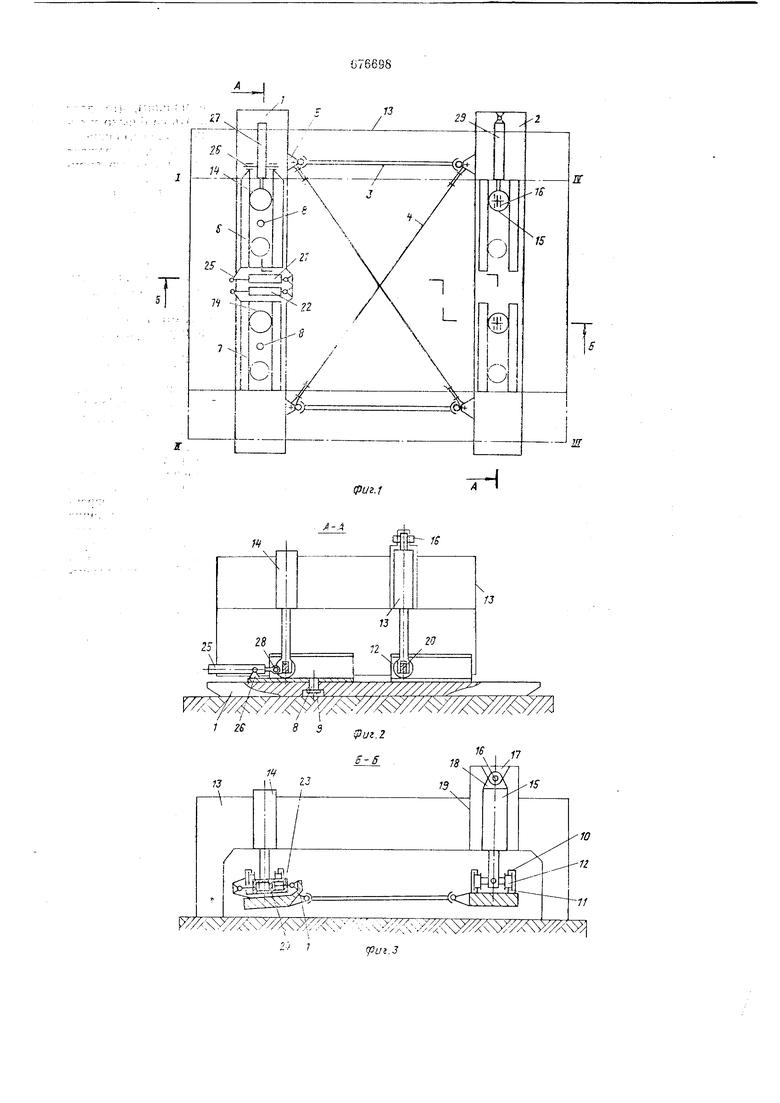
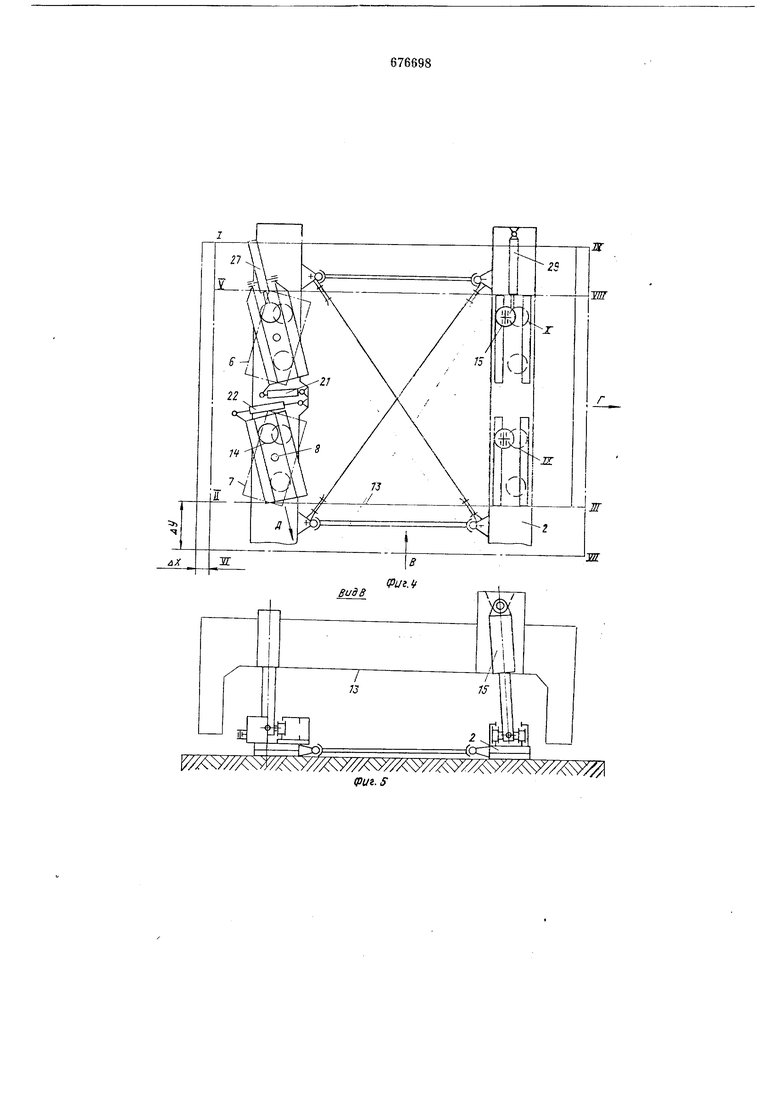
движении в поперечном направлении под углом к продольной осп, вид сверху; на фиг. 5 - вид по стрелке В на фиг. 4; на фиг. 6 - механизм при его повороте, вид сверху.
Ходовой механизм включает лыжи / и 2, соединенные между собой дистанционными элементами 3 и 4, которые выполнены жесткими и на торца.х содержат сферические шарниры, сочлененные с кронштейнами 5. К ним присоединены также элементы 4. На лыже / смонтированы поворотные направляющие 5 и 7, к каждой из которых жестко присоединена ось 8, подвижно сочлененная с лыжей / и содержащая. упор 9. Направляющие ff и 7 лыжи / и лыжи 2 содержат верхние 10 и нижние // рельсы, между которыми установлены ходовые тележки 12, связанные с несущей рамой 13 подъемными механизмами (гидроцилиндрами) 14, жестко прикрепленными к раме 13, и подъемными механизмами (гидроцилиндрамп) 15, соединенными с рамой шарнирами 16, закрепленными в проушинах 17. Механизмами 14 и 15 в данном частном случае являются гидроцилиндры, но ими могут быть также винтовые механизмы или полиспастные системы. Л1еханизмы 15 имеют опорные поверхности 18, через; которые передается поперечное усилие, действующее в направлении оси лыжи при продольном движении машины.
