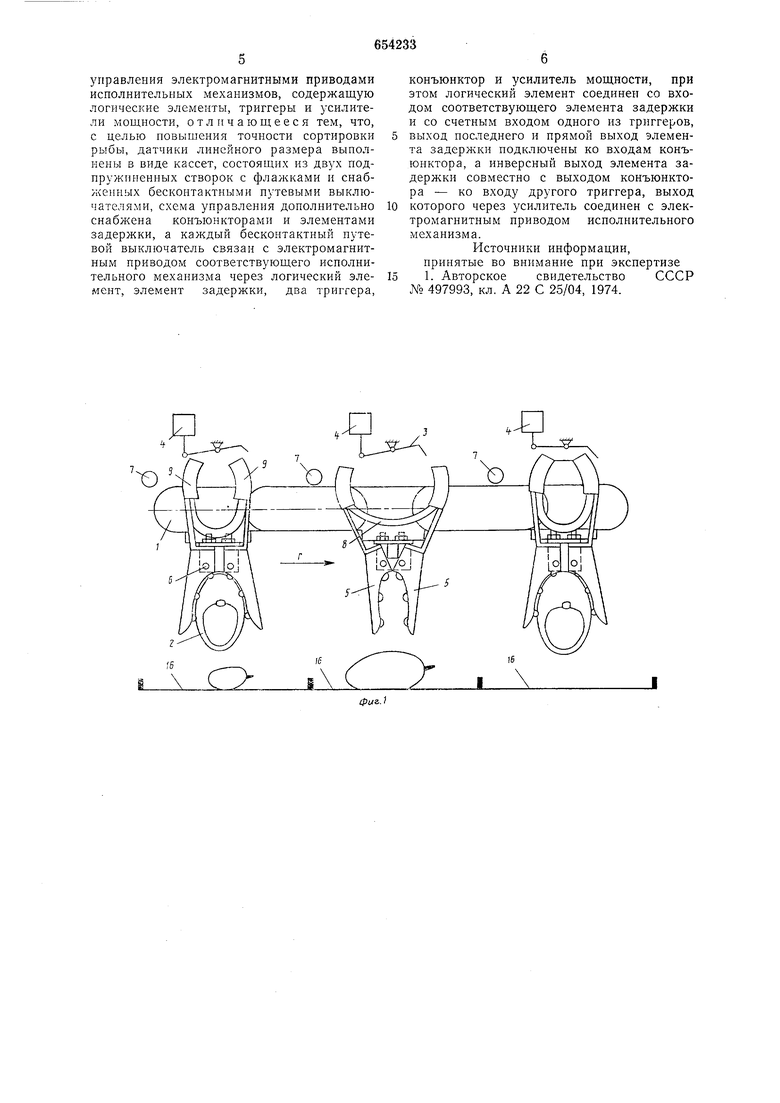
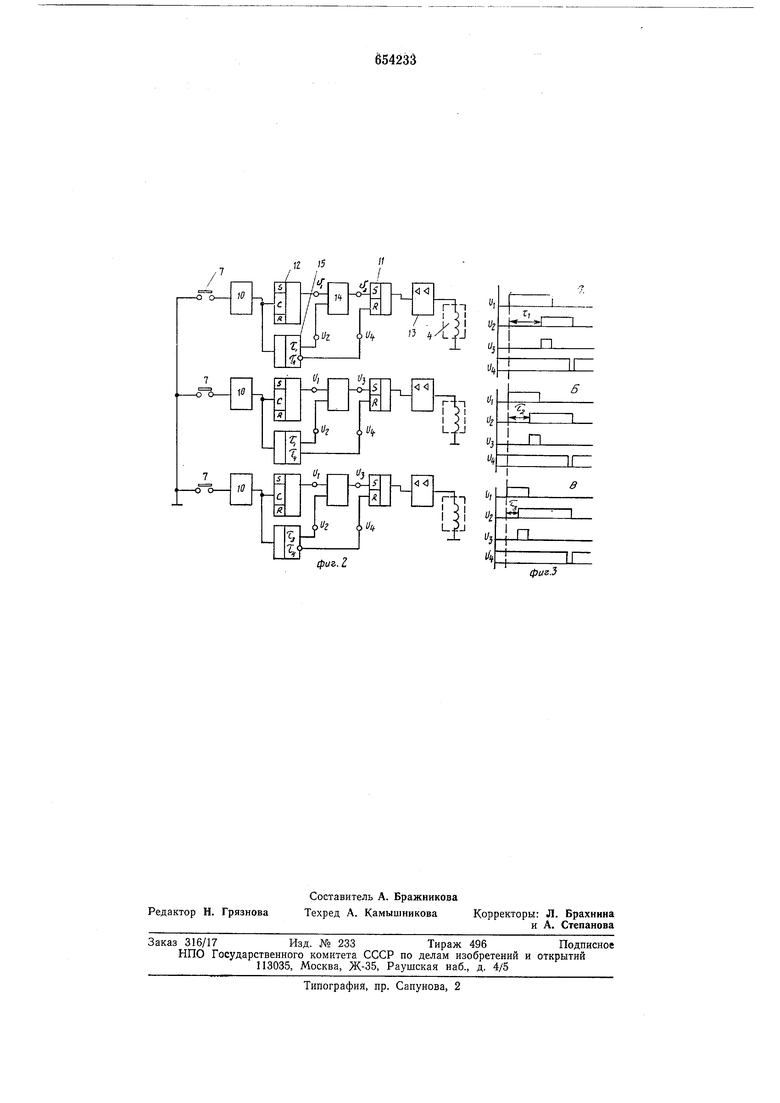
Датчики линейного размера рыбы выполнены в виде кассет, состоящих из двух створок 5, поворотных одна навстречу другой вокруг осей 6, и бесконтактных путевых выключателей 7. Обе створки 5 находятся под воздействием пружины 8 и связаны между собой с помощью пары зубчатых секторов (на чертеже не показаны), соосных осям 6. Посредством пружины 8 обе створки 5 настроены на минимальный размер рыбы. Не соприкасающиеся с рыбой концы створок 5 снабжены флажками 9, относительно которых путевые выключатели 7 установлены неподвижно. Схема управления (фиг. 2) электромагнитными приводами исполнительных механизмов содержит логические элементы 10, триггеры 11 и 12, усилители 13 мощности, конъюнкторы 14 и элементы 15 задержки. Каждый бесконтактный путевой выключатель 7 датчика линейного размера рыбы связан с электромагнитным приводом 4 соответствующего исполнительного механизма 3 через логический элемент 10, элемент 15 задержки и со счетным входом («С) триггера 12. Выход триггера 12 и прямой выход элемента 15 задержки подключены ко входам конъюнктора 14. Инверсный выход элемента 15 задержки совместно с выходом конъюнктора 14 подключены ко входу триггера 11, выход которого через усилитель 13 мощности соединен с электромагнитным приводом 4 исполнительного механизма 3. Для сбора отсортированной рыбы служит приемник 16. Устройство работает следующим образом. По мере движения транспортера 1 тушки 2 рыбы, уложенные в кассеты, последовательно проходят все стадии обработки механизмами (на чертеже не показаны), расположенными над транспортером, и, удерживаясь створками 5 кассет, попадают под транспортер, двигаясь по стрелке «Г. Флажки 9, расположенные на створках 5 кассет, воздействуют на путевой выключатель 7, в результате чего на входе логического элемента 10 (фиг. 2) появляются два импульса, длительность временного интервала между которыми обратно пропорциональна максимальной толщине обрабатываемой рыбы. С помощью триггера 12 формируется сигнал Ui (фиг. 3-А, 3-Б, 3-В) длительностью, обратно пропорциональной максимальной толщине обрабатываемой