1
Изобретение относится к горной промышленности.
Известны шагающие ходовьте механизмы для шнекобуровых машин, содержащие продольные лыжи с опорными плитами и несущую раму, посредством гидродомкратов установленную на опорных плитах, каждая из которых соединена со штоком гидроцилиндра р. .
Такие ходовьте механизмы обеспечивают певорот машины за счет торможения одной из лыж или . встречного перемещения обоих.
Вследствие взаимодействия опорньтх поверхностей льпк с грунтом на элементах механизмов возникают скручивания. , Этим обусловливается увеличение нх размеров, а следовательно, н веса.
Известен другой шагающий ходовой механизм, содержащий поперечные лыжи с тележками, продольные лыжи с опорными плитами и несущую раму, посредством гицродомкратов установленную на те(ежках и опорных, .плитах, каждая из которых соединенн со штоком гндроиилиндра, связанно
2
с гидродомкратом и вьтполненного с полуосими. 12 .
Такая конструкция шагающего ходового механиама обеспечивает поворот машины без взаимодействия опорных поверхностей лыж с грунтом за счет принудительного перемещения тележек по криволинейным направляющим, которыми снабжены опорные плиты. Однако она не обеспечивает достаточно высокой маневренности машины,
Ш поскольку ОП.Ш1 пикл шагания ее соответствует повороту на относительно небольшой yroji. Кроме того, влецствие применения тележек повышается клиренс машины.
Цель изобретения - повышение манев5ренности.
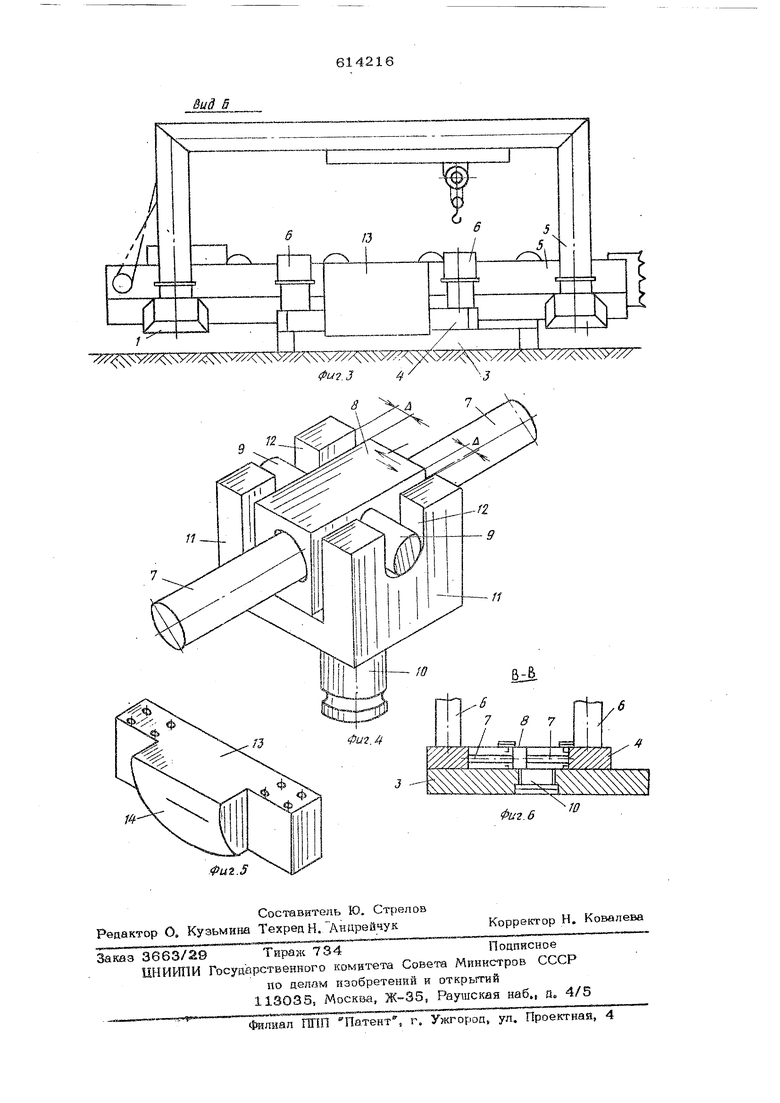
Эта цель Достигается тем, что каждая из продольньпс снабжена вертикальным валом с кронштейнами, в пазах которых с возможностью осевого смещения установле«ны полуоси гипродомкратов, а рама снабжена вертикальными кронштейнами, которые выполнены с криволинейньпчш скосами для взаимодействия с боковыми поверхностями продольной лыжи. На фиг. 1 изображен описываемый шага кшшй ходовой механизк-f для шнекобуровой машины, вид сперецй| на |Я1г. 2 - разрез А-А фйг, 1| lia 4й5Г, 3 - вид Б фйг, 1{ на фиг. 4 - вертикальный вал продольной лыжн в сборе с гяароцилиндром5 на фиг, 5 вертйкалыилтй кронштейи| иа фиг. 6 - разрез В-В фиг. 2, Шагающий ходовой механизм для шнек буровых Mamsra включает поперечные лыжи 1 с тележками 2, продольные лыжи 3 с опорньмн плитами 4, несущую раму 5, по спедством гидроцомкратов 6 установленную на тележках и опорных плитах, каждая из которых соединена со штоком 7 гидропилинара 8, связанного с гидродомкратом и выполненного с по/гуосями 9, Каждая пропольная льйкй снабжена ьертикальпым валом iO с кронштейнами 11, п пазах 12 которьХ с возможностьрэ осевого смещения на 2 .|i установлены полуоси гнд роцнлиппра Рама имеет вертикальные крон штейны 13, которые выполнены с криволр нейными скосами 14 для взанмодействия с боковинами 15 продольных лыж. Плиты П5эопущены в ограничительных петлях 16, укрештенных на лыжах. Лыжи 1 шарнирно связаны гидроцплннцрами 17 с тележками 2, Для передвижения машины по оси лыжи при исходном положении рамы 5 рабочую жидкость подают в соответствующую рабочую полость гидропт линдра 8. Благодаря этому 7 перемещают плиты 4 по лы жам 3, а вместе с ними раму 5, т.