(54) ШАГАОДИИ МЕХАНИЗМ



| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовой механизм шагающего типа | 1977 |
|
SU746055A1 |
| Ходовой механизм шагающего типа | 1979 |
|
SU819284A1 |
| Шагающий ходовой механизм | 1976 |
|
SU653354A1 |
| Ходовой механизм | 1974 |
|
SU609892A2 |
| Механизм шагания шнекобуровой машины | 1981 |
|
SU989056A1 |
| Ходовой механизм шагающей машины | 1977 |
|
SU676698A1 |
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| Ходовой механизм шагающего типа | 1976 |
|
SU692949A1 |
| Шагающее ходовое оборудование | 1988 |
|
SU1546571A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
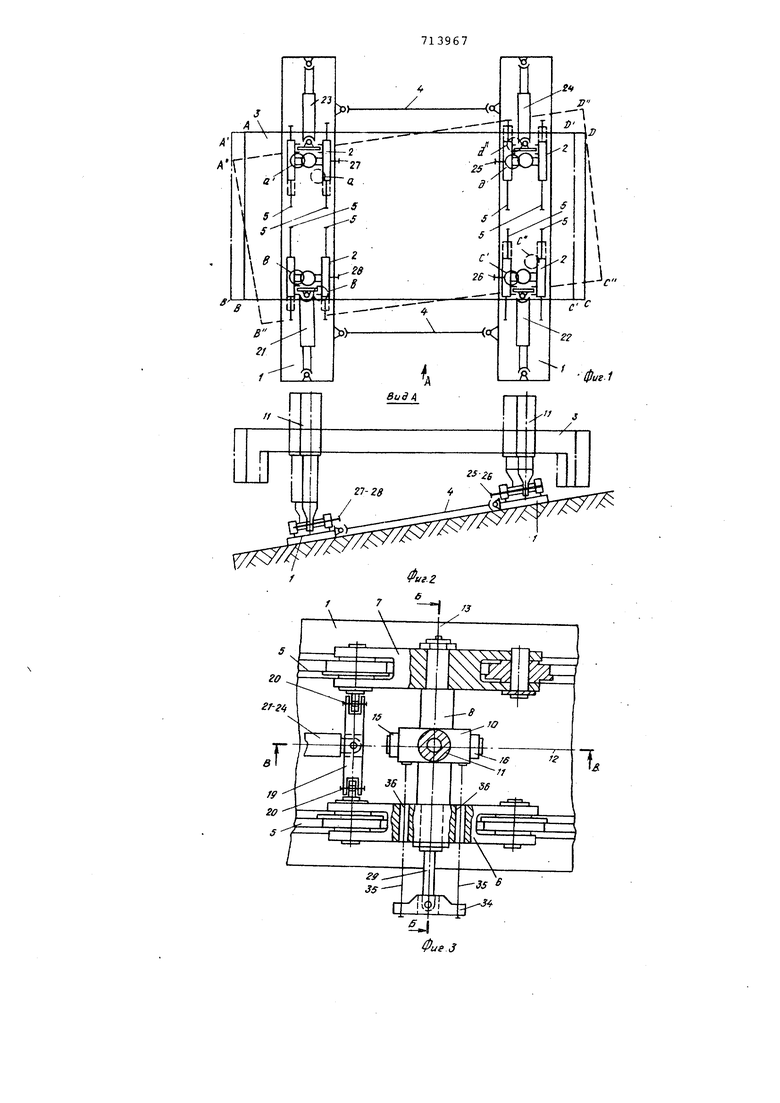

Изобретение относится к шагающим механизмам, предназначенным для пере мэщенйя тяжельс: машин и может бить использовано в землеройных, горнодобывающих и шнекобуровых машингис, предназначенных для выемки полезных ископаемых на открытых горных разработках. Применительно к шнекобуровым машинам шагающий механизм долже при минимальных габаритах по высоте и простоте управления, обесПЭчивать перемещение и маневрирозание мавмны в стесненных условиях эксплуатации. Известен шагаквдий механизм, содержащий соединенные между собой дистанционными элементами лыжи, снаб женные прямолинейными направляющими приводы перемещения и каретки, на которых посредством подъемньрс механизмов установлена несущая рама 1 Недостатком известного механизма является сложность его конструкции и управления в процессе движения, а также невозмох ность обеспечения движения несущей рамы строго в перпендикулярном направлении относительно продольной оси лыжи в связи с тем, что в процессе поперечного движения, осуществляемого поворотом площадок. оси гидроцилиндров, жестко связанных с рамой, описывают криволинейную траекторию. Это исключает возможность использования механизма хода для извлечения бурового става из обрушенной скважины, так как в процессе такого движения произойдет смещение машины в продольном напрашлении, а также искривление и заклинивание става в скважине. Наиболее близким к предложенному по технической сущности и достигаемому результату является шагающий механизм, включакщий несущую раму с приводом подъема, лыжи с прямолинейными направляющими и каретки с приводом продольного и поперечного перемещен ий, поперечной направлякщей и ползунами, связанными через опорные шарниры с приводом подъема 2. Однако в этоК: механизме привод поперечного перемещения установлен несоосно по отношению к поперечной направляющей каретки, что приводит к увеличению размерюв машины по высоте. Кроме того, несоосное приложение усилий к ползуну приводит к его перекосу, интенсивному износу направляквдих и увеличению усилия на перемещение. Недостатком также является крепление привода продольного перемещения к ползуну каретки, усложняющее управление мшииной в процессе поворота и ее поперечного движения вынужденного углового отклонения продольного привода. Когда машин находится на уклоне и продольные при воды зафиксированы, происходит перемещение несущей рамы вдоль лыж в про цессе поперечного движения, что за-трудняет ориентирование машины перед забуриванием и исключает возможность использования механизма хода для из ёлфчения бурового сТава из