Изобретение относится к транспортному машиностроению,преимущественно к прои:зводству, соорке и разборке гусеничных цепей.
Известен стенд для сборки звенчатых цепей, содержащий, станину, на которой размещены, механизмы центрирования звеньев цепи и запрессовки и распрессовки пальцев с гидравлическим цилиндром и фиксатором пальца 1.
Однако выпрессовка и запрессовка пальцев у этого стенда производится только усилием цилиндра, для чего цилиндр его должен иметь большую мощность, что утяжеляет конструкцию стенда.
Известен также стенд для с,борки и разборки гусеничной цепи, содержащий станину, на которой размещены механизмы центрирования звеньев цепи и запрессовки и выпрессовки пальцев с гидравлическим цилиндром, вибратором и фиксатором пальца 2 .
Этот стенд имеет более высокую производительность, в сравнении с первым, особенно при распрессовке из-ношенных пальцев, так как он снабжен вибратором. Однако стенд еложен по конструкции и вследствие этого малонадежен. Вибратор у него установлен на конце штока, а вибрация от него передается через цилиндр и ряд других деталей.
1Дель изобретения - повышение надежности и упрощение конструкции.
Поставленная цель достигается тем, что вибратор подвижно установлен на направляющих, прикрепленных к станине, и закреплен между гидравлическим цилиндром и механизмом центрирования звеньев цепи, а фиксатор пальца прикреплен непосредственно к корпусу вибратора, который подпружинен относительно штока гидроцилиндра.,
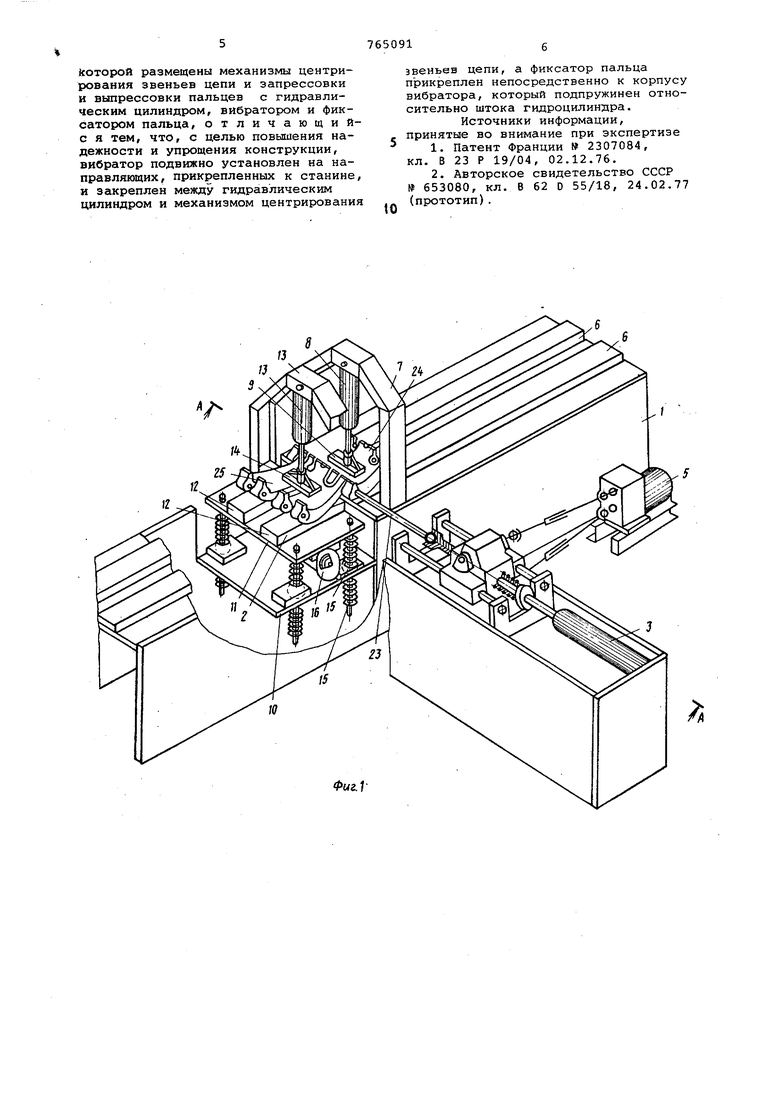
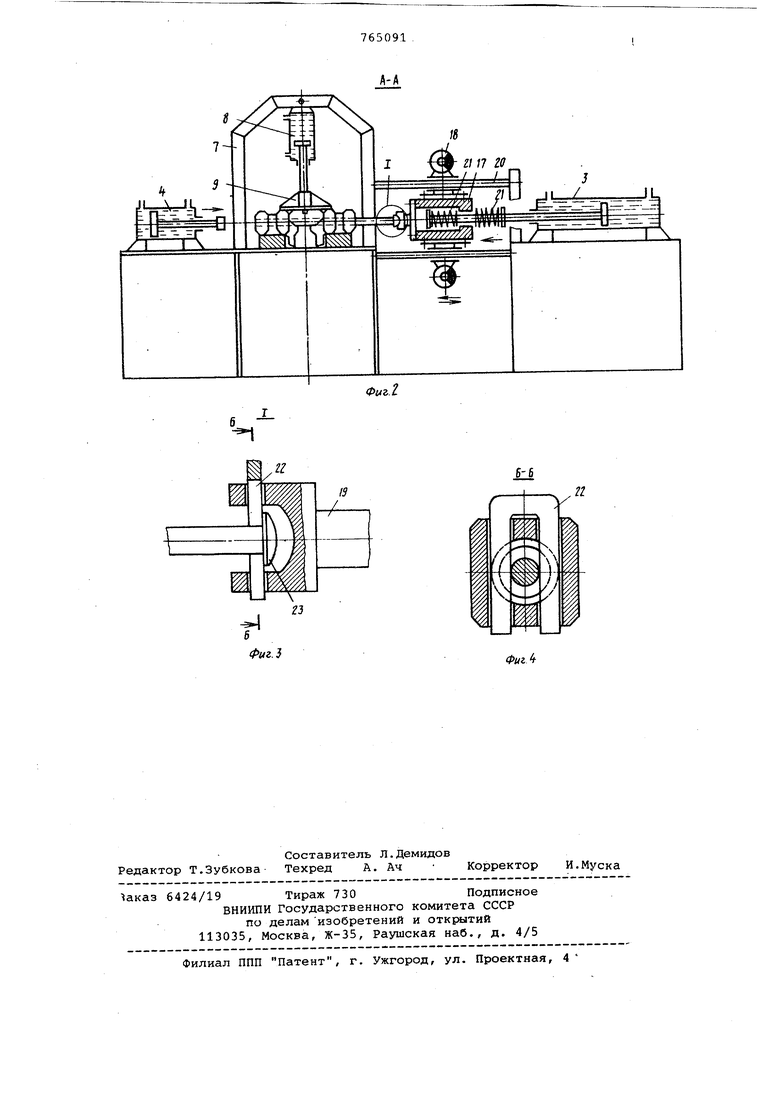
На фиг. 1 изображен предлагаемый стенд, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел Т на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3.
Стенд смонтирован на станине 1, на которой размещены механизм центрирования 2, механизм запрессовки с, гндроцилиндром 3, механизм выпрессовки гусеничного пальца с устройством для срезания шплинтов с гидрюцилиндром 4 и механизм привода вибраторов 5. На станине размещены продольные направляющие 6, служащие для транспортировки по ним гусеничной цепи, и установлена траверса 7, к верхней поперечине которой прикреплен силовой гидроцилиндр 8, на штоке которого на шаровой опоре размещена лапка 9, служащая для фиксации звеньев гусениц на направляющих. С этой же траверсой связан гидроцилиндр механизма горизонтального перемещения гусеничной цепи по направлякицим (на чертеже не показан). Механизм центрирования 2 отверстий с пальцами размещен на крюнштейне 10, прикрепленном к станине,и состоит из плиты 11, на верхней стороне которой расположены направляняци 12, находящиеся на одной линии с продольными направляющими 6, и траверсы с гидроцилиндром 