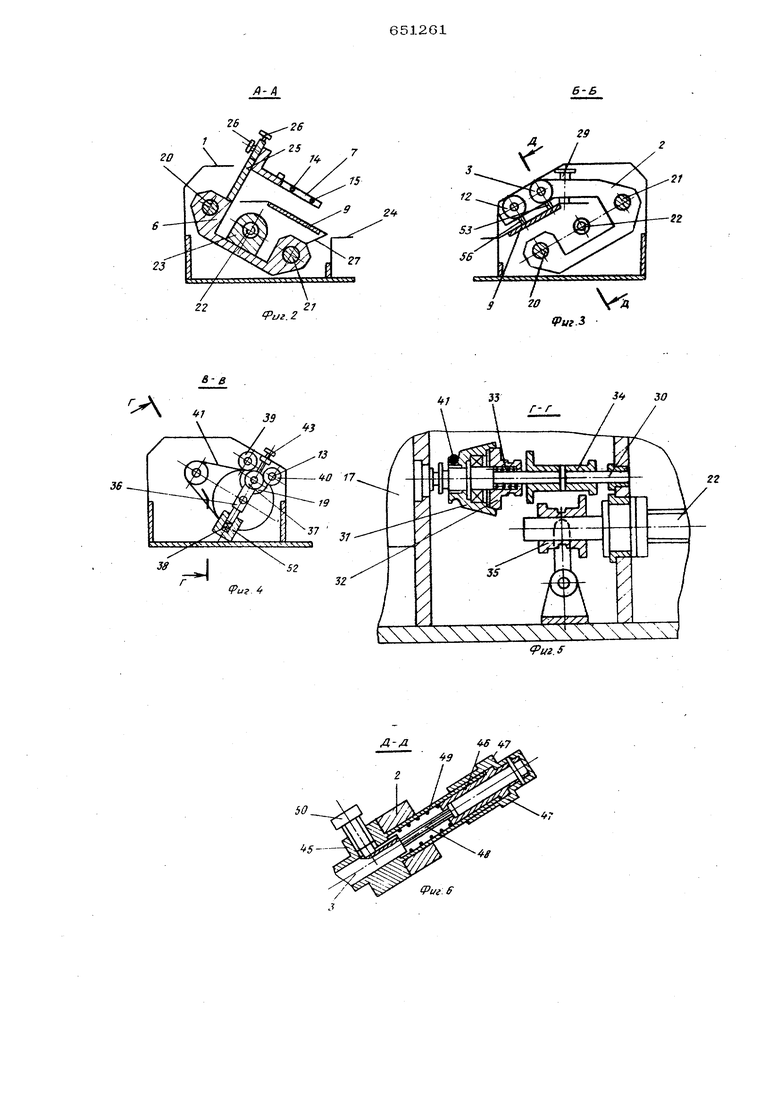
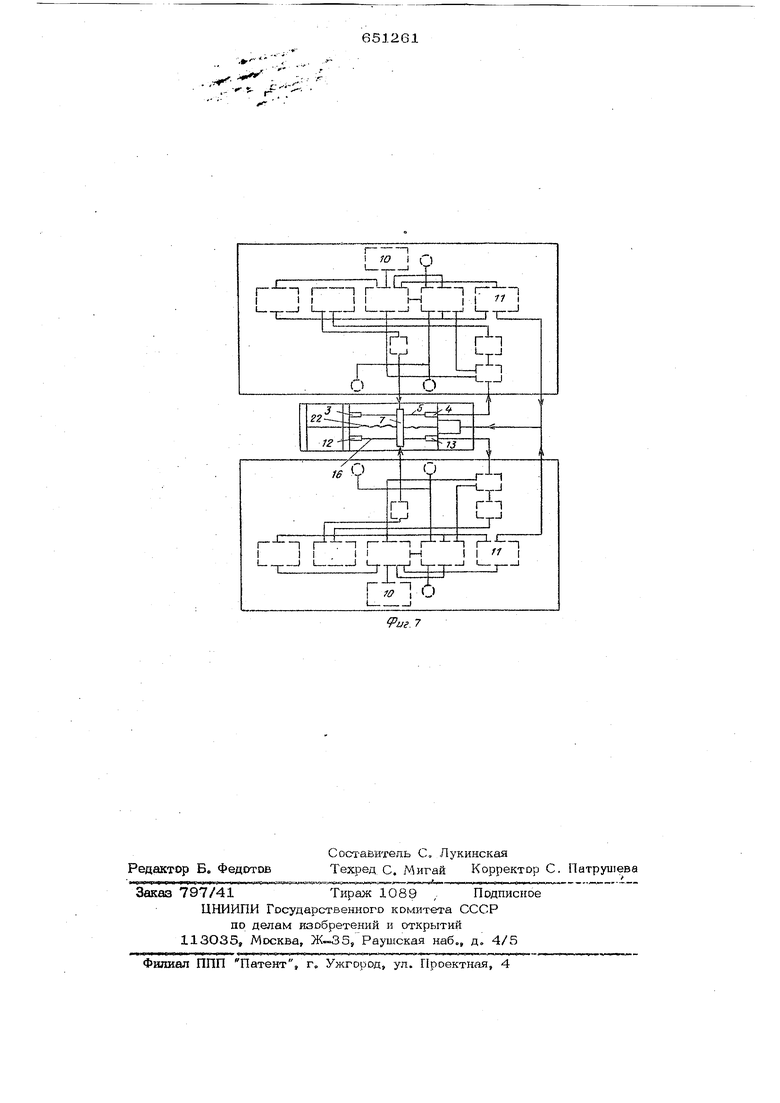
3 и с токоведушей швной, плоскости которых иараллепьвы друг другу, направляющие ссхзтоят из соосно расположенных иовороткых неподвижных контактных важимов и подвижных в продольном Направлении зажимов, скользящих по токоведушей шине, снабженньтх подпружиненными механизмами натяжения .Х5тержней, Между направляющими расположен соосно им проверочный модуль с авумя отверстиями для стержней, соепнненный с передвижной кареткой, привод поворотных контанктных зажимов и каретки выполнен в виде двигателя, сое диненного с коробкой передач через зуб чатую передачу, а передвижная каретка с проверочным модулем и подвижная бабка вьгаолнены в виде скоб, проходящих сквозь вертикальную щель станины и охватывающих токоведущую шину, и расположены на двух дополнительных направляющих, между которыми в середй1ае установлен ходовой винт в одной плоскости с ними, соединенный с плавающей гайкой. На фиг. 1 схематически представлен обший вид данного устройства для разбраковки стержней, покрытых тонкой магнитной пленкой; на фиг. 2 - сечение на фиг. 1, где показана каретка с проверочным модулем; на фиг. 3 - ра рез Б-Б на фиг. I, где показана подвижная бабка с контактными зажимами; на фиг. 4 - разрез В-В на фиг. 1, где показан подпружиненный механизм поворота стержней с передачами; на фиг. 5 сечение Г-Г на фиг. 4, где показан при вод каретки; на фиг. 6 - сечение Д-Д на фиг. 3, где показан механизм натяжения стержня; на фиг. 7 - структурная электрическая схема подключения прибора и блоков контроля и управления Устройство содержит станину 1, под.. вижную бабку 2, контактные зажимы 3 и 4 для закрепления стержня 5, передвижную каретку 6с закрепленным на ней проверочным модулем 7, связанным с контролируемым стержнем 5, привод 8, токоведущую шину 9, блок контроля 10, блок управления 11, контактные зажимй 12 и 13, смонтирован ные в станине 1 параллельно зажимам 3 и 4. Станина 1 прямоугольная с вертикальной щелью, с двумя направляющи н с токоведущей щиной 9, плоскости ко торых параллельны друг другу, причем 61 направляющие состоят из соосно расположенных поворотных неподвижных контактных зажимов 4 и 13 и скользящих по токоведущей