходу блока сравнения сигналов вязкости, входы которого нодключены к датчику и задатчику вязкости. Командно-временной блок соединен с вторыми входами коммутирующих элементов периодического сброса интегрального сигнала, запоминания предыдуи,его интегрального сигнала, формирования регулирующих воздействий и управления исполнительным механизмом за10 датчика соотношения, а выход коммутирующего элемента периодического сброса интегрального сигнала соединен с вторым входом интегрирующего элемента, выход коммутируюш.его элемента запоминания 15 предыдущего интегрального сигнала - с вторым входом блока запоминания.
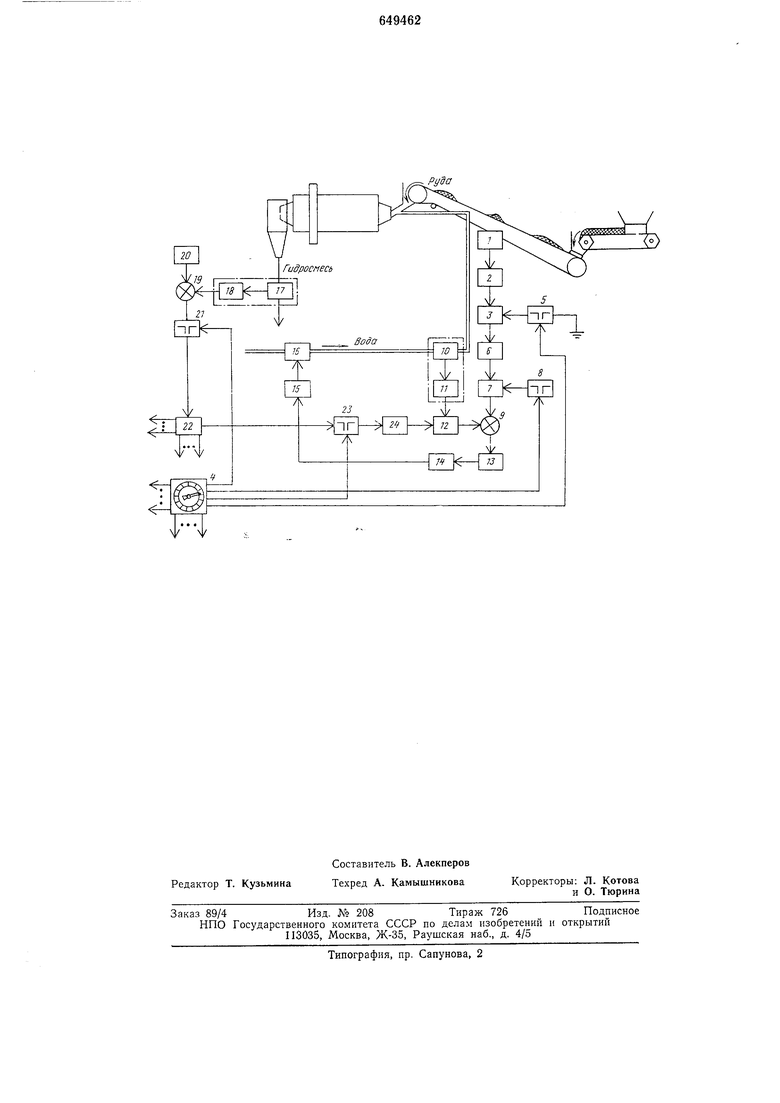
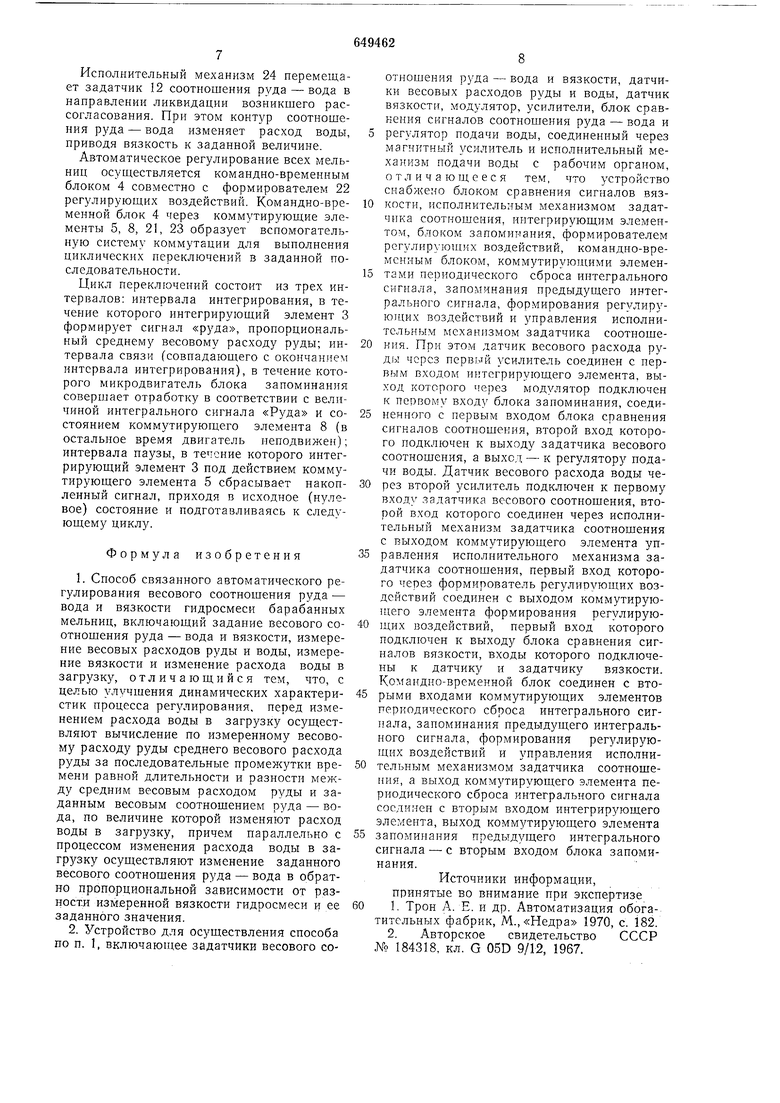
На чертеже представлена функциональная схема многоканальной электрической системы связанного авторегулирования ве20 сового соотнощения руда - вода и вязкости гидросмеси барабанных мельниц.
Способ многоканального связанного авторегулирования весового соотношения руда - вода и вязкости гидросмеси барабан5 ных мельниц осуществляют следующим образом.
С noMOHi,biu инюгратора постоянного тока в измерительном канале «руда каждой мельницы формируют периодически в не0 прерывной последовательности сигнал «Руда, пропорциональный среднему весовому расходу руды за фиксированные поеледовательные промежутки времени равной длительности. Одновременно формируют мгно5 венный сигнал весового расхода воды и непрерывно сравнивают оба сигнала с учетом заданного их соотношения, выявляя разность сигналов, демпфируют результирующий сигнал. При рассогласовании воздейст0 вуют исполнительным механизмом на рабочий орган (кран), изменяя расход воды в мельницу. При этом формируют мгновенный сигнал вязкости гидросмеси в сливе мельницы и периодически сравнивают сиг5 