рыбы. Процесс сортировки рыбы на три размерные группы осуществляется следующим образом. Первый по ходу движения транспортера 1 приемник 16 рыбы предназначен для мелкой рыбы, второй - для средней и третий - для крупной, а первая из сортируемых рыб является самым крупным видом. Все схемы управления электромагнитными приводами 4 являются однотипными, но каждый из ее элементов 15 задержки имеет различные времена; ть та и тз задержки (фиг. 2 и фиг. 3-А, 3-Б, 3-В, кривые t/s), при этом время TI соответствует максимальной толщине наименьщего из видов сортируемой рыбы, время Т2 - максимальной толщине вида рыбы, граничного между мелкой и средней размерными группами, время Тз - максимальной толщине вида рыбы, граничного между средней и крупной размерными группами. Таким образом, когда в кассете лежит крупный экземпляр рыбы, длительность импульсов f/i, сформированных триггерами 12, будет небольщой и на выходе конъюнктора 14 первых двух схем управления электромагнитными приводами 4 будут нулевые сигналы. Единичный сигнал U появится только на выходе конъюнктора 14 последней схемы управления электромагнитом 4 (фиг. 3-В), который пустит триггер 11 (R-S) и через усилитель 13 мощности заставит сработать электромагнитный привод 4. С помощью исполнительного механизма 3 осуществляется раскрытие створок 5 кассеты и рыба попадает в последний приемник 16. Нулевым сигналом U, появляющимся на инверсном выходе элемента 15 задержки через время Т4, система возвращается в исходное положение. Если кассета транспортирует мелкую рыбу, то на выходе конъюнктора 14 первой схемы появляется сигнал Uz (фиг. 3-А), посредством которого запускается триггер 11 первой схемы управления, электромагнитный привод 4 раскрывает о помощью исполнительного механизма створки кассеты и обеспечивает сбрасывание мелкой рыбы в первый приемник 16. Предлагаемое устройство для сортировки рыбы обеспечивает по сравнению с известным повышенную точность сортировки рыбы. Это устройство может быть применено в существующих одно- или многооперационных машинах для разделки рыбы, которые в этом случае, кроме своих основных функций разделки рыбы, смогут осуществить также сортировку разделанной рыбы, что повысит производительность труда и обеспечит снижение себестоимости выпускаемой продукции. Формула изобретения Устройство для сортировки рыбы, включающее транспортер, датчики линейного азмера рыбы, исполнительные механизмы электромагнитными приводами и схему
