Изобретение относится к машинам для открытой разработки нолезных ископаемых с ходовыми механизмами шагающего типа и может применяться, в частности, в ходовых механизмах шнекобуровых машин для выемки полезного ископаемого, например угля.
Известен шагающе-рельсовый ходовой механизм, включающий опорно-поворотную базу и лыжи, в направляющих которых установлены ходовые тележки, связанные с несущей рамой гидроцилиндрами двустороннего действия, причем лыжи расположены вдоль оси движения машины по забою .
Однако неподвижность в вертикальной плоскости опорно-поворотной базы относительно несущей рамы не позволяет обеспечить минимальное расстояни от опорной поверхности до нижней образующей скважины, что необходимо для уменьшения объема разрезных транщей, в которые устанавливают щнекобуровые мащины.
Наиболее близок к изобретению шагающий ходовой механизм, включающий опорные балки, лыжи и ходовые тележки, связанные с несущей рамой посредством гидроцилиндров двустороннего действия 2.
Целью изобретения является повышение надежности в работе механизма и срока службы при наличии боковых нагрузок на гидроцилиндры.
Для этого в ходовом механизме гидроцилиндры выполнены плунжерными и снабжены фиксаторами, а корпус каждого гидроцилиндра размещен в .направляющих рамы, к которой прикреплен плунжер.
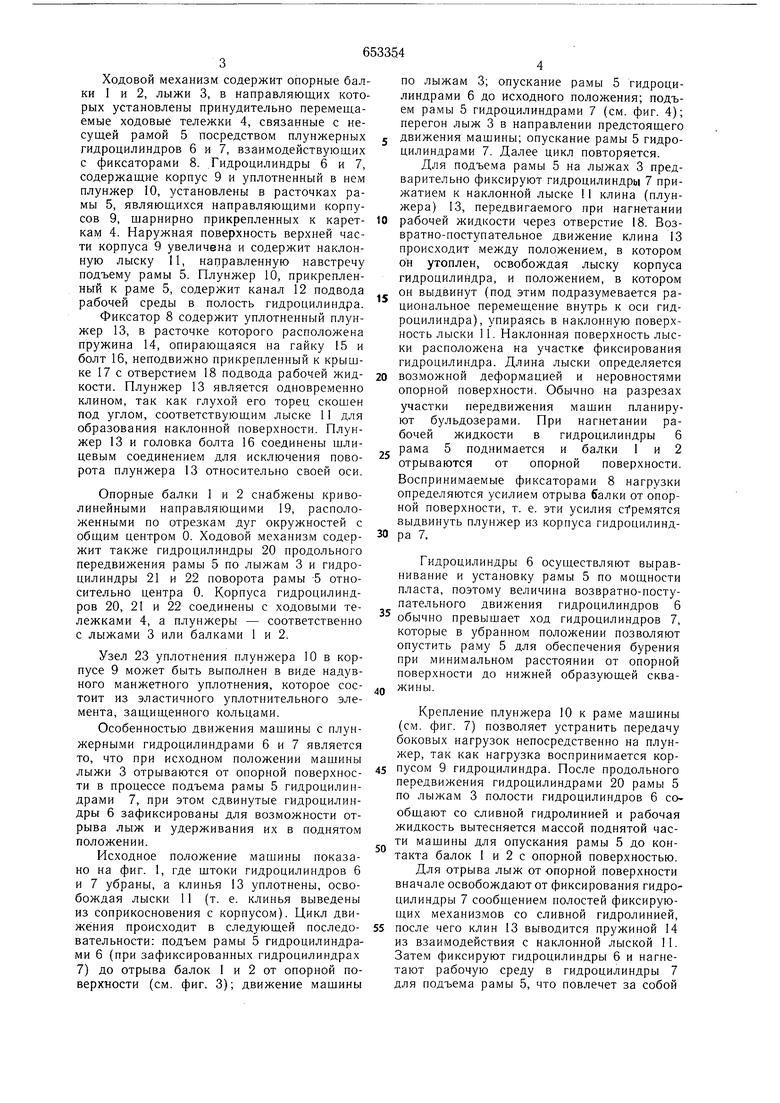
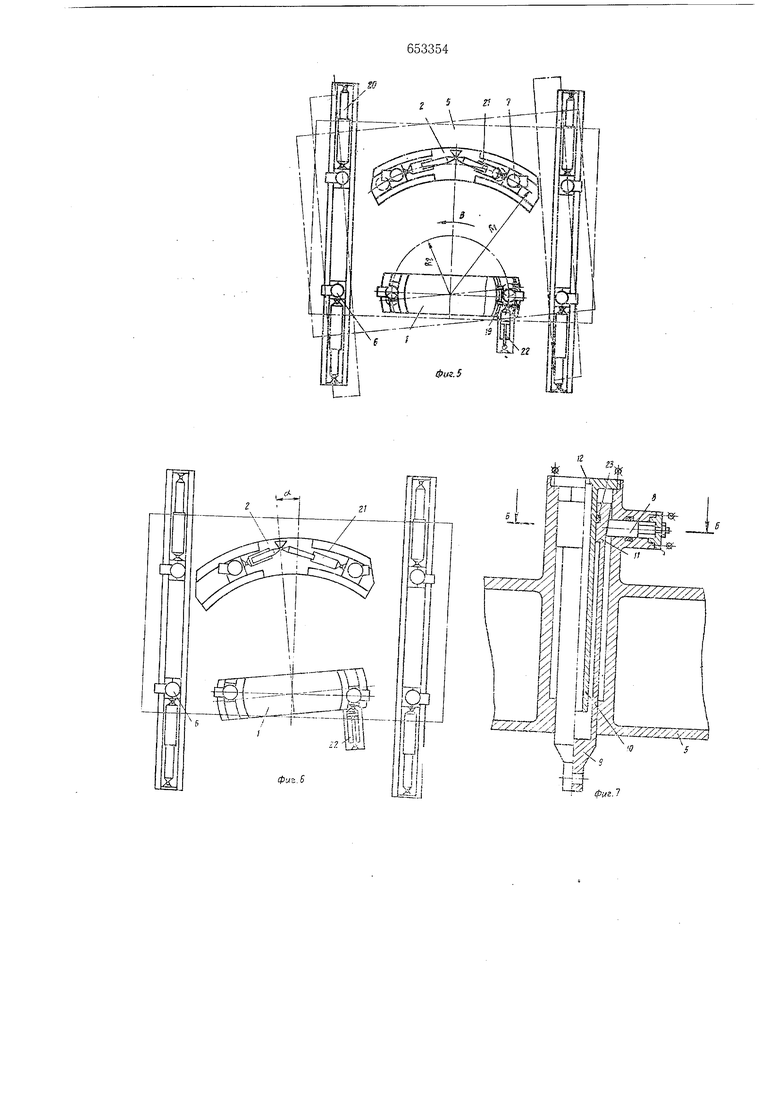
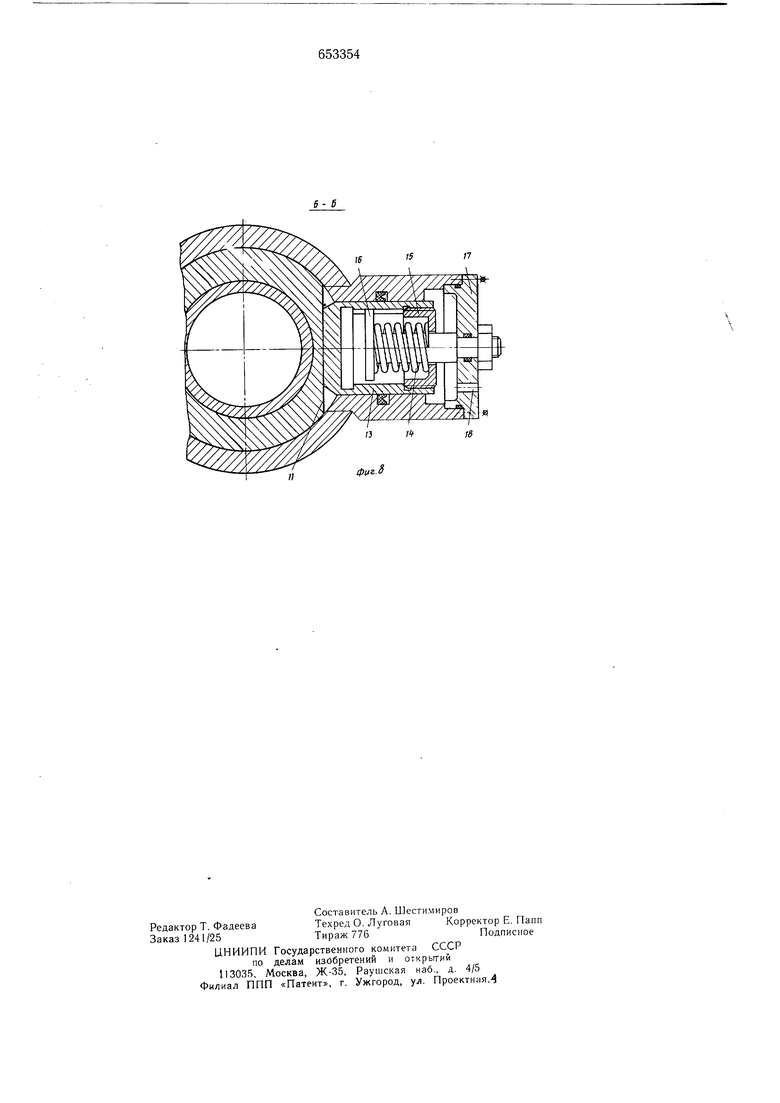
На фиг. 1 изображен предлагаемый механизм, исходное положение, при котором клинья фиксаторов выведены из взаимодействия с наклонной лыской корпуса гидроцилиндра; на фиг. 2 дано сечение А-А на фиг. 1; на фиг. 3 - показан ходовой механизм, рабочее положение (лыжи находятся в контакте с опорной поверхностью); на фиг. 4 - то же, опорные балки находятся в контакте с опорной