Эта цель достигается тем, что определяют динамическую составляющую командного сигнала и в интервале времени, на котором знаки величины динамической составляющей и ее производной различны, сравнивают нроизводные командного сигнала и выходной координаты. На фиг. 1 изображен график зависимости сигналов управления от времени при известном способе управления; на фиг. 2- график реакции следящей системы на смещенный командный сигнал; на фиг. 3- пример реализации способа в рулевом приводе согласно изобретения; на фиг. 4 и 5 - переходные процессы в системе управления движением космического аппарата; па фиг. 6 - области устойчивости в плоскости параметров автомата стабилизации. Для пояснения сущности способа необходимо ответить на вопрос - нужно ли продолжать слежение за комапдпым сигналом на интервале /i-/2 (фиг. 1), когда скорость и сама величина командного сигнала различны по знакам бком-бком 0. Для такого рода систем, для которых предназначен способ, применяется рулевой привод исполнительных органов, являющийся непрерывной следящей системой системой слежения фактического отклонения исполнительного органа за задаваемой величиной командного сигнала. Главное динамическое ограничение в системах слежения - ограниченная скорость привода, обусловленная его ограниченной мощностью. Общий недостаток способов управления непрерывных следящих систем заключается в ограничении скорости слежения, когда при небольщих сигналах (в линейной зоне скоростной характеристики привода) рулевой привод обеспечивает слежение за командным сигналом, а при увеличе}1ии сигнала (в зоне насыщения по скорости) слежение происходит с запаздыванием. Этот процесс в следящей системе привода при работе его в зоне насыщения скоростной характеристики иллюстрируется на фиг. 1, где приняты следующие обозначения: бком - командный сигнал, являющийся гармонической функцией; б - ответная реакция системы - отклонение исполнительного органа при ограниченной скорости слежения. На фит. 1 видно несоответствие командного и ответного сигналов по знакам, являющееся следствием запаздывания в системе слежения: командный сигнал на интервале времени требует отрицательного знака унрав.тяющего воздействия, а ответная реакция привода - положительна. Это обстоятельство вызывает увеличение огнибки вплоть до неустойчивости управления. Так как командный сигнал отражает требуемое управление аппаратом и уменьше ие его roBopJrr о том, что фак7пческое, существующее на данный момент, упразляюи;ее воздействие велико, то станет очевидиым и ответ ла иоставлепный вопрос: на нисходящей ветви командного сигнала не следует осуществлять слежения за самой величиной команд}юго сигнала, а необходимо вести слежение за его скоростью. Поэтому смещение командного в интервале ;i - /2 ча величину накопивнлегося рассогласования A(i) между требуемым бко.м (i) и фактическим рулем 6(/i): A(,)-WW-4A) обеспечит нужное движение ру.тя - у.мсньнгающее управляющее воздействие, т. е. как раз требуемое слежение за скоростью командного сигна.та. На фиг. 2 показана реакция следящей системы привода при таком смещении. Смещенный команд}1ый сигнал обозначен При таком управлении приводом можно полностью исключить запаздывание в следящей систел5с iicjabuci, от амплитуды входного сигнала и ограничения скоростной характеристики привода. Формирование динамической сос1авляющей командного сигнала. Эта операция заключается в исключении из командного сигнала статической составляющей. Например, если командный сигнал на привод рулевых сонл КА сформирован в виде «ком Ki,v + к у + K-j + K,y, где KV - коэффициент передачи автомата стабилиза1и1и по еигналу тангажа; Ki --- коэффициент передачи по сигналу угловой скорости; V - угол отклонения КА в плоскости тангажа; К - координата перемещения КА, то в установивщемся режиме отклонение рулсзых сопл б обусловлено составляющей сигнала KyYДи1 а: 1ическая составляющая в этом c;iyчае определится как , + КУ + К-. Выделение време)1ного интервала, на котором знаки динамической составляющей и скорости различны. Эта операция состоит в онределении разности текущего и предшествующего значений динамической составляющей, сравнення знака полученной разности со знаком амой составляющей. Несовпадение знаков и определяет временной интервал, где треуется осуществлять слежение за скоостью командного сигнала, а не за величиной его.
Работа следящей системы привода.
При совпадении знаков динамической составляющей командного сигнала н скорости его (восходящая ветвь) бд,ш-бд„н 0 производится обычное слежение руля за командным сигналом; ощибка рассогласования в следующей системе привода А()бком(0-МО поступает в запоминающее устройство.