13, шток которого снабжен лапкой 14, служащей также для фиксации собираемого (разбираемого) звена на плите. Плита уст новлена на сферические опоры и подпружинена относительно станины с помощью пружин 15. С нижней стороны плиты установлен дебалансный вибрато 16 кругового действия. Механизм запрессовки и выпрессовки пальцев расположен перпендикулярно к продольным направляющим б и 12 и представляет собой виброблок, состоящий из корпуса 17 с установленны ми на нем дебалансным вибратором 18 направленного действия и ударным бой ком 19. Корпус 17 перемещается по направляющим 20 и подпружинен с двух сторон относительно штока силового гидроцилиндра 3 винтовыми пружинами 21. Головка ударного бойка 19 имеет перпендикулярные к его оси параллель ные пазы для размещения П-образного захвата 22 при выпрессовке изношенных гусеничных пальцев. Механизм выпрессовки гусеничных пальцев включает в себя гидравлическое устройство для срезания шплин тов с гидроцилиндром 4 и П-образный захват 22 головки пальца 23, взаимодействующей с ударным бойком 19. Гидравлическое устройство расположено перпендикулярно к направляющим б и 12 станины, напротив механизма запрессовки пальцев. Оно выполнено в виде силового гидроцилиндра 4, шток которого содержит оправку для срезания шплинтов. Для привода гидроцилиндров стенд оснащен гидроагрег том, включающим шестеренчатый насос распределитель и другую арматуру (на чертежах не показаны). Стенд работает следующим образом Сборка гусеничной цепи производится в определенной последовательности. Собранная часть гусеничной цепи размещается на продольных направлякяцих б станины. Последнее звено 24 этой цепи фиксируется с помощью силового гидроцилиндра на зтих направляющих. Собираемое звено 25, в свою очередь, фиксируется на направляющих 12 вибрирующей плиты 11. В отверстие проушины звена 24 вставляется гусеничный палец и включаются гидроцилиндр 3 механизма запрессовки и выпрессовки и привод вибраторов 5. При этом шток гидроцилиндра перемещает виброблок по направляющим 20 в сторону головки гусеничного пальца. Одновременно под действием дебалансных вибраторов 16 и 18j приводимых в действие от одного привода, корпус 17 виброблока с ударным бойком 19 приводится в колебательное движение в осевом направлении, а плита 11 с закрепленным на ней собираемым звеном - в колебательное движение по круговой траектории, причем .колебание плиты совершается в вертикальной плоскости, перпендикулярной к оси ударного бойка. После того как боек соприкасается с .