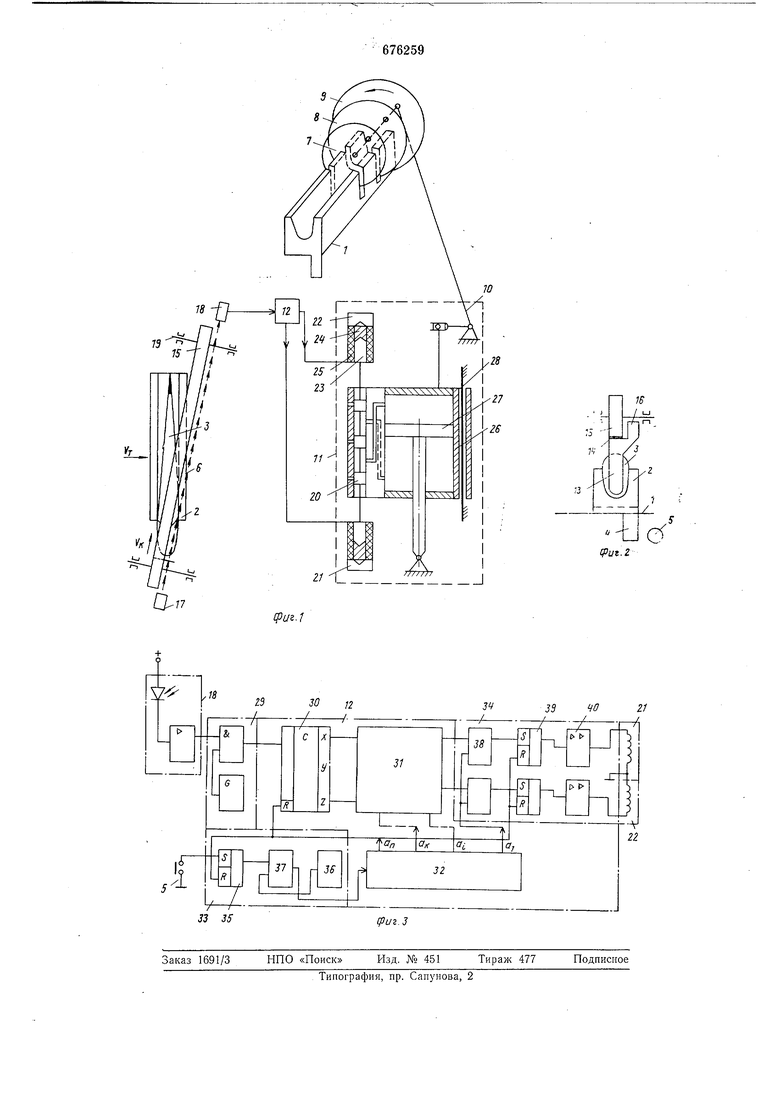
Определяется количеством технологических узлов, которые располагаются на этом участке, например по ходу движения транспортера 1 могут быть установлены узлы обезглавливания рыбы, удаление ее внутренностей и т. д. Электрогидравлический привод 11 подключен к выходу системы 12 управления исполнительным механизмом, вход которой подключен к выходу датчика 6 линейного размера рыбы.
Датчик 6 линейного размера содержит чувствительный элемент, выполненный в виде шторки 13, ось качания 14 которой установлена на дополнительном конвейере 15, располол енным иод углом к транспортеру 1. В верхней части шторки установлен флажок 16, перекрываюш,ий в свободном состоянии луч света, идуш,ий от источника 17 к фотоприемнику 18.
Скорости транспортера 1 (Ут) и дополнительного конвейера 15 (Ук) синхронизированы путем связи с иомош,ью редуктора (на чертеже условного не показан) оси 19 враш,ения с осью вращения транспортера 1.
Электрогидравлический привод И включает в себя золотниковый распределитель 20, который посредством тяг управляется от двух соленоидов 21 и 22, каждый из которых содержит втягивающий сердечник 23, возвратную 24, катушку 25 соленоида, и цилиндр 26 с неподвижно закрепленным порщнем 27. Цилиндр 26 расположен в направляющих 28 с возможностью возвратно-поступательного перемещения вдоль поршня.
Автоматическая система 12 (см. фиг. 3) управления исполнительным механизмом (соленоидами 21 и 22) содержит преобразователь 29, наиример преобразователь временного интервала в число импульсов, шифратор 30, блок памяти 31, распределитель 32 с тактирующим датчиком 33 и усилительный блок 34. В тактирующий датчик 33 входит R-S-триггер 35, S-вход которого подключен к путевому выключателю 5, генератор 36 импульсов и конъюнктор 37. Усилительный блок 34 содержит два конъюнктора 38, два R-S-триггера 39 и два усилителя 40 мощности, выходы которых подключены каждый к соленоидам 21 и 22.
