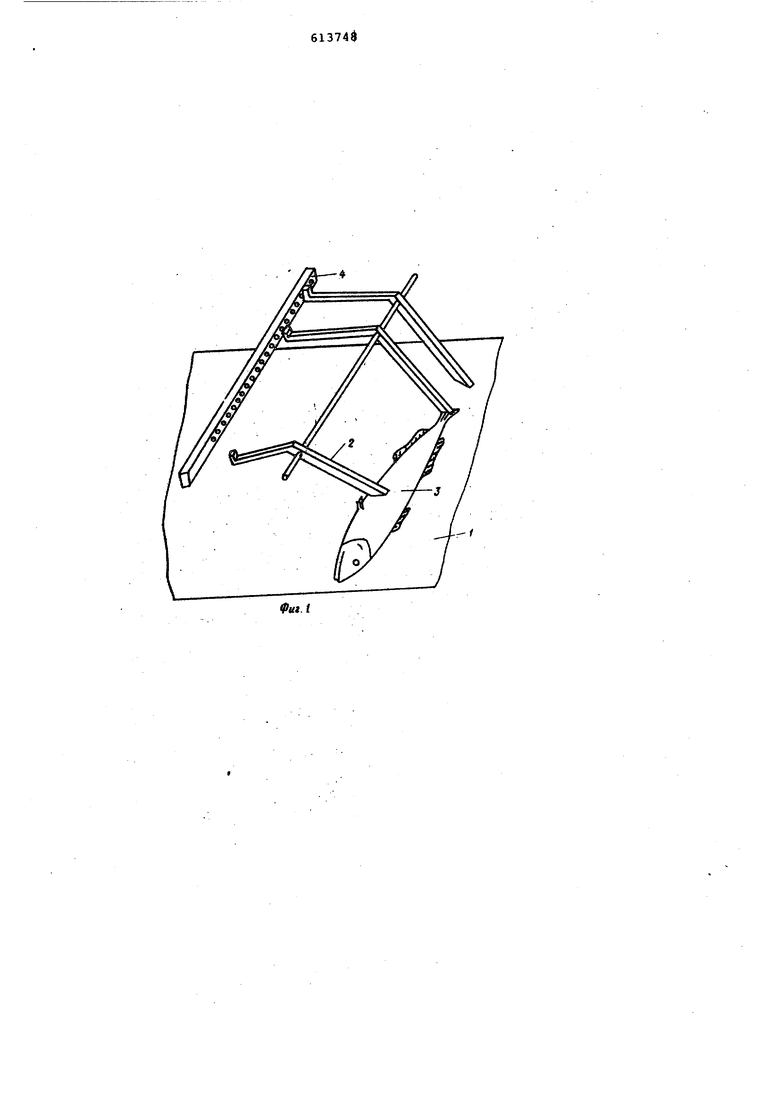
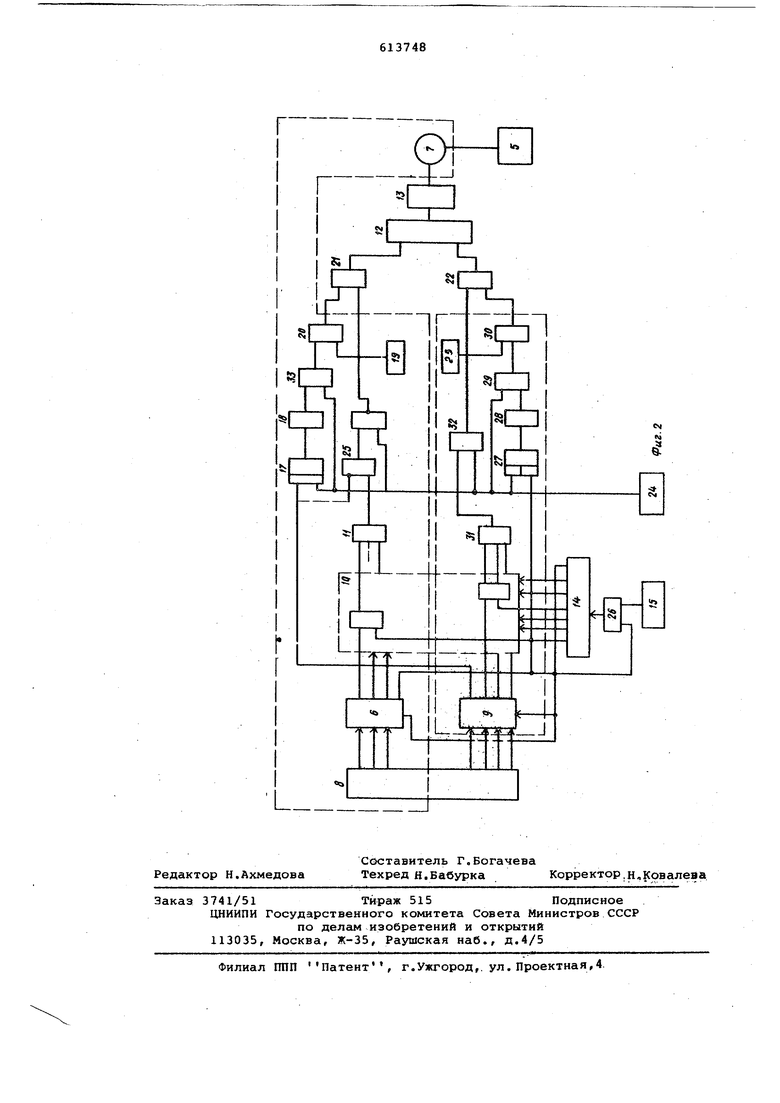
(54) УСТРОЙСТВО ДЛЯ НАСТРОЙКИ РАБОЧЕГО ОРГАНА ОДНООПЕРАЦИОННОЙ РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ ше минимально возможного; так как раз мерь рыб в уловах подчиняются нормаль ному закону распределения, суммарный путь при возвращении рабочего органа в среднее положение будет меньше Целью данного изобретения является увеличение производительности (сокращение времени холостых ходов и возврата рабочего органа в исходное положение) . Указанная цель достигается тем, что известное устройство для настройк рабочих органов однооперационной рыборазделочной машины, содержащее прис пособление для измерения длины рыбы, состоящее из укрепленных над транспортером параллельно один другому поворотных двуплечих рычагов для ощупывания нижними концами рыбы, измерительного рычага, исполнительного механизма и системы управления исполнительным механизмом, содержащей блок памяти, шаговый двигатель исполнитель ного механизма, фотодатчики, установленные в измерительном рычаге и соединенные со входами блока памяти, выход которого посредством конъюнктора, дизъюнктора, коммутатора и усиди.теля подключен к шаговому двигателю исполнительного механизма, и соединен ные между собой распределитель и гена тор импульсов, при этом блок памяти связан при помощи запрещающего входа триггера, элемента задержки, конечно го выключателя и крнъюнктора со входом коммутатора, а выход распределите ля импульсов через конъюнктор - со входом дизъюнктора, снабжено дополнительной системой управления исполнительным механизмом, конструктивное выполнение которой аналогично основной, при этом вход дополнительной сис темы соединен с фотодатчиками,, а выходы каждой системы управления посредством дизъюнктора связаны со входами коммутатора На фиг.1 изображено приспособление для измерения длины рыбы; на фиг 2 - структурная электрическая схема управления шаговым двигателем. Предлагаемое устройство содержит .приспособление для измерения длины рыбы, состоящее из укрепленних над транспортером 1 параллельно один другому поворотных двуплечих рычагов 2 для ощупывания нижними концами рыбы З; измерительного ;рычага 4, исполнительного механизма 5 и системы управления испс&хнительным механизмом, вклю чающей блок 6 памяти, шаговый двига fejib 7 исполнительного механизма. Фо тодатчики 8, установленные в измерительном рычаге 4 и соединенные с блоком памяти 6 и 9, выход которого посредством блока 10конъюнкторой,, дизъюнктора 11, коммутатора 12 и усилителя 13 подключен к шаговому дви гателю 7 исполнительного механизма 5, и соединенные между собой распределитель 14 и генератор 15 импульсов; при этом выход блока памяти 9 связан при помощи запрещающего входа триггера 17, элемента задержки 18, конечного выключателя 19, конъюнктора 20 со входом коммутатора 12, а выход распределителя импульсов 14 через конъюнктор 10 - со входом дизъюнктора 11; кроме того оно снабжено дополнительной системой управления исполнительным механизмом, конструктивное выполнение которой аналогично основной, при этом вход дополнительной системы соединение фотодатчиками, а выходы каждой системы управления . посредством дизъюнкторов 21 и 22 связаны со входами вперед и назад коммутатора 12. Настройка