поверхностью; на фиг. 5 - то же, вид сверху; на фиг. 6 - то же, вид сверху (поднятые балки повер0нуты в плане на некоторый угол относительно лыж, находящихся в контакте с опорной поверхностью); на фиг. 7 - гидроцилиндр лыж, положение которого зафиксировано ,на фиг. 8 дано сечение Б-Б на фиг. 7. Ходовой механизм содержит опорные балки 1 и 2, лыжи 3, в направляющих которых установлены принудительно перемещаемые ходовые тележки 4, связанные с несущей рамой 5 посредством плунжерных гидроцилиндров 6 и 7, взаимодействующих с фиксаторами 8. .Гидроцилиндры 6 и 7, содержащие корпус 9 и уплотненный в нем плунжер 10, установлены в расточках рамы 5, являющихся направляющими корпусов 9, шарнирно прикрепленных к кареткам 4. Наружная поверхность верхней части корпуса 9 увеличена и содержит наклонную лыску 11, направленную навстречу подъему рамы 5. Плунжер 10, прикрепленный к раме 5, содержит канал 12 подвода рабочей среды в полость гидроцилиндра. Фиксатор 8 содержит уплотненный плунжер 13, в расточке которого расположена пружина 14, опирающаяся на гайку 15 и болт 16, неподвижно прикрепленный к крышке 17 с отверстием 18 подвода рабочей жидкости. Плунжер 13 является одновременно клином, так как глухой его торец скошен под углом, соответствующим лыске 11 для образования наклонной поверхности. Плунжер 13 и головка болта 16 соединены щлицевым соединением для исключения поворота плунжера 13 относительно своей оси. Опорные балки 1 и 2 снабжены криволинейными направляющими 19, расположенными по отрезкам дуг окружностей с общим центром 0. Ходовой механизм содержит также гидроцилиндры 20 продольного передвижения рамы 5 по лыжам 3 и гидроцилиндры 21 и 22 поворота рамы -5 относительно центра 0. Корпуса гидроцилиндров 20, 21 и 22 соединены с ходовыми тележками 4, а плунжеры - соответственно с лыжами 3 