скважины. Связь опорного шарнира и ползуна, выдолненная в виде проушин, охватывайщих цапфы, при конструктивной проработке приводит к большим габарифам этого узла, приближающимся к величине поперечного хода ползуна, что снижает эффективность поперечного:шагания механизма. Целью изобретения является повышени-е маневренности и надежности шагагацего механизма. Поставленная цель достигается тем что привод поперечного перемещения расположен соосно с поперечной направлянвдей каретки,а привод продольного перемещения связан с кареткой через неподвижную в поперечном направлении часть каретки. При этом привод поперечного перемещения выпол нен в виде гидроцилиндра,гильзой ко торого служит поперечная направляющая, а шток его снабжен paзнeceнныj и опорами по внутреннему диаметру гиль зы и установлен с зазором по отношению к поршню, Контактирукщие поверхности ползунов и опорных шарниров вы полнены в виде участков цилиндрической поверхности с осью,проходящей че рез точку пересечения вертикальной оси опорного шарнира и горизонтальной оси поперечной направлякадей и перпендикулярно указанным осям,а опорный шарнир и ползун подвижно со диваны между собой. На фиг. 1 изображена схема механизма хода, вид сверху; на фиг, 2 - вид по стрелке А на фиг, 1; на фиг. 3- каретка, план; на фиг. 4 - разре S-S на фиг, 3; на фиг. 5- разрез В-В на фиг. 3; на фиг. б - разрез Г-Г на фиг, 5, Шагающий механизм включает лыжи каретки 2 и несущую раму 3. Лыжи 1 шарнирно соединены между собой жесткими элементами 4 и оснащены четырьм парами прямолинейных направляющих в виде рельсов 5 несущими каретки 2, каждая из которых выполнена в виде двух колесных пар с балансирами б и If связанными между собой шарнирно поперечной, направляющей 8. da напргш ляющую 8 подвижно насажен ползун 9,, который посредством опорного шарнира JO и гидроцилиндра подъема П дпоПиого действия поддерживает раму 3, Контактирующие поверхности ползуна 9 и опорного шарнира 10 выполнены в виде участков цилиндрической поверхности., ось 12 которой проходит через пересечение осей 13 и 14 поперечной направляющей 8 и опорного шарнира 10 и перпендикулярна им. Участок цилиндрической поверхности опорного шарнира 10 ограничен в направлении перемещения ползуна 9, Соединение опорного шарнира 10 и ползуна 9 выполнено с помощью серь г 15 и 16, посаженных на их цапфы 17 и 18, причем ось цапфы 17 совпадает с осью 12, а отверстия серы 15 и 16 на цапфах 17 обеспечивают возможность сближения «шорного шарнира 10 и ползуна 9. Каретки 2 снабжены траверсами 19,соединенными шарнирами 20 с балансирами б и 7 и связанными с ними гидроцилиндрами 21, 22, 23, 24 одностороннего дейстйия. Кроме этого, каретки 2 оснащены гидродвигателями 25, 26, 27, 28 поперечного перемоцения, каждый из которых выполнен в виде гидроцилиндра одностороннего действия и гильзой которого является поперечная направлягсщая 8, а шток 29 снабжен раз-несенными опорами в виде дис8, и отделен от поршня 32, расположенного в рабочей полости 33, С внешней: стороны шток 29 посредством шарнирного коромысла 34 и гибких связей 35, пропущенных через отверстия 36 в балансирах б, соединен с ползуном 9 по его оси. Рабочие площади гидроцилиндров 21-24 равны между собой, причем полости 21 и 22 