(54) СТЕНД ДЛЯ СБОРКИ И РАЗБОРКИ ГУСЕНИЧНОЙ ЦЕПИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для сборки и разборки гусеничной цепи | 1978 |
|
SU765091A1 |
| Способ сборки и разборки многошарнирных деталей | 1977 |
|
SU642126A1 |
| Стенд для разборки и сборки гусеничной цепи | 1979 |
|
SU872170A1 |
| Стенд для разработки и сборки гусеничной цепи | 1977 |
|
SU656796A1 |
| Стенд для разборки гусеничной цепи | 1980 |
|
SU948601A1 |
| Установка для разборки гусеничных лент | 1988 |
|
SU1585104A1 |
| Стенд для разборки и сборки гусеничной цепи | 1984 |
|
SU1227399A1 |
| Стенд для разборки гусеничной цепи | 1985 |
|
SU1250438A1 |
| Стенд для разборки гусеничной цепи | 1978 |
|
SU738929A1 |
| СТЕНД ДЛЯ РАЗБОРКИ ГИДРОЦИЛИНДРОВ | 1992 |
|
RU2071403C1 |
Изобретение касается ремонта и обслуживания гусеничных транспорт ных средств, преимущественно трактЬров со звенчатш 1И гусеницами,. Известен стенд для сборки и гусеничной цепи, содержащий станину с направляющими для перемещения звенье цепи посредством механизма подачи с гидроприводом и механической фиксацией звеньев, механи.зм запрессовки Псшьцев и механизм их центрирова- . имя 1 . Однако, этот стенд имеет низкsто производительность из-за несовершенства механизма центровки, выполненно го по принципу рычажной кинематической схеяиы, и обеспечивает лишь сборку гусеничной цепи. Известен также стенд для сборки и разборки гусеничной цепи, содержащий станину с направляющими для перемеще ния звеньев цепи посредством механиз ма подачи с гидроприводом и гидравли ческими фиксаторами звеньев,механиз запрессовки и выпрессовки пальцев и механизм их центрирования, выполненный в виде 1 ычажного привода 2. Однако и этот стенд имеет невысокую производительность, так как не обеспечивает достаточную точность установки пальца и требует болылих усилий для его запрессовки. Цель изобретения - повьлцение производительности стенда и снижение усилий запрессовки и выпрессовки. Это достигается тем, что механизм центрирования состоит из прямоугольной плиты с вибратором, опирающейся на шаровые опоры и подпружиненной относительно станины, механизм запрессовки и выпрессовки выполнен в виде гидроцилиндра с полым штоком, внутри которого установлена штанга, подпружиненная относительно штока и снабженная вибратором, установленным на ее конце, противоположном плите, причем на другом конце штанги выполнена выемка для фиксации пальца. При этом вибратор механизма центрирования и вибратор механизма запрессовки и выпрессовки могут быть выполнены с различной частотой вибрации, причем вибратор запрессовки и выпрессовки имеет более высокую частоту вибрации, чем вибратор механизма центрирования. Кроме того, стенд может быть снабжен захватом, выполненным в виде прямоугольной рамки с торцовыми пай;5ми, охватывающим головку штанги и головку пальца, и передвигающимся вместе с ними.