нал вязкости с сигналом задатчика вязкости, оиределяют и демпфируют разностный сигнал и при паличии рассогласования периодически воздействуют через исполнительный механизм контура авторегулирования 0 вязкости каждой мельницы на задатчик весового соотношения руда - вода, изменяя задание регулятору соотношения в соответствии с качественной характеристикой измельчаемой руды. 5
Устройство многоканального связанного авторегулирования весового соосношения руда - вода и вязкости гидросмеси для группы барабанных мельниц включает два 0 контура автоматического регулирования: контур автоматического регулирования весового соотношения руда - вода на входе мельниц и контур автоматического регулирования вязкости гидросмеси слива барабанных мельниц.
Первый контур автоматического регулирования весового соотношения руда - вода содержит два кана.та; канал «руда и канал «вода, посредством которых формируется сигнал воздействия на регулирующий элемент.
Канал «руда содержит датчик 1 весового расхода руды, к выходу которого присоединен усилитель 2 для усиления (неред интегрированием) слабого сигнала датчика 1 и его выпрямления; нагрузкой усилителя является интегрирующий элемент 3, например / С-звено, управляемое командно-временным блоком 4 посредством коммутирующего элемента 5 периодического сброса интегрального сигнала. К выходу интегрирующего элемента 3 подключен модулятор 6, преобразующий сигнал постоянного тока «руда в сигнал переменного тока.
Модулятор 6 в свою очередь подключен к блоку 7 запоминания, управляемому командно-временным устройством 4 через коммутирующий элемеит 8 запоминания иредыдущего интегрального сигнала. Блок 7 запоминания подключен к блоку 9 сравнения сигналов соотнощения.
Число каналов «руда равно числу мельниц.