Рама 13 в местах закрепления механизмов /5 имеет прорези 19, обеспечивающие возможность качания (отклонения) механизмов 15. Тележки 12 содержат траверсу 20, с центральной частью которой шарнирно сочленены щтоки механизмов 14 и 15,и по торцам траверсы 20 расположены колеса, имеющие реборды.
Направляющие 5 и 7 содержат привод их поворота, выполненный в виде гидроцилиндров 21 и 22, а их опорные площадки содержат антифрикционный материал для уменьщения трения при повороте. Каждый из гидроцилиндров 21 и 22 содержит подвижный корпус 23, включающий две обособленные заглущкой 24 полости с расположенными в них поршнями, штоки которых шарнирно прикреплены к кронштейну 25, к направляющим 6 и 7 и к лыже /.
К торцам направляющей 6 на опорах 26 щарнирно закреплен корпус гидроцилиндра 27, шток, которого соединен с тележкой 12 шарниром 28. Торцы гидроцилиндра 29 щарнирно прикреплены к лыже 2 и тележке 12.
Осуществление каждой операции начинается с исходного положения ходового механизма, а под продольным или поперечным движением подразумевается движение машины в направлениях по отношению к продольной оси лыжи.
Продольное движение поднятой рамы
13(фиг. 1 и 2) осуществляется гидроцилиндрами 27 и 29, перемещающими тележки 12 вдоль их направляющих. Для последующего продольного движения рамы 13 механизмами 14 и /5 опускают ее до контакта с грунтом (фиг. 3) и поднимают лыжи 1 и 2, а затем передвигают их в направление предстоящего движения, после чего лыжи опускают до контакта с грунтом и последующего подъема рамы с целью повторения цикла движения.