щине 9 зажимов 3 и 12, снабженных подпружиненными механизмами натяжения стержней, а между направляющими расположен соосно с ними проверочный модуль 7 с двумя отверстиями 14 и 15 для стержней 5 и 16, соединенный с передвижной кареткой 6. Привод 8 поворотных неподвижных контактных зажимов 4 и 13 и передвижной каретки 6 выполнен в виде двигателя 17, соединенного с коробкой п&редач 18 через зубчатую передачу IS а передвижная каретка 6 с проверочным модулем 7 и подвижная бабка 2, выполненные в виде скоб, проходящих сквозь вертикальную щель станины 1 и охваты- вакнцих токоведущую шину 9, расположены на двух дополнительных направляющих 2О и 21, между которыми в одной плоскости с ними в середине установлен ходовой винт 22, соединенный с плавающей гайкой 23. Станина 1 имеет линейку 24 для измерения перемещений (фиг.2), а на каретке 6 находятся стойка 25 и ме- ханизмы 26 установки проверочного модуля 7, образующие совместно с кареткой 6 скобу, а также указатель перемещения 27. Ходовой винт 22 снабжен маховиком 28, а подвижная бабка 2 - стопорным винтом 29. Привод 8 включает в себя двигатель 17, коробку передач 18, вал 30 с закрепленными на нем свободно вращающимся щкивом 31, представляющим собой ведомую фрикционную полумуфту, ведущей полу муфтой 32 с пружиной 33, обладающей возможностью продольного перемещения, и зубчатым блоком 34; передвижной зубчатый блок 35, связанный с ходовым винтом 22 и переключаемый в нужное положение; подпружиненный блок 36 с зубчатой передачей 10, фрикционным шкивом 37 и пружиной 38, который связан фрикционным щкивом 37 с фрикционными шкивами 39 и 40 поворотных неподвижных контактных зажимов 4 и 13 ji гибкой передачей 41 со щкивом 31 { механизмы 42 и 43 включения и выключения фрикционной муфты, передвижного зубчатого блока 35 и подпружиненного: блока 36. Каждый подвижный в продольном направлении контактный зажим 3 и 12
снабжен механизмом 44 натяжения стержней, состоящим из корпуса 45 с делениями, гайки 46 с нониусом 47, винта 48 и пружины 49, Эти зажимы имеют также паз, в который входит стопорный винт 50, Каждый поворотный неподвижный контактный зажим 4 и 13 снабжен маховиком 51 с делениями для поворота вручную.