рабочего органа рыборазделочной маишны осуществляется в зависимости от длины обрабатываемой рыбы. При загрузке в кассеты 1ли без них экземпляры рыб укладывают перпендыкулярно движению транспортера с фиксацией рыла в подвижную опорную планку. Фотоэлектрические датчики устанавливбиот над транспортером таким ОбразрМ,чтобы охватить зону от наименьшей до наибольшей длины рыбы, подлежащей обработке . Рабочий орган (например), подвижная упорнгя планка для перемещения рыбы на рез головы по длине жаберных крышек или механизма перемещения кассеты с рыбой перпендыкулярно ее движению .на транспортере) связан с конечными выключателя 19 и 23 сигналы на выходах .которых исчезают только в среднем положении рабочего органа,соответствующем настройке на обработку среднестатистической рыбы данного вида. . Перемещение исполнительного механизмд 5 с помощью шагового двигателя 7 будет пропорционально числу импульсов, подаваемых на коммутатор 12 от генератора 24 импульсов . Объемы блоков б и 9 памяти,, т.е. число ячеек в каждом из них, определяется в зависимости от длины среднестатистической рыбы данного вида и заданной точности обработки. При этом наличие к сигналов на выходе фотодатчиков 8, говорит о том, что длина измеряемой рыбы равна среднестатистической и, так как рабочий орган в исходном положении установлен на обработку среднестатистической рыбы, то шаговый двигатель в этом случае работать не должен . Указанное условие обеспечивается подачей сигнала а из блока 9 памяти на запрещающий вход триггера 17 и запрета 25. При наличии на транспортере рыбы размером меньше среднестатистической фотодатчики выдадут i ч. к сигналов S пределах а ц.. Соответственно на выходах блока 6 памяти исчезнут и останутся сигналы gi + i--oi. сигналы а . Появившийся I +1 к-1 сигнал разрешает посредством конъюнк тора 26 прохождение импульсов от генератора 15 импульсов на вход распределители импульсов 14, с помощью которого начинается считывание инфор мации с,блока памяти 6, т.е. сигналов 5 J -f S д , число которых пропорционально разности длин средне статистической и измеренной рыбы. Эти сигналы поочередно через блок 10 конъюнкторов, дизъюн 5торов 11, зап рет 25, KqHbOHKTOp 27 позволяют пропускать серии импульсов от генератора 24 импульсов через дизъюнктор 22 на вход вперед коммутатора 12 где указанные импульсы преобразуются в трехфазную систему импульсов прямого чередования фаз и через усилитель 13 подаются на шаговый двигатепь 7, ротор которого вращается и перемещает связанный с ним исполнительный мехс-низм 5 в направлении вперед. Число серий импульсов генератора 24 будет равно числу i сигналов фотодатчика 8. По окончани процесса считывания и, следс1вательно движения вперед, по истечении времени , необходимого на остановку исполнительного механизма для проведения технологической операции,произ водится возвращение его в исходное состояние, фиксируемое конечным выкл чателем 23. Формирование сигнала н осуществляют следующим образом По окончании процесса считывания, т после выработки распределителем 14 импульсов сигнала . последний стирает память в блоке 6 памяти, вследствие чего исчезает сигнал и на выходе триггера 27 появляется потенциальный сигнал, так как на его вход 5 поступают импульсы от генератора 24 импульсов. Этот сигнал с