Поперечное движение несущей рамы осуществляется в процессе поворота направляющих 6 и 7 (фиг. 4) относительно оси 8 гидроцилиндрами 21 и 22, которые перемещаются во взаимно противоположных (встречных) направлениях. В процессе поворота направляющих ось механизмов
14описывает криволинейную траекторию вокруг оси 8, поэтому гидроцилиндр 27 находится в плавающем положении, т. е. его полости в процессе поворота соединяются с гидробаком, а фиксация механизма от продольных движений обеспечивается гидроцилиндром 29. При поперечном движении рамы 13 происходит качание механизмов 15 (фиг. 5) относительно точки крепления к тележке 12, что приводит к наклону рамы в вертикальной плоскости н соответственно к отклонению осей механизмов М относительно щарниров в местах крепления к кареткам. Если, например, направправляющие 5 и 7 (фиг. 4) поворачивают относительно осей 8 гидроцилиндрами 21 и 22 в другом направлении, то рама 13 перемещается вправо по направлению стрелки Г на величину и занимает положение I-IV.
Для последующего поперечного движения рамы 13 вправо механизмами 14 и
15опускают ее до контакта с грунтом (фиг. 3) и поднимают лыжи 1 тл 2, затем поворачивают направляющие 5 и 7 в положение, изображенное сплошными линиями на фиг. 4. В процессе поворота направляющих 6 и 7 поднятая лыжа / перемещается вправо, так как оси 8 описывают криволинейную траекторию по радиусу вокруг механизмов 14. Дистанционная связь лыж / и 2 приводит также к перемещению вправо лыжи 2 и отклонению механизмов 15. После подъема рамы 13 механизмами 14 и 15 возможно дополнительное поперечное движение вправо на величину Ах поворотом направляющих 6 и 7 (фиг. 4), причем поворот направляюищх i5 и 7 не приводит к поперечному движению рамы 13, если тележки 12 будут расположены над осями 8, т. е. при совпадении (но вертикали) осей гидроцилиндров 14 и осей 8.
Движение несущей рамы способом краб, т. е. под углом к продольной оси, осуществляется гидродилмидрами 27 и 29 (фиг. 4),
перемещающими тележки 12 по направляющим лыжи 2, а также направляющих 6 и 7, предварительно повернутых в одно из положений, изображенных на фиг. 4, причезм оси 8 должны быть после поворота параллельиы, что обеспечивается гидроцилиндрами 21 и 22. При этом происходит перемещение несущей рамы под определенным углом к продольным осям лыж, что сопровождается одновременным перемещением в поперечном и продольном направлениях, а также отклонением (качанием) механизмов 15. При положении направляющих, изображенных на фиг. 4 сплошными линиями, и выдвижении щтоков гидродилиндров 27 и 29, соответствующие полости которых сообщены в процессе движения, рама 13 перемещается по направлению стрелки Д (см. фиг. 4) в положения V-VHI на величины Аг/ в продольном и А;е в поперечном направлениях.
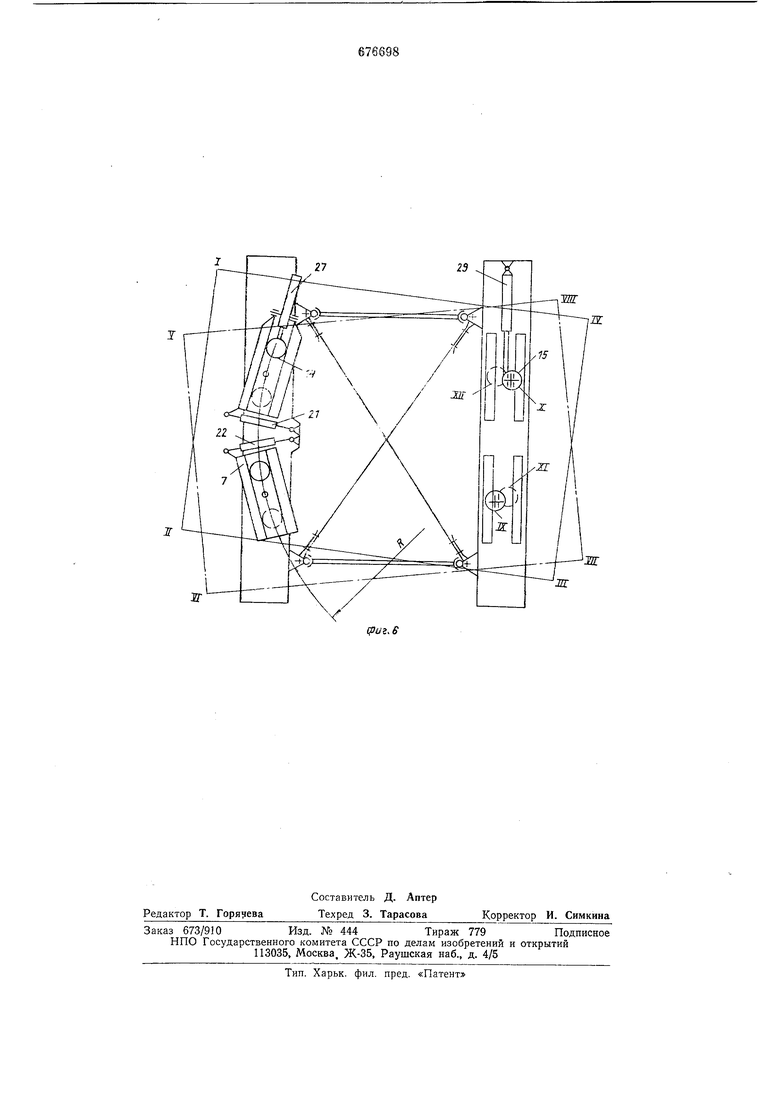