или балками 1 и 2. Узел 23 уплотнения плунжера 10 в корпусе 9 может быть выполнен в виде надувного манжетного уплотнения, которое состоит из эластичного уплотнительного элемента, защищенного кольцами. Особенностью движения мащины с плунжерными гидроцилиндрами 6 и 7 является то, что при исходном положении мащины лыжи 3 отрываются от опорной поверхности в процессе подъема рамы 5 гидроцилиндрами 7, при этом сдвинутые гидроцилиндры 6 зафиксированы для возможности отрыва лыж и удерживания их в поднятом положении. Исходное положение мащины показано на фиг. 1, где щтоки гидроцилиндров 6 и 7 убраны, а клинья 13 уплотнены, освобождая лыски 11 (т. е. клинья выведены из соприкосновения с корпусом). Цикл движения происходит в следующей последовательности: подъем рамы 5 гидроцилиндрами 6 (при зафиксированных гидроцилиндрах 7) до отрыва балок 1 и 2 от опорной поверхности (см. фиг. 3); движение мащины по лыжам 3; опускание рамы 5 гидроцилиндрами 6 до исходного положения; подъем рамы 5 гидроцилиндрами 7 (см. фиг. 4); перегон лыж 3 в направлении предстоящего движения машины; опускание рамы 5 гидроцилиндрами 7. Далее цикл повторяется. Для подъема рамы 5 на лыжах 3 предварительно фиксируют гидроцилиндры 7 прижатием к наклонной лыске 11 клина (плунжера) 13, передвигаемого при нагнетании рабочей жидкости через отверстие 18. Возвратно-поступательное движение клина 13 происходит между положением, в котором он утоплен, освобождая лыску корпуса гидроцилиндра, и положением, в котором он выдвинут (под этим подразумевается рациональное перемещение внутрь к оси гидроцилиндра), упираясь в наклонную поверхность лыски 11. Наклонная поверхность лыски расположена на участке фиксирования гидроцилиндра. Длина лыски определяется возможной деформацией и неровностями опорной поверхности. Обычно на разрезах