задержкой, обеспечиваемой элементом 28, разрешает посредством конъюнктор 29 и 30 и дизъюнктора 22 пропускание импульсов генератора 24 на вход на зад коммутатора 12. В коммутаторе 12 указанные импульсы преобразуются в систему импульсов обратного чередования фаз и через усилитель 13 подаются на шаговый двигатель 7, ро которого вращается в обратном направ лении , перемещая исполнительный механизм в исходное среднее положение в котором исчезает сигнал на выходе конечного выкЛючателя 23,прекращает прохождение импульсоё через конъюнк тор 30, и шаговый двигатель остаНав ливает исполнительный механизм 5 в среднем положении. При наличии на транспортере рыбы размером больше среднестатистическо на выходе фотодатчиков 8 появляются tti К сигналов в пределах oTdiTdv-i При этом наличие сигнала d -запретит работу элементов, формирующих сигнал на входе вперед коммутатора 12. На выходе блока 6 отсутствуют все сигналы, кроме or j , который разрешает работу распределителя 14 импульсов. Считываемые сигналы с выхода блока 9 памяти через блок 10 конъюнкторов, дизъюнктор 31, конъюнктор 32 и дизъюнктор 22 пропускают серию импульсовс генератора 24 импульсов на вход назад коммутатора 12. По окончании процесса считывания сигналом производится стирание памяти в блоках 6 и 9 памяти, в результате чего исчезает сигнал И у , Это приводит к появлению потенциального сигнала на выходе триггера 17, который через задержку 18 подается на конъюнктор 33, в результате чего импульсы с генератора 24 через конъюнкторы 33 и дизъюнктор 21 подаются на вход вперед коммутатора 12, чем обеспечивается возвращение рабочего органа из положения, соответствующего большой рыбе, в среднее положение, соответствующее среднестатистической рыбе. Остановка рабочего органа в среднем положении при движении в сторону вперед осуществляется исчезованием сигнала с выхода конечного выключателя 19. Перенастройку устройства для обработки вида рыбы осуществляют путем изменения частоты генератора 15 импульсов и перемещением приспособления для измерения длины рыбы над конвейером таким образом, чтобы для среднестатистической рыбы нового вида на его фотодатчиках 8 формировались сигналы а j f а к . Увеличение производительности рабочего органа, а вместе с ним и увеличение производительности рыборазделочной машины происходит в предлагаемом устройстве за счет возвращения рабочего органа после обработки рыбы в исходное положение, соответствующее величине среднестатистической дйлбы встречающейся в уловах. Известно, что распределение рыб разной величины в уловах подчиняется нормальному закону. Суммарный путь U ц , проходимый исполнительным механизмом во время настроечных операций при обработке одной выборки рыбы, если механизм возвращается после обработки каждого экземпляра в положение, соответствующее минимальной рыбе, определяется выражением: « (О где t - путь, проходимый механизмом при обработке рыб одинаковой длины для заданного i - ГО интервале Длин; m i- плотность относительной частоты (плотность вероят ности, приходящаяся на принятый интервал длин); П - число интервалов в выборк При возвращении исполнительного механизма после каждой операции в положение, соответствующее среднеста тистической рыбе, суммарный путь, проходимый исполнительньом механизмом при обработке одной выборки рыб, определяется выражением: |(е,р-е)|т|, (ГДв f путь, проходимый механиз мом при перенастройке с обработки с минимальной рыбы на среднестатистическую. Анализ гистограмм, например, нескольк.