Канал «вода включает датчик 10 расхода воды, к выходу которого подключен усилитель 11, соединенный в свою очередь с задатчиком 12 весового соотношения руда - вода потенииометрического типа, а выход последиего подключеи к блоку 9 сравнения сигналов соотиошения, снабженному встроенныл) демпфером для отфильтровывания пульсаций сигнала датчика «вода и способному воспринимать сигналы ностоянного и переменного тока.
Цепь регулирования первого контура содержит регулятор 13 подачи воды, подключенный к выходу блока 9 сравнения сигиалов соотнощения. К выходу регулятора 13 подачи воды подключен магнитный усилитель 14, выход которого подключен к исполнительному механизму 15 подачи воды, подсоединенному к рабочему органу (крану) 16.
Второй контур автоматического регулирования вязкости гидросмеси слива барабанных ме.лькии содержит датчик 17 вязкости, к его выходу подключен усилитель 18, последний подключен к блоку 19 сравнения сигналов вязкости, с которым соединены задатчик 20 вязкости и коммутирующий элемент 21. Блок 19 сравнения сигналов вязкости подсоединен к формирователю 22 регулирующих воздействий, к выходу которого через коммутирующий элемент 23 управления исполнительным механизмом задатчика соотнощения, также управляемый командно-временным блоком 4, подключен исполнительный механизм 24 задатчика соотношения.
Устройство для осу1Т1ествления способа многоканального связанного автоматического регулирования весового соотнощения руда - вода и вязкости слива группы барабанных мельниц работает следующим образом.
В первом контуре автоматического регулирования весового соотнощения руда - вода происходит непрерывный контроль
расхода зоды в мельницу в соответствии с заданным ссотиошением и текуихим средкпм весовым расходол руды.
При иарущении заданного весового соотиоигеиия руда-вода датчика 10 расхода
воды вырабатывает сигнал, сзидетельствующьй об отклокекии расхода воды от задаииого соотиощения величины. Снгнал «вода поступает на усилитель 11 и далее на задатчик 12 весового соотношения.
1 весового расхода руды вырабатывает сигнал, пропорциональный мгновенному весоволгу расходу руды, который усиливается в усилителе 2 до необходимой величины, и затем поступает на интегрируюпи-п элемент 3, где формируется сигнал , пропорциональный среднему весовому расходу руды за фиксированный промежуток времени. С выхода интегрирующего элемента сигнал постоянного тока поступает па модулятор 6, в котором усиливается, преобразуется в сигнал переменного тока и подается п б.лок 7 запом 1иания.
Загомииапио величины предыдущего интегрального | гнпла на вес и 1тервал формирования последующего сигнала осундествляется остановкой микроэлектродвигателя блока 7 заиомпнания посредством размыкания одной из обмоток двигателя коммутирующим элемеитом 8 кoмaнднo-вpe teипого блока 4 в момент окончания формироВЯ1П1Я предыдущего ст гнала.
Сигналы датчиков 1 и 10 непрерывно сравниваются в блоке 9. При рассогласовании регулятор 13 формирует импульсы, поступаюпие через магнитный усилитель 14
на исполнительный механизм 15, который
перемещает рабочий орган 16 до момента
ликвидации ошибки рассогласования.
Во втором контуре автоматического регулирования вязкости гидросмеси слива барабанных мельниц датчик 17 вязкости вырабатывает сигнал, величина которого .noHci.ibHa вязкоетн ги. на выходе мельницы. Затем сигнал поступает на
усил1 тель 18. с выхода которого - на блок 19 сравнения сигналов вязкости, где сравнивается с сигналом задатчика 20 вязкости. Сигнал рассогласования через коммутирующий элемент 21, управляемый командно-временным блоком 4, поступает на формирователь 22 регулирующих воздействий, который .;е челез коммутирующий элемент 23, управляемый кол1андно-временным блоком 4, воздейетг -ет на исцолнительный
механизм 24.
Исполнительный механизм 24 перемещает задатчик 12 соотношения рзда - вода в направлении ликвидации возникшего рассогласования. При этом контур соотношения руда - вода изменяет расход воды, приводя вязкость к заданной величине.
Автоматическое регулирование всех мельниц осуществляется командно-временным блоком 4 совместно с формирователем 22 регулирующих воздействий. Командно-временной блок 4 через коммутируюш:ие элементы 5, 8, 21, 23 образует вспомогательную систему коммутации для выполнения циклических переклгочений в заданной последовательности.