участки передвижения мащин планируют бульдозерами. При нагнетании рабочей жидкости в гидроцилиндры 6 рама 5 поднимается и балки 1 и 2 отрываются от опорной поверхности. Воспринимаемые фиксаторами 8 нагрузки определяются усилием отрыва балки от опорной поверхности, т. е. эти усилия cfpeмятcя выдвинуть плунжер из корпуса гидроцилиндра 7, Гидроцилиндры 6 осуществляют выравнивание и установку рамы 5 по мощности пласта, поэтому величина возвратно-поступательного движения гидроцилиндров 6 - ---„ - г обычно превышает ход гидроцилиндров 7, которые в убранном положении позволяют опустить раму 5 для обеспечения бурения при минимальном расстоянии от опорной поверхности до нижней образующей скважины. Крепление плунжера 10 к раме мащины (см. фиг. 7) позволяет устранить передачу боковых нагрузок непосредственно на плунжер, так как нагрузка воспринимается корпусом 9 гидроцилиндра. После продольного передвижения гидроцилиндрами 20 рамы 5 ПО лыжам 3 полости гидроцилиндров 6 сообщают со сливной гидролинией и рабочая жидкость вытесняется массой поднятой части мащины для опускания рамы 5 до контакта балок 1 и 2 с опорной поверхностью. Для отрыва лыж от опорной поверхности вначале освобождают от фиксирования гидроцилиндры 7 сообщением полостей фиксирующих механизмов со сливной гидролинией. после чего клин 13 выводится пружиной 14 из взаимодействия с наклонной лыской II. Затем фиксируют гидроцилиндры 6 и нагнетают рабочую среду в гидроцилиндры 7 для подъема рамы 5, что повлечет за собой
отрыв лыж от опорной поверхности. Приподнятые лыжи передвигаются гидроцилиндрами 20 в направлении предстоящего движения машины, после чего рама 5 опускается гидроцилиндрами 7 до исходного положения машины. Дальнейшее перешагивание машины осуществляется последовательным повторением циклов, описанных выше.