Подпружиненный блок 36 перемещаеся в направляющих 52. Хсд каретки 6 ограничен микропереключателями 53 и 54.
Подвижная бабка 2 имеет электрические контакты 55 и 56, соприкасающиеся с токоведущей шиной 9.
Кроме того, в устройство входят осциллограф 57 и пульт ручного управления 58,
Работает устройство следуюишм образом.
Перед включением устройства два контролируемых стержня 5 и 16, покрытых магнитной пленкой, пропускают сквозь отверстия 14 и 15 проверочного модуля 7, установленного в стойке 25 на подвижной каретке 6 и отрегулированного относительно подвижных в продольном направлении контактных зажимов 3 и 12 и поворотных неподвижных контактных зажимов 4 и 13 с помощью установочных механизмов 26, и захватывают с одного конца контактными зажимами 3 и 12, ас другого - зажимами 4 и 13, причем зажимы 3 и 12 устанавливают на необходимую для захвата длину с помощь перемещаемой по направляющим 2О и 21 в станине 1 бабки 2, скользящей электрическими контактами 53 и 54 по лицевой панели с токоведущей шиной 9 и стопорящейся винтом 29. Подвиаьные в продольном направлении котгактные зажимы 3 и 12 вытягивают стержни 5 и 16 параллельно друг другу в исходное положение для измерения с помощью механизмов 44 натяжения Стержней 5 и 16 с предварительным натяжением с помощью пружины 49. После этого нониус 47 устанавливают в нулевое положение и выполняют нужное натяжение с помощью гайки 46 и винта 48, которые сжимают пружину 49, по делениям корпуса 45 механизма натяжения 44. Перемещение ограничивается продольным пазом и стопорным винтам 5О. Подвергнутые упругой
деформации растяжения стержни 5 и 16 затем закручиваются на определенный угол с помощью двигателя 17, вала ЗО через включенную фрикционную муфту, гибкую передачу 41, подпружиненный блок 36 с зубчатой передачей 19 и фрикционным шкивом 37, шкивЫ 39 и 4О и поворотные неподвижные контактные зажимы 4 и 13. Поворот огрбшичен микропереключателями 53 и 54, на которые действуют упоры, установленные на валах контактных зажимов 4 и 13 (на чертежах не показано). Цпя управления движением каретки 6 и контшстными зажимами 4 и 13 служит пульт ручного управления 58.
Все контактные зажимы обеспечивают как электрический контакт изолированных стержней 5 и 16, так и крепление их концов.