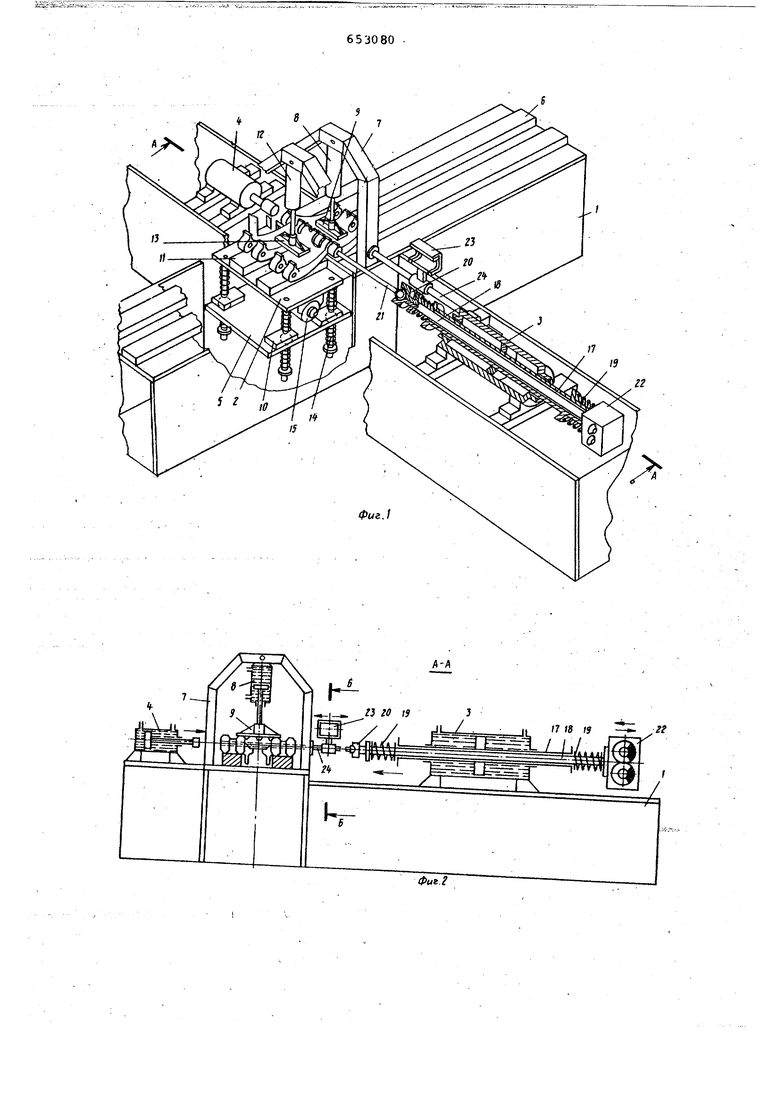
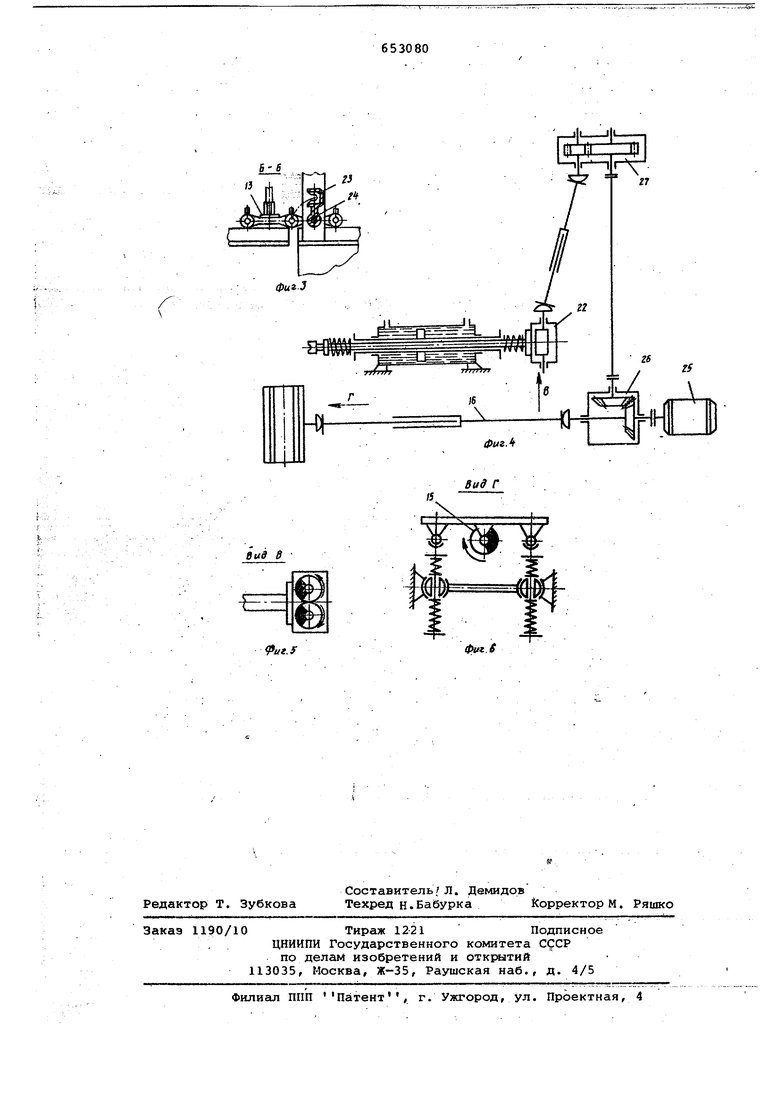
На фиг.1 изображен предлагаемый стенд, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2;. на фиг.4 - кинематическая схема стенда; на фиг.5 - вид по стрел ке В на фиг.4; на фиг.б - вид по стрелке Г на фиг.4.