сообщены гидролинией, в подводящем трубопроводе которой установлен гидрозамок двухстороннего действия„ Полости продольных гидроцилиндров 23 и 24 соединены аналогично между собой, в подводящий трубопровод подсоединен ко второму клапану упомянутого гидрозамка, ria балансирах 6 и 7 кареток 2 смонтированы захватные ролики 37, взаимодействующие с рельсами 5 прямолинейных направляквдих лыж 1. Устройство работает следующим образом. При поднятой над грунтовым основанием несущей раме 3 и необходимости ее продольного перемещения включают подачу рабочей жидкости в рабочие полости гидроцилиндров 21 и 22, а полости гидроцилиндров 23 и 24 соединяют с гйдробаком, после чего каретки 2 с несущей рамой 3 перемещаются по прямолинейным направляющим лыж 1. По завершении продольного перемещения соединяют поршневые полости гидроцилиндрой подъема 11 со сливом, а в их штоковые полости подают рабочую жидкость. Несущая рама 3 опускается и своими упорами ложится
на грунтовое оснорание, а лыжи 1 поднимаются для отрыва их от грунта и возможности беспрепятственного перемещения при последующей операции шагания. При этом захватные ролики 37 кареток 2, взаимодействующие с рельсами 5, а также серьги 15 и 16, связанные с опорными шарнирами 10, удерживают лыжи от опускания. После перегона поднятых лыж в направление последугацего движения производят их опускание и подъем несущей рамы 3 для движения ее по лыжам. При вертикальных перемещениях несущей рамы на уклонах (фиг. 2) расстояние между шарнирами крепления гидроцилиндров подъема 11 к каретка 2 изменяется. Для устранения распорных усилий между гидроцилиндрами подъема 11 во взаимно перпендикулярных направлениях в процессе выравнивания рамы в каждом гидрозамке поперечных и продольных гидроцилиндров открывается один из клапанов, сообщейнный с наименее нагруженными гидроцилиндрами, открытие соответствукщих клапанов в гидрозамках позволяют самоустанавливаться кареткам 2 и ползунам 9 на направляющих, что исключает возникновение распорных усилий между гидроцилиндрами подъема. При поднятой над грунтовым основанием несущей раме 3 и необходимости ее поперечного перемещения, например, из положения ABCD в положение д в с о (фиг. 1) включают подачу рабочей жидкости в полости 33 гидроцилиндров 25, 26, а рабочие полости 33 гидроцилиндров 27, 28 соединяют со сливом. Ьри неподвижных лыжах 1 и каретках 2, штоки 29 гидроцилиндров 25 и 26 перемещают ползуны 9 посредством коромысел 34 и гибких связей 35 из положения abed в положение abcd и вместе с ними несущую раму 3. При перемещении ползунов 9 п поперечным направляющим 8 угловое положение гидроцилиндров21, 22, 23, 24 продольного перемещения не изменяется в связи с тем, что они соединены посредством траверс 19 и шарниров 20 с балансирами 6 и 7, являющимися неподвижной в поперечном направлении частью каретки 2. Это упрощает управление и дает возможность осуществления строго поперечного перемещения несущей рамы 3 даже при расположении лыж 1 на продольном уклоне и зафиксированных при этом гидроцилиндрах 21, 22, 23, 24, что применительно к шнекобуЕЮВ-ой машине позволяет использовать механизм хода для извлечения бурового става из скважины, а также облегчает ориентирование машины перед забуриванием.