головкой гусеничного пальца, происходит некоторое сжатие задних пружин на штоке гидроцилиндра и одновременно по головке пальца наносятся частые периодические удары, частота которых выше, чем частота колебаний собираемого звена. В связис этим гидроцилиндр не испытывает большой нагрузки, так как запрессовка пальца в основном проихсодит под действием вибрации пальца с помощью виброблока, а гидроцилиндр только лишь перемещает виброблок в осевом направлении. Разборка гусеничной цепи осуществляется в следующей последовательности. Разбираемое звено 25 фиксируется на направлякнцих плиты 11, а связанное с ним звено 24 - на направляющих станины. С помощью гидроцилиндра 4 срезается шплинт с гусеничного пальца и палец несколько перемещается в сторону штанги, входя при этом в отверстие на головке ударного бойка, в параллельные пазы которой вставляется П-образный захват 22, который соединит ударный боек с головкой гусеничного пальца. Включаются гидроцилиндр 3 запрессовки и выпрессовки пальца и вибраторы, которые колебанием разбираемого звена и гусеничного пальца во взаимно перпендикулярных направлениях легко производят выпрессоаку пальца. Такое выполнение механизму запрессовки пальцев значительно повышает надежность работы механизма, а также упрощает конструкцию и снижает металлоемкость dтеида. Формула изобретения Стенд для сборки и разборки гусеничной цепи, содержащий станину, на
Которой размещены механизмы центрирования звеньев цепи и запрессовки и выпрессовки пальцев с гидравлическим цилиндром, вибратором и фиксатором пальца, отличающийс я тем, что, с целью повышения надежности и упрощения конструкции, вибратор подвижно установлен на направляющих, прикрепленных к станине, и закреплен между гидравлическим цилиндром и механизмом центрирования
звеньев цепи, а фиксатор пальца прикреплен непосредственно к корпусу вибратора, который подпружинен относительно штока гидроцилиндра.
Источники информации, принятые во внимание при экспертизе
1.Патент Франции 2307084, кл. В 23 Р 19/04, 02.12.76.
2.Авторское свидетельство СССР
№ 653080, кл. В 62 D 55/18, 24.02.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для сборки и разборки гусеничной цепи | 1977 |
|
SU653080A1 |
| Способ сборки и разборки многошарнирных деталей | 1977 |
|
SU642126A1 |
| Стенд для разборки и сборки гусеничной цепи | 1979 |
|
SU872170A1 |
| Стенд для разработки и сборки гусеничной цепи | 1977 |
|
SU656796A1 |
| Установка для разборки гусеничных лент | 1988 |
|
SU1585104A1 |
| Стенд для разборки гусеничной цепи | 1980 |
|
SU948601A1 |
| Стенд для разборки и сборки гусеничной цепи | 1984 |
|
SU1227399A1 |
| Стенд для сборки цепей | 1977 |
|
SU721312A1 |
| СТЕНД ДЛЯ РАЗБОРКИ И СБОРКИ ГИДРОГАСИТЕЛЕЙ | 1993 |
|
RU2068329C1 |
| Стенд для разборки гусеничной цепи | 1978 |
|
SU738929A1 |
Фиг.1
6-6
ь
11
I
ФигЛ