Цикл переключений состоит из трех интервалов: интервала интегрирования, в течение которого интегрирующий элемент 3 формирует сигнал «руда, пропорциональный среднему весовому расходу руды; интервала связи (совпадающего с окончанием интервала интегрирования), в течение которого микродвигатель блока запоминания совершает отработку в соответствии с величиной интегрального сигнала «Руда и состоянием коммутирующего элемента 8 (в остальное время двигатель неподвижен); интервала паузы, в течение которого интегрирующий элемент 3 под действием коммутирующего элемента 5 сбрасывает накопленный сигнал, приходя в исходное (нулевое) состояние и подготавливаясь к следующему циклу.
Формула изобретения
1. Способ связанного автоматического регулирования весового соотнощения руда - вода и вязкости гидросмеси барабанных мельниц, включающий задание весового соотнощения руда - вода и вязкости, измерение весовых расходов руды и воды, измерение вязкости и изменение расхода воды в загрузку, отличающийся тем, что, с целью улучщения динамических характеристик процесса регулирования, перед изменением расхода воды в загрузку осуществляют вычисление по измеренному весовому расходу руды среднего весового расхода руды за последовательные промежутки времени равной длительности н разности между средним весовым расходом руды и заданным весовым соотношением руда - вода, по величине которой изменяют расход воды в загрузку, причем параллельно с процессом изменения расхода воды в загрззку осуществляют изменение заданного весового соотнощения руда - вода в обратно пропорциональной зависимости от разностл измеренной вязкости гидросмеси и ее заданного значения.
2. Устройство для осуществления способа по п. 1, включающее задатчики весового соотношения руда - вода и вязкости, датчики весовых расходов руды и воды, датчик вязкости, модулятор, усилители, блок сравнения сигналов соотнощения руда - вода и регулятор подачи воды, соединенный через магнитный усилитель и исполнительный механизм подачи воды с рабочим органом, отличающееся тем, что устройство снабжено блоком сравнения сигналов вязкости, исполнительным механизмом задатчика соотнощения, интегрирующим элементом, блоком запоминания, формирователем регулирующих воздействий, командно-временным блоком, коммутирующими элементами периодического сброса интегрального сигнала, запоминания предыдущего интегрального сигнала, формирования регулируЮ1ЦИХ воздействий и управления исполнительным механизмом задатчика соотнощення. При этом датчик весового расхода руды через первый усилитель соединен с первым входом интегрирующего элемента, выход которого через модулятор подключен к первому входу блока запоминания, соединенного с первым входом блока сравнения сигналов соотнощения, второй вход которого подключен к выходу задатчика весового соотнощения, а выход - к регулятору подачи воды. Датчик весового расхода воды через второй усилитель подключен к первому входу я а датчика весового соотнощения, второй вход которого соединен через исполнительный механизм задатчика соотношения с выходом коммутирующего элемента управления исполнительного механизма задатчика соотнощения, первый вход которого через формирователь регулиоующих воздействий соединен с выходом коммутирующего элемента формирования регулирующих воздействий, первый вход которого подключен к выходу блока сравнения сигналов вязкости, входы которого подключены к датчику и задатч ику вязкости. Командно-временной блок соединен с вторыми входами коммутирующих элементов периодического сброса интегрального сигпала, запоминания предыдущего интегрального сигнала, фордтировання регз лирующих воздействий и управления исполнительным механизмом задатчика соотношения, а выход коммутирующего элемента периодического сброса интегрального сигнала соединен с вторым входом интегрирующего элемента, выход коммутирующего элемента
запоминания предыдущего интегрального сигнала - с вторым входом блока запоминания.
Источники информации, принятые во внимание при экспертизе
1. Трон А. Е. н др. Автоматизация обогатительных фабрик, М., «Недра 1970, с. 182. 2. Авторское свидетельство СССР № 184318, кл. G 05D 9/12, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| Устройство автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1979 |
|
SU787311A1 |
| Устройство для регулирования двухстадийного цикла измельчения | 1973 |
|
SU487670A1 |
| Способ автоматического регулированиязАпОлНЕНия бАРАбАННыХ МЕльНиц РудОй | 1978 |
|
SU837414A1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491580A1 |
| Система автоматического регулирования плотности пульпы в мельнице рудного самоизмельчения | 1982 |
|
SU1066646A1 |
| Система автоматического управления вязкостью шлама на выходе мельницы | 1977 |
|
SU633605A1 |
| Система автоматического регулирования гранулометрического состава загрузки в мельницах самоизмельчения | 1984 |
|
SU1158239A1 |
| Способ автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1414461A1 |
| Система автоматического управления одностадийным циклом мокрого измельчения | 1987 |
|
SU1491579A1 |