Изменение направления движения или регулирования положения исполнительного органа (не показан) машины в плоскости пласта при искривлении забоя можно осуществить поворотом рамы относительно центра О на месте установки машины. Криволинейные направляющие позволяют установить шнекобуровую мащину с исполнительным органом под требуемым углом в плоскости пласта. Они расположены по отрезкам дуг окружностей с общим центром по оси вертикальной цапфы, соединяемой с несущей рамой.
На фиг. 5 показан частный случай расположения центра О окружностей радиусом R) и R.. Поворот рамы осуществляется при опирании гидроцилиндрами 7 на балки 1 и 2, а лыжи 3 должны быть приподняты над почвой (см. фиг. 4). Гидроцилиндрами 22 и 21 (см. фиг. 5) перемещают по направляющим 19 тележки 4 и вместе с ними раму 5 на некоторый угол, например, в направление по стрелке В. После поворота раму 5 опускают гидроцилиндрами 7 до контакта лыж 3 с опорной поверхностью, сориентированных по направлению предстоящего движения. Если произведенный поворот рамы недостаточен, оторванные от опорной поверхности балки I и 2 (см. фиг. 3 и 6) поворачивают гидроцилиндрами 21 и 22 относительно. несущей рамы 5 на угол ос в направление дальнейшего поворота рамы 5. Чтобы раму 5 повернуть в плане еще на требуемый угол, выще описанные операции повторяются.
Конструкцию ходового механизма можно упростять, если фиксаторами будут снабжены только гидроцилиндры 6. Однако это приведет к уменьшению скорости передвижения машины, так как для отрыва башмака от опорной поверхности ход гидроцилиндров 6 (соответственно и время движения) возрастает на величину хода гидроцилиндров 7. При упрощенной конструкции отрыв балок осуществляется после упора поднимаемой рамы в уступ корпуса незафиксированных гидроцилиндров 7, полости которых сообщены с гидробаком.
Использование плунжерных гидроцилиндров с фиксаторами и приведенной взаимосвязью с рамой позволяет устранить передачу боковых нагрузок непосредственно на плунжер и в связи с этим повышает способность восприятия боковых нагрузок на гидроцилиндры без увеличения их габаритных размеров и веса.
Боковые нагрузки воспринимаются корпусом гидроцилиндра, который установлен в направляющих рамы и при угловой подвижности (перекосе) корпуса на величину зазора в посадочных поверхностях корпуса
и рамы плунжер не воспринимает боковых нагрузок. В связи с отсутствием боковых нагрузок в сочленении плунжера с корпусом гидроцилиндра не возникают недопустимые контактные давления, что обеспечивает долговечность уплотнений и трущихся деталей гидроцилиндра.
Предлагаемый ходовой механизм обеспечивает возможность эффективного обслуживания, так как для доступа к уплотнительным элементам гидроцилиндра достаточно
освободить крепление плунжера, после чего его можно извлечь без демонтажа всего гидроцилиндра.
Формула изобретения
30
Шагающий ходовой механизм, включающий лыжи, опорные балки и ходовые тележки, связанные с рамой посредством гидроцилиндров, отличающийся тем, что, с целью повыщения надежности в работе механизма
и срока службы при наличии боковых нагрузок на гидроцилиндры, они выполнены плунжерными и снабжены фиксаторами, а корпус каждого гидроцилиндра размещен в направляющих рамы, к которой прикреплен
плунжер.
Источники информации, принятые во внимание при экспертизе
1.Подэрни Р. Ю. Горные машины и комплексы для открытых работ. М., «Недра,
1971, с. 216-217.