их выборок минтая по приведенным выше формулам показывает, что при выборе среднего положения в качестве исходного общий путь L с-р ока зывается в 2,3-2,65 раза меньше Ьуц Так как длина одного кадра транспортера (т. е. участка транспортера на на котором расположена одна рыба) ка правило выполняется постоянной, то увеличение производительности необходимо рассматривать для крайнего случая настройки на обработку макси.мальной рыбы е,,5.е где , маке соответственно путь, проходимый исполнитель ньдм механизмом ,из поло жения, соответствующег среднестатистической рыбе, и путь, проходимый исполнительным механизмом из положения соответствующего минимальной рыбе,в положенЦе, соответствующее максимальной рыбе. . При постоянной скорости движения исполнительного механизма время отработки одной наиболее продолжительной операции сокращается в два раза, что позволяет увеличить также в два раза скорость движения транспортера и вместе с ним увеличить в два раза производительность рыбораз делочной машины. Ориентировочный ожидаемый годовой экономический эффект от использования предлагаемого устройства на одной рыборазделочной мгшжне составит 9 тысяч рублей. Формула изобретения Устройство для настройки рабочего органа однооперационной рыборазделочной машины, включающее приспособление для измерения длины рыбы, состоящее из укрепленных над транспортером параллельно один другому поворотных двуплечих рычагов для ощупывания нижними концами рыбы, измерительного рычага, исполнительного механизма и системы управления исполнительным механизмом, содержащей блок памяти, шаговый двигатель исполнительного механизма, фотодатчики, установленные в измерительном рычаге и соединенные со входом блока памяти, выход которого посредством конъюнктора, дизъюнктора, коммутатора и усилителя подключен к шаговому двигателю исполнительного механизма, и соединенные между собой распределитель и генератор импульсов, при этом выход блока памяти связан при помсэди запрещающего входа триггера, элемента задержки, конечного выключателя и конъюнктора со входами кс 5мутатора, а выход распределителя импульсов через конъюнктор - со входом дизъюнктора, отличающеес я тем, что, с целью увеличения производительности, оно снабжено дополнительной системой управления исполнительный механизмом, конструктивное выполненне которой аналогично основной, при этом вход дополнительной системы соединен с фотодатчиками, а выходы каждой системы управления посредством дизъюнктора связаны со входами коммутатора. Источники информации, принятые во внимание при экспертизе: 1.Патент СССР № 210777, кл. А 22 С 25/14, 1965, 2.Авторское свидетельство СССР по заявке №2054489/13,кл.А 22 С 25/14, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки рабочих органов однооперационной рыборазделочной машины | 1974 |
|
SU538702A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1978 |
|
SU736932A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для управления рабо-чиМи ОРгАНАМи РыбООбРАбАТыВАющЕйМАшиНы | 1979 |
|
SU835401A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU721060A2 |