Затем, согласно заданной программе блока управления 11, проверочный Mt дуль 7 начинает перемещаться вдоль
5 стержней 5 и 16, проверяя их годность. Модуль перемещается вместе с карет кой 6 по двум направляющим 2О и 21, закрепленным в станине 1 с помсяцью плавающей гайки 23 и ходового викга 22. Ходовой виш вращается при отключенной пружиной 33 фрикционной муфте с помощью двигателя 17, вала ЗО, неподвижного зубчатого блска 34 и передвижного зубчатого блока 35. Ход ка5ретки 6 ограничен микропереключателями 53 и 54, упирающимися в упоры каретки 6, и фиксируется указателем 27 по линейке 24. Кроме того, устройство имеет приспособление (на черт&жах не показано), которое в момент движения проверочного модуля 7 отм&чает на испыташвых стержнях 5 и 16 негодные точки, что облегчает отбор годных кусков из бракованных стержней.
После одновременной проверки стержней с помощью блока контроля 1О все контактные зажимы 3, 4, 12 и 13 освобождают стержни, их снимают и из бршсованного стерзкня сразу же на
0 линейке 24 вырезают годные куски,
В процессе проверки для настройки устройства по заданной программе необходимо просмотреть сигналы Marw нитной пленки на осциллографе 57 в отдельньк точках при скорости прсферочного модуля от нуля и выше и, проанализировав их, скорректировать настройку блоков контроля 10 и управд&7ния 11 а также сравнить сигналы, по.ступакшше со стержня с нулевой утпо- БОЙ д«)0рмацией и с деформированного стержия. Такую, обязательную настройку выполняют путем ручного перемещения каретки б с проверочным модулем 7 с помощью маховика 28, линейки 24 И указателя 27 с отключением двигателя ,17 передвижным зубчатым блоком 35, устанавливаемым механизмом 42 переключения в нейтральное положе ние, и ручного перемещения каждого новоротного неподвижного контактного зажима 12 и 13 с помощью маховика 51 с делениями с отключением подпру жиненного зубчатого блока 36 посредством механизма вюпочения и выключения 43, сжимающего пруяшну 38 в на правяяющих 52. Использование параллельных лшшй проверки стержней, в одном устройстве позволяет ускорить разбраковку и сократить производственные площади. Формула изобретени 1,Устройство для разбраковки стержней, покрытых тошсой магнитной пленкой, содержащее станину, подвижную бабку, основные контактные зажимы для закрепления., стержня, передвижную каретку с закрепленным на ней проверочным модулем, связанным с контрол руемым стержнем, и ее привод, токов дущие шины и блоки- контрсяя и управл ния, отличающееся тем. что, с целые повышения быстродейств и точности измерений, оно снабжено fo 1 ополнительными контактными зажимами, монтированными в станине параллельно основными контактными зажимами, танина выполнена прямоугольной формы вертикальной щелью, с двумя направяющими и с токоведущей шиной, плоскости которых параллельны друг другу, направляющие состоят из соосно расположенных поворотных неподвижных ко№тактных зажимов и подвижных в продолышм направлении контактных зажимов, скользящих по токоведущей шине, снабженных подпружиненными механизмами натяже ош стержней, между нап равляющими расположен соосно с ними проверочный модуль с двумя отверстиями для стержней, соединенный с передвижной кареткой. 2. Устройство по п. 1, отличающееся тем, что привод поворотных контактных зажимов-и каретки выполнен в виде двигателя, соединеного с коробкой передач через зубчатую передачу, а подвижная каретка с проверочным модулем и подвижная бабка вьшолнены в виде скоб, проходящих сквозь вертикальную щель станины и охватывающих токоведущую щину, и расположены на двух дополнительных направляющих, между которыми в середине установлен ходовой виш. в одной плоскости с ними, соединенный с плавающей гайкой. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 316020, q 01 I 11/02, 1970. 2.Авторское свидетельство СССР Ко 373776, Q 01 R 29/00, 1971. sr
/
27
22
tPuz.Z
6-Ь
П


| название | год | авторы | номер документа |
|---|---|---|---|
| ФРЕЗЕРНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ДОЛБЯКОВ | 2016 |
|
RU2621199C1 |
| Станок для заварки стеклозаготовок | 1979 |
|
SU870362A1 |
| Устройство для намотки магнитопровода | 1990 |
|
SU1835095A3 |
| Стенд для сборки и сварки шнеков | 1981 |
|
SU996148A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ | 1992 |
|
RU2021092C1 |
| Устройство для контактной сварки | 1985 |
|
SU1294543A1 |
| Полуавтоматический станок для нарезки метчиков | 1936 |
|
SU51469A1 |
| Перемоточная машина для наработки стоговидных паковок | 1976 |
|
SU772965A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
3
(Риг-е ЗО