В случае различных знаков динамической составляющей командного сигнала и егоскорости (нисходящая ветвь)
бдшгбд ш ;0 из командного сигнала вычитается накопивщаяся погрешность слежения Л(г), запомненная на момент смены знака скорости командного сигнала. При этом поступление сигнала ошибки рассогласования A(f) в запоминающее устройство Прерывается. Оно хранит ошибку слежения, накопленную на предыдущем этапе, которая является величиной постоянного смещения командного сигнала. Таким образом, устраняется начальная ошибка рассогласования в системе привода и происходит слежение за скоростью изменения командного сигнала.
В случае обеспечения хорошего слежения за командным сигналом ошибка рассогласования A(t) близка к нулю. Поэтому следящая система привода плавно переходит к обычной структуре на установившемся режиме работы системы управления.
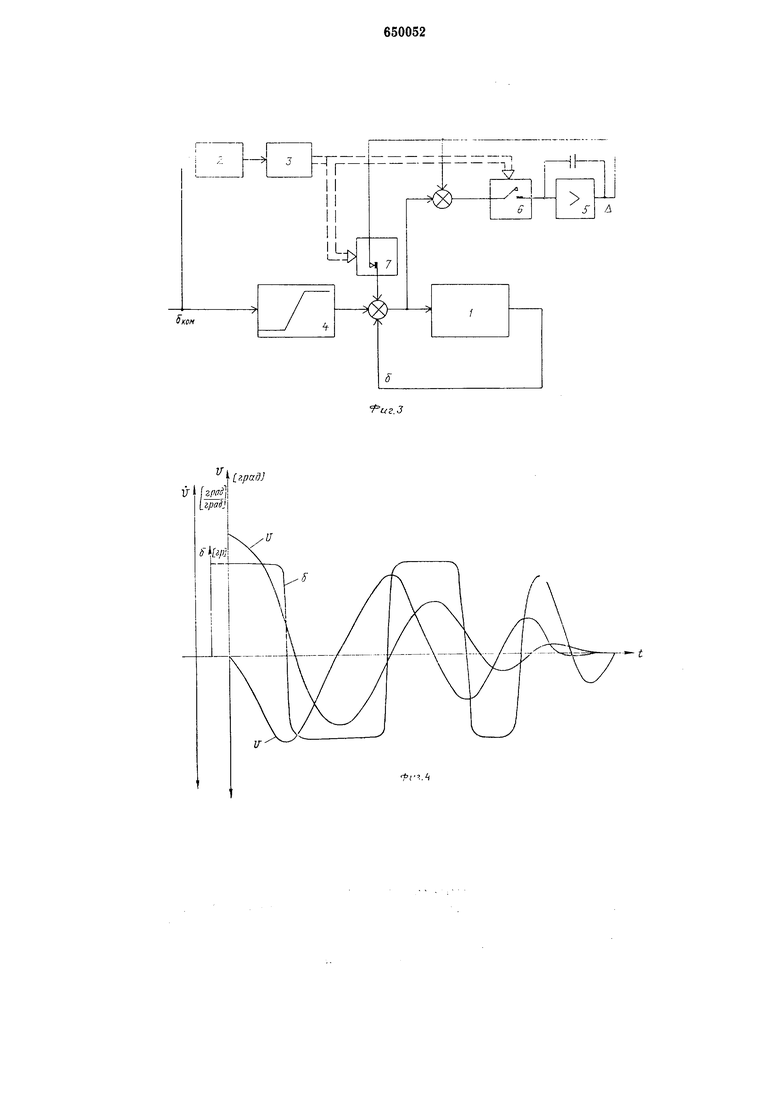
Возможная реализация способа в аналоговом варианте системы показана на фиг. 3, где функциональная схема содержит следящую систему рулевого привода 1, блок 2 формирования динамической составляющей командного сигнала, блок 3 выделения временного интервала, на котором знаки динамической составляющей и скорости ее различны, ограничитель 4 командного сигнала, запоминающее устройство ошибки рассогласования, выполненное на интегрирующем операционном усилителе 5, коммутационные блоки 6 и 7 выполнены на реле. Положение реле соответствует работе системы для случая смещения командного сигнала.