управления электромагнитными приводами исполнительных механизмов, содержащую логические элементы, триггеры и усилители мощности, отличающееся тем, что, с целью новышеиия точности сортировки рыбы, датчики линейного размера выполнены в виде кассет, состоящих из двух подпружиненных створок с флажками и снабженных бесконтактными путевыми выключателями, схема управления дополнительно снабжена конъюнкторами и элементами задержки, а каждый бесконтактный путевой выключатель связан с электромагнитным приводом соответствующего исполнительного механизма через логический элемент, элемент задержки, два триггера.
конъюнктор и усилитель мощности, при этом логический элемент соединен со входом соответствующего элемента задержки и со счетным входом одного из триггеров, выход носледнего и прямой выход элемента задержки подключены ко входам коиъюнктора, а инверсный выход элемента задержки совместно с выходом конъюиктора - ко входу другого триггера, выход которого через усилитель соединен с электромагнитным приводом исполнительного механизма.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 497993, кл. А 22 С 25/04, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отрезания хвостового плавника рыб | 1977 |
|
SU676259A1 |
| Устройство для загрузки рыбы вРыбОРАздЕлОчНую МАшиНу | 1978 |
|
SU797636A1 |
| Устройство для удаления внутренностей рыбы | 1976 |
|
SU731944A1 |
| Машина для укладки рыбы в банки | 1980 |
|
SU971204A1 |
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Устройство для загрузки рыбы в рыборазделочную машину | 1977 |
|
SU738574A1 |
| Устройство для сортировки рыбы | 1975 |
|
SU573145A1 |
| Машина для укладки рыбы в банки | 1979 |
|
SU822802A1 |
| Устройство для измерения линейных размеров рыбы, лежащей в лотках | 1976 |
|
SU627312A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
12 5
cpuz.Z
фиг.З