При необходимости поворота несущей рамы 3, например, из положения ABCD в положение А в С D (фиг. 1), включают подачу рабочей жидкости в рабочие полости-33 гидроцнлиндров 25
28 поперечногО перемещения, а рабочие полости гидроцйлиндров 26, 27 поперечного перемещения соединяют со сливом. Происходит поперечное перемещение ползунов 9 из положения abed в положения а Ь с d на лыжах 1 и продольные перемещения кареток 2. В результате этого несущая рама 3 поворачивается на некоторый : угол,зависящий от величины поперечного хода ползунов 9. Так как соответ0ствующие продольные гидроцилиндры сообщены между собой, то они не оказывают влияния на поворот несущей рамы, поскольку при повороте происходит переток рабочей жидкости между
5 гидроцилиндрами 21, 22 и отдельно между гидроцилиндрами 23, 24. Движение несущей рамы под углом к продольным осям лыж может быть осуществлено продольными приводами По направляющим
0 лыж 1, предварительно повернутым на угол относительно несущей рамы. Во всех случаях шагания механизма для продольного и поперечного перемещения подтянутых к несущей раме 3 льис
5 1 необходим достаточный зазор между их опорными поверхностями и грунтовым основанием (фиг, 4). При этом расстояние между лыжами 1 и несущей рамой 3 должно быть минимальным во
0 избежание увеличения по высоте габаритов машины. Наиболее полно удовлетворяет этим требованиям данный механизм, в котором соосное с поперечной направляющей 8 расположение гидроцилиндров 25, 26, 27, 28 спо5собствует наиболее компактному решению этого узла, что в целом улучшает эксплуатационные качества и расширяет область использования механизма, в частности, применительно к шнеко0буровым машинам. Использование поперечных направляющих 8 в качестве гильз гидроцилиндров 25, 26, 27, 28 не приводит к их заклиниванию при возможном прогибе направляющих 8 от
5 внешних нагрузок благодаря тому, что поршни 32 отделены от штоков 29, а также из-за малого отношения их длин к диаметрам. Шток 29 имеет повышенные зазоры между своими опорными диска.ми 30, 31 и гильзой. Эти зазоры обес0печивают проход иггока 29 по изогнутой гильзе. Для увеличения шага при поперечном шагании механизма опорный шарнир 10 лишь частично охватывает ползун 9, контактируя с последним
5 по цилиндрической поверхности только в верхней его части. Это позволяет сократить габарит по ширине .узла в направлении перемещен1.ч по поперечной направляющей 8. При этом серь0ги 15 и 16 не препятствуют передаче усилий от опорного шарнира 10 на ползун 9, допуская сближение цапФ 17 и 18, но удерживают узел замкнутым при отрыве лыж 1 от грунтового основания
5 9. Предложенный механизм хода расширяет область применения машины, повышает надежность и упрощает упран.лёние. Конструктивное вьшолнение поперечного привода позволяет опустить несуа1ую раму, что уменьшает подрывку почвы. При подготовке траншеи, необходимой для нормальной эксплуатации шнекобуровой машины, подры ка почвы уменьшается по сравнению с прототипом, на величину до 0,3 м по веей длине траншеи, что сокращает объем вскрьжяи, а также стоимость и сроки подготовительных работ, ; При поперечном ходе связь продоль ного привода с балансирами каретки устраняет угловое отклонение продоль ных приводов, обаспечивая ос1т1ествле нйе строго поперечного перемещения МИШИНЫ. ДБи.жение машины в поперечнфм направлении может создать дополн тельные усилия для смещения буровфго става при его зажиме в сква Есине или обеспечить оперативный отвод машины в случае возникновения опасности обрушения борта уступа. Возможность поперечного перемещения маШИНЫ на забой без ее смещения вдоль продольной оси ЛЕлжи позволяет уменьшить ход или устранить установку на машине вьщвижного приемного лотка, п едназначенного для перекрытия пространства между забоем и машиной. Кроме того, наличие такого хода позв ляет более оп-еративно установить щнекобуровую машину к забою в случа его искривления, а при возникновении опасности или обруи ении борта - выве ти машину из опасной зоны. При этом соосноё приложение нагрузок к ползуну уменьшает нзнос и повышает срок службы цилиндрической поперечной направлягацёй каретки и ползуна. Повышение маневренности и упр эвде.нйе управления машиной сокращает время на ее установку перед забуриванием, увеличивая производительно ст машины, устраняя возможность ее аварии при обрушении борта уступа и повьиаая безопасность ведения работ. Формула изобретения 1.Шагакнций механизм, включакищй Hecjmjyra раму с приводом подъема, лыжи с .прямолинейными направляющими, каретки с приводом продольного и поперечного перемещения, поперечной направляющей и ползунами, связанными через опорные шарнирлз с приводом йодъема, отличающийся тем, что, с целью повьгшения маневренности и надежности, привод поперечного перемещения расположен соосно с поперечной направляющей каретки, а привод продольного перемещения связан с кареткой через неподвижную в поперечном направлении часть каретки. 2.Шагаквдий механизм по п.1, о тличающийс я тем, что привод поперечного перемещения выполнен в виде гидроцилиндра, гильзой которого служит поперечная направлякядая, а шток его снабжен разнесенными опорами по внутреннему диаметру гильзы и установлен с зазором по отношению к поршню. 3.Шагающий механизм по п.1, 2, отличающийся тем, что контактирующие поверхности ползунов и опорных шарниров выполнены в виде участков цилиндрической поверхности с осью., проходящей через точку пересечения вертикальной оси опорного ийрнира и горизонтальной оси поперечной направляющей и перпендикулярно указанным осям, а опорный шарнир и ползун подвижно соединены между собой. Ис точни ки и нформации, принятые во внимание при экспертизе 1.Авторское свидетельство по заявке № 2493157/29-03, кл. Е 02 F 9/04, 26.5.77. 2,Авторское свидетельство по заявке № 2545943/29-03, кл, Е 02 F 9/04 22.11.77 (прототип).
I
//xSx/xSx/x vxxN ; xN / V4V /;г ХЧV .-з„|Фиг. S /ЛV