Для движения по радиусу поднимают над грунтом лыжи 7 и 2 и поворачивают направляющие б и 7, как это показано на фиг. 6. Поворот направляющих приводит к отклонениям гидроцилиндров 15 в положения IX и X и изменению положения лыж I и П (их повороту) относительно рамы 13, причем гидроцилиндры 27 29 ъ процессе поворота направляющих находятся в плавающем положении. После подъема рамы относительно грунта поворот ее из положений I, II, III и IV в положения V, VI, VII и. VIII (фиг. 6) осуществляется по радиусу R при нагнетании рабочей жидкости в порщ)евые полости гидроцилиндров 27 и 29, соответствующие полости которых сообщены в процессе поворота. В процессе движения по радиусу механизмы 15 отклоняются в положения XI II XII при незначительном движении вдоль лыжи 2. Применение изобретения позволяет значительно повысить маневренность щагающей машины, что дает возможность устанавливать ее близко к откосу и тем самым исключить просыпание на почву полезного ископаемого, разрешает отводить мащину от откоса при его обрущениях, а передвигаться в криволинейных транщеях с местными обрущениями откоса без дополнительных операций по развороту мащины.
Кроме того, подвижное крепление подъемных механизмов к несущей раме позволяет устранить усилие распора между лыжами в процессе перемещения мащины, снизить мощность привода поворота, а также
уменьщить боковые нагрузки на элементы ходового механизма ввиду отсутствия скольжения лыж по грунту при разворотах.
Формула изобретения
Ходовой механизм щагающей машины, содержащий соединенные между собой дистанционирующими элементами две лыжи с прямолинейными направляющими для снабженных приводами перемещения ходовых тележек, на которых посредством подъемных механизмов установлена несущая рама с неподвижными опорами, отличаюшийс я тем, что, с целью повышения маневренности шагающей машины, направляющие одной из лыж установлены на вертикальных осях и снабжены приводом их поворота, а подъемные механизмы другой лыжи соединены с несущей рамой горизонтальными шарнирами.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР 222982, кл. Е 02 f 9/04, 1968.
2.Патент ФРГ jYs 1580632, кл. 63 с, 31, 1973.
J
IS
тН
фиг.1
Ж
(pLIi.S
IT
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| Ходовой механизм шагающего типа | 1977 |
|
SU746055A1 |
| Ходовой механизм шагающего типа | 1979 |
|
SU819284A1 |
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| ПЕРЕДВИЖНОЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ | 1999 |
|
RU2163972C2 |
| МАШИНА ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДА И РАБОЧИЙ ОРГАН | 1997 |
|
RU2112841C1 |
| ХОДОВОЙ МЕХАНИЗМ ТЯЖЕЛЫХ МАШИН | 1967 |
|
SU222982A1 |
| Транспортное средство для перевозкиКРупНОгАбАРиТНыХ ТяжЕлОВЕСНыХ гРузОВ | 1979 |
|
SU839777A1 |
| РАБОЧАЯ СЕЛЬХОЗМАШИНА | 2007 |
|
RU2436278C2 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ СТРЕЛОК И ПЕРЕСЕЧЕНИЙ ПУТИ | 1993 |
|
RU2062858C1 |