Стенд смонтирован на станине 1, на которой размещены механизм центрирования 2, механизм запрессовки с гидроцилиндром 2, Механизм выН1: ес- совки гусеничных пальцев с устройстВсэМ для срезания шплинтов с гидроцилиндров 4 и механизм привода виб раторов 5. .
На станине выполнены продольные направляющие б, служащие для размещения и транспортировки по ним гусеничной цепи и установлена траверса 7, к верхней поперечине которой прикреплён силовой гидроцилиндр 8, на штоке которого на шаровой опоре размещена
лапка 9, служащая для фиксаций звеньев гусениц на направляющих. С этой же траверсой связан гидроцилиндр механизма горизонтального перемещения гусеничной цепи по направляющим (на чертежах не показан).
Механизм Центрирования 2 отверстий с пальцами размещен на кронштейне 10, закрепленном на станине, и состоит из плиты, с верхней сторсны которой имеются направляющие 11, расположенные на одной линии с продольными направляющими 6, и траверсы с гидроцилиндром 12, шток которогоснабжен лапкой 13, служащей такжедля фиксации собираемого (разбираемого) звена на плите. Плита установлена на сферические опоры и подпружинена относительно станины с помощью пружин 14. С нижнейстороны плиты установлен дебалансный вибратор 15 кругового дейсйвия. Вибратор связан с приводным механизмом с помощью карданного вала 16,
Механизм запрессовки и выпрессовКи пальцев расположен перпендикулярно к продольным направляющим 6 и 11 и представляет собой силовой гидро-,
цилиндр 3 с полым штоком 17, в котором размещена штанга 18, подпружинен-ная относительно последнего с помощью винтовых пружин 19.
Головка 20 выполнена в виде бойка с выемкой и взаимодействует с головкой гусеничного пальца 21. Кроме того,она содержит кольцевую канавку для размещения захвата для выпрессовки изношенных гусеничных . Па заднем конце ипангн размещен дебалансный вибратор 22 направляющего действия.
Механизм выпрессовки гусеничных
пальцев включает в себя гйдравлическое устройство для срезания шплинтов с гидроцилиндром 4 и захват 23 головки пальца взаимодействующий с головкой штанги 18. Гидравлическое устройство расположено перпендакулярно к направляющим б и 11 станины, напротив механизма запрессовки пальцев . Оно выполнено в виде силового гидроцилиндра 4, шток которого содержит оправку для срезания шплинтов. Захват 23-для выпрессовки изношенных пальцев представляет собой прмоугольную раму с торцовыми пазами которые заходят в кольцевую канавку на Головке штанги 18 и на гусеничный палец 21. Рамка размещается на направляющей 24 с возможностью поворта относительно нее.
Для привода силовых гидроцилиндров стенд оснащен гидроагрегатом, включающим шестеренный насос, распределитель и другую арматуру.
Механизм привода вибраторов работает так: с помощью электродвигателя 25 коническая передача 26 приводит в действие вибратор 15 механизма.центрирования., а с помощью другого вала, ра.сположенногоперпендикулярно первому, приводит во вращение цилиндрический редуктор 27, в свою очередь, этот редуктор также с помощью«кардан нрго вала связан с дебалансным вибратором 22 направленного действия механизма запрессовки и выпрессовки гусеничных пальцев.
Сборка гусеничной цепи производится в следующей последовательности Собранная часть гусеничной цепи размещается на продольных направляющих 6. станины. Последнеезвено этой цепи фиксируется с помощью силового гидроцилиндра на эти.х направляющих. Собира.емое звено, в свою очередь, фиксируется на направляющих 11 вибрирующей плиты. Затем в отверстие проушины звена последнего вставляется гусеничный палец, после чего включается гидроцилиндр механизма запрессовки и выпрессовки пальцев и привод вибраторов. При этом полый шток гидроцилиндра со штангой перемещается в сторону головки гусеничного пальца Одновременно под действием дебалансных вибраторов, приводимых в действие от одного привода, штанга.приводитсй в колебательное движение в осевом направлении , а вибрирующая плита с закрепленным к ней собираемым звеномв колебательное движение по круговой траектории. Колебание плиты совершается в вертикальной плоскости, перпендикулярной к оси штанги.