2.Кущанов Г. К. и др. Механизм хода шнекобуровой машины ШБ-2. Веб. «Механизация и автоматизация горных работ. АлмаАта, «Казахстан, 1975, с. 219-225.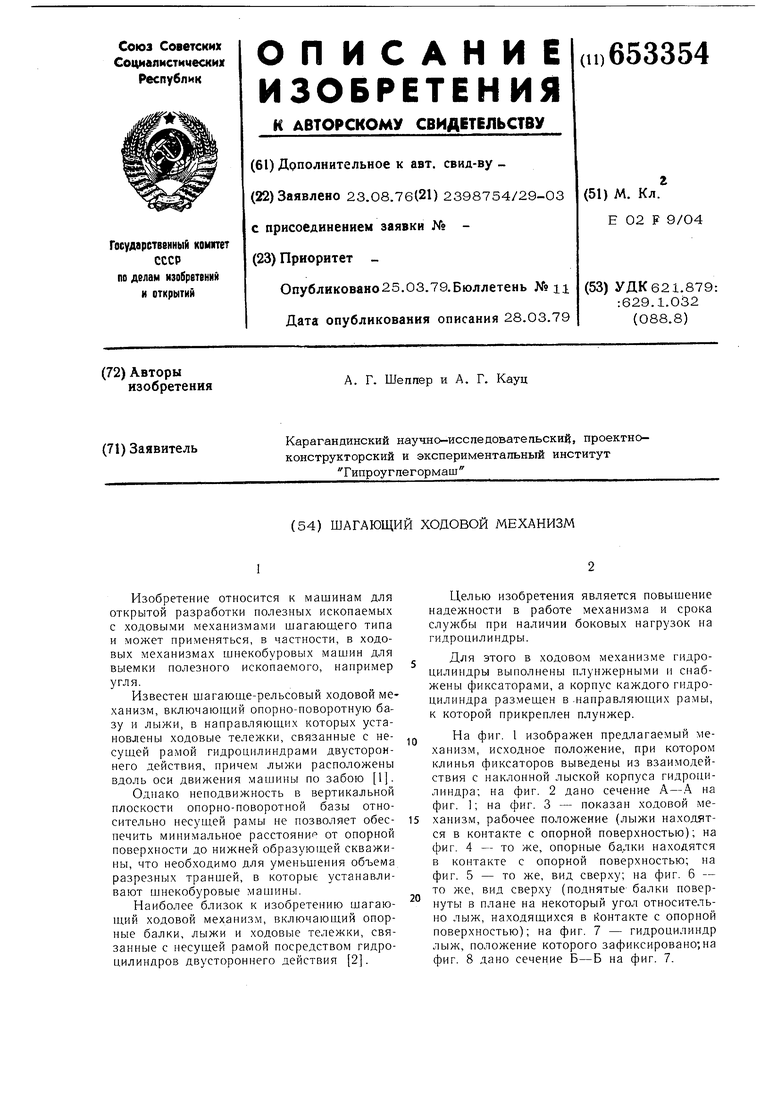
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОДОВОЙ МЕХАНИЗМ ШНЕКОБУРОВОЙ МАШИНЫ | 1973 |
|
SU427141A1 |
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2405691C2 |
| Шагающий механизм | 1978 |
|
SU713967A1 |
| Опорное устройство горнотранспортной машины | 1982 |
|
SU1137164A1 |
| Проходческий взрывонавалочный комплекс | 2018 |
|
RU2700388C1 |
| Ходовой механизм шнекобуровой машины | 1976 |
|
SU659734A2 |
| Ходовое оборудование тяжелых машин | 1975 |
|
SU653353A2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТРАНШЕЙНО-КОТЛОВАННОЙ МАШИНЫ И ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ РАБОЧЕГО ОБОРУДОВАНИЯ | 2008 |
|
RU2371551C1 |
| Ходовой механизм шагающей машины | 1977 |
|
SU676698A1 |
/,/7.y/Z ///y/Y
Фиг. 5
x XЧ % Qv /xчvx// л // x
,13
фue.
фигЛ
л
18
фиг.8