е. шне- кобуровую машину. При этом сопротивлени пыж 3 их перемещению обеспечивается гид цилиндрами 8 через вал 10 и кронштейны Для поворота машины включают: только один гидроцилиндр 8 КПП же обеспечивают движение их штоков 7 в противоположных направлениях. Радиальное смещение плит 4 и падроиилйндров 8 от осей валов Ю компенсируется зазорами, 4 , что исклю чает поломки. Поворот машины за оцин пик возможен только в пределах, ограничиваем петлями 16. Для последующего пёремешения или пов рота машины раму 5 принодш-тмают на лыж li гндродомкратамп , а льшсп 3 с плитами 4 подтягивают другими домкратами к раме 6 4 вследствие этого лыжи 3, ра рнувшиеся ранее на плитах 4 при начальном повороте машины, взаи одействуют боковипами 13 со скосами 14 и занимают первоначальное положение. Домкратами льтжи 3 перемешают в исходное положение, машину опускают на лыжи 3, а лыжи 1 подтягивают гиародомкратамн к раме 5, Далее процессы передвижения и поворота машины повторяют. Передвижение машины по направлению, перпендикулярному описанному, вьтолняется по лыжам 1 перекатом на тележках 2 с помошью гядроцйлиндров 17. Таким образом, предлагаемый шагаюший ходовой механизм позволяет осуществлять взаимно перпендикулярные перемещения машины по лыжам 1 и 3 и поворот ее на пы жах 3. Наличие скосов 14 обеспечивает автоматическое ориентирование лыж 3 в исходные положения, а отсутствие тележек под центром рамы уменьшает клиренс рамы. Этим повышается маневренность передвижения машины и у.-1еньшается объем горных работ при подготовке рабочей площадки для установки машины. Формула изобретения Шагающий ходовой механизм для шнекобуровых машин, включающий поперечные лыжи с тележками, продольные лыжи с опорными плитами и несущую раму, посредет вом гидродомкратов установленную на тележках и onopHbix плитах, каждая из.которых соединена со штоком гидропилиндра, связанного с гидродомкратом и вьшолненного с полуосями, отличающийся тем, что, с целью повышения маневренности, каждая из продольных ль1ж снабжена вертикальным валом с кронштейнами, в пазах которых с возможносаъю осевого смещения установлены полуоси гидродомкратов, а рама снабжена вертикальными кронштейнами, которые вьшолн1вны с криволинейными скосами для взаимодействия с боковыми поверхностями продольной лыжи. Источники информации, принятые во внимание при экспертизе: 1,Авторское свидетельство № 3S0955, кл. Е 21 С 29/22, 197О. 2.Авторское свидетельство № 399599, кл, Е 21 С 27/22, 197О, Фт. 1 
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий ходовой механизм | 1981 |
|
SU1032124A1 |
| Шагающее ходовое оборудование | 1973 |
|
SU702129A1 |
| Шагающий ходовой механизм | 1976 |
|
SU653354A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1330338A1 |
| Ходовой механизм шагающей машины | 1977 |
|
SU676698A1 |
| Шнекобуровая машина | 1978 |
|
SU744127A1 |
| Ходовой механизм шагающего типа | 1979 |
|
SU819284A1 |
| Опорная тележка шагающего ходового механизма тяжелых машин | 1983 |
|
SU1112099A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ УСТРОЙСТВО | 1992 |
|
RU2019645C1 |
| Шагающее ходовое оборудование | 1983 |
|
SU1142605A1 |