Эффективность применения предлагаемого способа иллюстрируется на фиг. 4 и 5. На фиг. 4 показан переходной процесс в системе управления движением КА
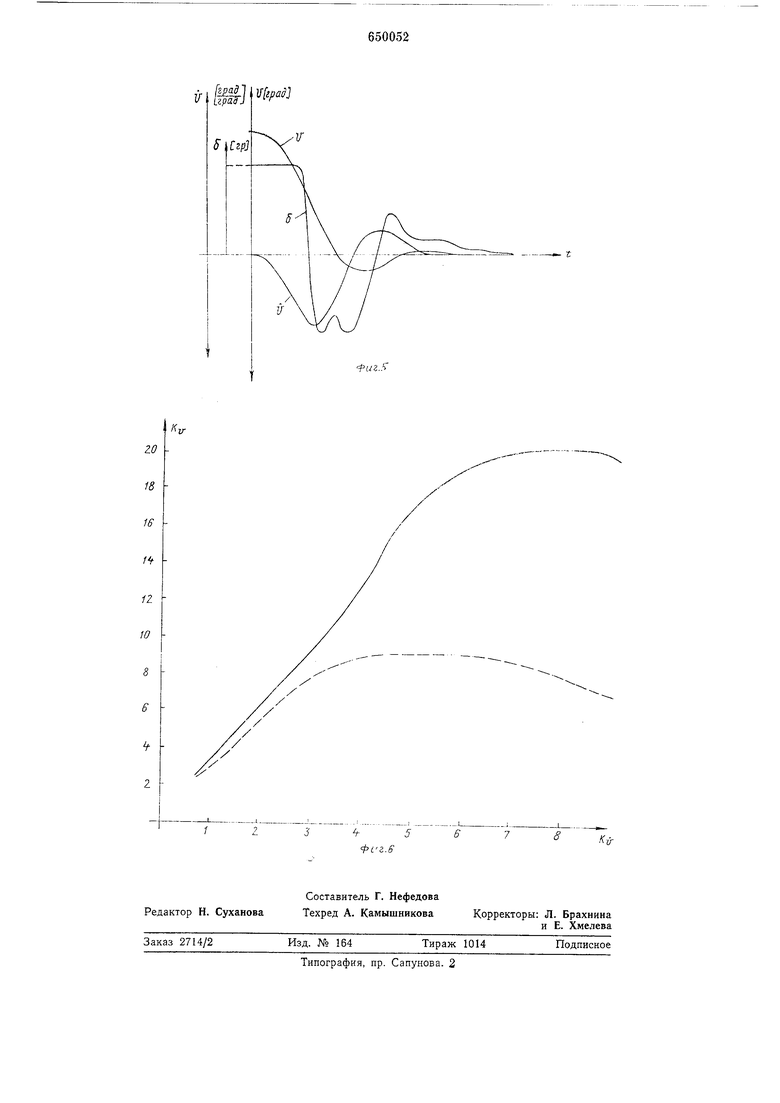
при отработке начальных возмущений для обычного варианта работы автомата стабилизации. На фиг. 5 представлен переходной процесс в случае применения способа при том же начальном отклонении аппарата и сохранении тех же передаточных чисел и структуры автомата стабилизации. Как видно из представленной иллюстрации, одно это изменение следящей системы привода позволило существенно увеличить устойчивость и поднять качество управления.
Полученный процесс также подтверждает утверждение о расширении области допустимых возмущений, отрабатываемых системой.
На фиг. 6 показаны области устойчивости в плоскости параметров автомата стабилизации. Пунктиром обозначена область устойчивости системы для известной структуры автомата стабилизации; сплошной линией - для случая применения предлагаемого способа. Увеличение области устойчивости системы в случае применения способа позволит выбирать больщие передаточные числа в автомате, обеспечивая большее быстродействие и иовышение точности управления.
30
Формула изобретения
Способ формировапия управляющего сигнала в системах автоматического регулирования путем формирования командного сигнала и сравнения его с выходной координатой системы, отличающийся тем, что, с целью увеличения точности управления, определяют динамическую составляющую командного сигнала н в интервале времени, на котором знаки величины динамической составляющей и ее производной различны, сравнивают производные командного сигнала и выходной координаты.
Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 399825, кл. G 05В 11/01, 1971. 2. Котельников В. А. Улучшение стабилизации систем регулирования при ограниченной скорости сервопривода при помощи запоминающего устройства. «Автоматика и телемеханика № 4, 1957.
. 5,5коп
комМ

| название | год | авторы | номер документа |
|---|---|---|---|
| ПУЛЬТ, СИСТЕМА И СПОСОБ РУЧНОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) "АРЖЕСАН" | 1996 |
|
RU2128600C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ СНИЖЕНИИ | 2014 |
|
RU2542686C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |

/
t