После того как боек соприкоснется с головкой гусеничного пальца, происходит некоторое сжатие передних пружин на штанге и одновременно по головке пальца наносятся частые периодические удары, частота которых 5 выше чем частота колебания собиравгмого звена, в связи с этим гидроцилиндр не испытывает большой нагру ки, так как запрессовка пальца в основном происходит под действием ; вибрации пальца, а полый штоктолько лишь перемещает штангу в осевом направлении. . При нарушении соосности отверстий или же при наличии каких-либо заусен цев в отверстиях, соединение звеньев прои,сходит следующим образом. После того как гусеничный палец встретит в отверстии какой-либо упор, или если отверстие не совпало с пальцем, то н некоторый промежуток времени дальней шее перемещение штанги (с пальцем) прекраиается, хотя полый шток и продолжает перемещаться за счет сжатия /пружины, распол-оженной в передней части, и тем самым увеличивается уси лие давления на гусеничный палец. Йод действием вибратора гусеничный периодически изменяет свое направление. Поскольку в это же время собираемое звено также совершает 1(;9лйбательное движение в вертикальнрй плоскости, перпендикулярной к ос ;пальца, под действием вибратора оно;йеремвцаётся и тем самым обеспечивае ся перемещение пальца. Этому также способствует несовпадение частоты колебания плиты с собираемым звеном и штангой (гусеничного пальца), так как колебание их с разной частотой йсключо бт возмО5Кность нанесения ударОв по одному и тому же месту и уско ряет процесс центрирования. Разборка гусеничной цепи происходит следующим образом; Разбираемое звено фиксиЕ уется на на.правляющих вибрирующей/плиты, а связанное с ним звено на направляющих станины. Потом с помощью гидроцилиндра 4 срезается Ыплинт с гусеничного пальца при это палец несколько перемещается в сторо ну штанги и освобождается головка пальца. После этого на головку гусеничного пальца и головку штанги накладывается захват, включается .гидро цилиндр запрессовки и выпрессовки пальца и Вибраторы. Поскольку йзноЩенный J:VceничныЙ палец имеет форму колен- атого вала, то благодаря колебаниям разбираемого звена и гусеничного пальца во взаимно перпендикуляр йых направляаощих легко достигается/ совмещение отверстий и выпрессовка пальца. 0 Применение предлагаемого стенда обеспечивает повышение производительнойти труда за счет лучшего центрирования и автоматизации процесса запрессовки и распрессовки пальцев. Формула изобретения 1.Стенд для сборки и разборки гусеничной цепи, преимущественно трактора, содержащий станину с направляющими для перемещения звеньев цепи посредством механизма подачи с гидроприводом и гидравлическими фиксаторами звеньев, механизм запрессовки и выпрессовки пальцев и механизм их центрирования, о .т л и ч а ю щ и и .с я тем, что, с целью повышения производительности и сни-/ жения усилий запрессовки и выпрессовки пальцев, механизм центрирования состоит H3j прямоугольной плиты с вибратором, бпйрающёйся на даровые опоры и подпружиненной относительно станины, механизм запрессовки и выпрессовки выполнен в виде гидроцилиндра с полым штоком, внутри которого устанрвлейа штанга, подпружиненная относительно штока и, .... снабженная вибратором, установленным на ее конце, противоположном плите, причем на другом конце штанги выполнена выемка для фиксации пальца. 2.Стенд по п. Г, 6тл йч а ющ и и с я тем, что вибратор механизма центрирования и вибратор механизма запрессовки и выпрессовки выполнены с различной частотой вибрации, при- чем вибратор запрессовки и выпрессовки имеет более высокую частоту вибрации, чем вибратор механизма центрирования. 3.Стенд по ПП.1 и 2, о т л и чающий с я тем, что.; он снабжен захватом, выполненным в виде прямоугольной рамки с торцовыми пазами, охватывающими головку штанги и головку пальца и передвигающимся вместе с ними. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 306938, М.кл. В 23 Р 11/.02, 1962. 2.Заявка tf 2384727, М.кл. G 01 М 17/00, 13.07,76, по которой принято положительное раиен.ие О выдаче авторского свидетельства. « to ts П 18 L/,. „ ,„ 13 ,.
вив В