Работа устройства происходит следующим образом.
Работа устройства начинается с процесса измерения длины рыбы 3, лежащей в кассете 2, датчиком 6. Если в кассете рыба отсутствует, то измерительная шторка 13 датчика 6, установленная на конвейере 15 и движущаяся синхронно с транспортером но стрелке VK, свободно проходит внутри кассеты 2. При этом флажок 16 шунтирует луч света от источника 17 к фотоприемнику 18 и на его выходе будет нулевой сигнал.
При наличии рыбы в кассете 2 измерительная штОрка 13 натыкается на нее и отклоняется, пропуская луч света от источника 17 к фотоприемнику 18, и последний выдает сигнал, длительность которого равна времени отклоненного состояния шторки или при постоянной скорости УК движения конвейера 15 пропорциональна длине измеряемой рыбы.
Преобразователь 29, состоящий из генератора и конъюнктора, производит преобразование временного интервала в пропорциональное число импульсов. Шифратором 30 пачка импульсов с преобразователя 29 преобразуется в код У: Z, причем, если измеренная рыба относится к мелкой размерной фракции, то код принимает значения , , .
Если рыба относится к средней размерной фракции, то 0, , , и, наконец, для крупной размерной фракции код равен 0, ,.
Информация о принадлежности рыбы к той или иной размерной фракции поступает в блок памяти 31, который управляется распределителем 32. Работа распределителя начинается в тот момент, когда флажок 4 начинает взаимодействовать с путевым выключателем 5. В результате в тактирующем датчике 33 происходит срабатывание триггера 35, и сигнал с генератора 36 через конъюнктор 37 поступает на распределитель 32. Под действием сигналов Oj-а с распределителя 32 информация о размерной фракции рыбы записывается в блок памяти. Сигнал йп останавливает работу тактирующего датчика 33.
С каждым новым подходом флажков 4 к путевом:у выключателю 5 происходит запуск датчика 33 и распределителя 32. В результате происходит запись информации о каждой измеренной рыбе и ее движение по ячейкам блока памяти с движением транспортера.
При подходе рыбы к дисковым ножам 7, 8 и 9 код, характеризующий размер рыбы, считывается с блока памяти и поступает в усилительный блок. Если рыба относится к средней размерной фракции, то считываемый нулевой код с блока памяти 31 не вызывает появления токов в катушках 25 соленоидов 21 и 22. В результате золотниковый распределитель 20 электрогидропривода 11 и ножи 7, 8 и 9 сохраняют свое начальное полол ение. Тело рыбы проходит под ножом 7, а отрезание хвостового плавника производится ножом 8.
Если к ножам 7, 8 и 9 подходит рыба мелкой размерной фракции, то с блока памяти 31 на усилительный блок 34 поступает сигнал . Этот сигнал запоминается с помощью триггера 39 и усиливается усилителем 40. В катушке 25 соленоида 21 появляется ток, сердечник 23 втягивается, и золотниковый распределитель 20 перемещается вниз.
Аналогичным образом перемещается цилиндр 26 относительно поршня 27 и направляющей 28, штанга 10 поворачивается и ножи 7, 8 и 9 опускаются. В этом случае в операции отрезания хвостового плавника мелкой рыбы участвует нож 7.
После выполнения операций сигналом ип, поступающим на триггер 35, соленоид 21 обесточивается и под действием возвратной пружины 24 сердечник 23 с золотниковым распределителем 20 возвращается в исходное нулевое состояние, что вызывает в конечном итоге возвращение ножей 7, 8 9 также в исходное состояние.
Процессы, обратные описанным, происходят в устройстве, когда на усилительный блок поступает код Х() , Z 1 (крупная размерная фракция). В этом случае под током находится катушка соленоида 22. Золотниковый распределитель 20 перемещается вверх, вызывая аналогичные перемещения цилиндра 26, штанга 10 поворачивается в обратную сторону, и ножи 7, 8 и 9 поднимаются, ножи 7 и 8 проходят над рыбой, а нож 9 отрезает хвостовой плавник.
В данном устройстве не требуется перемещение рыбы вдоль кассеты. Для того чтобы отрезать хвостовой ллавник рыб различных размеров, необходимо либо поднимать (для крупных рыб), либо опускать (для мелких рыб) дисковые ножп.
Время, затрачиваемое на перемещение ножей, значительно меньше времени, которое затрачивается на перемещение рыбы вдоль кассеты.
Таким образом, предлагаемое устройство для отрезания хвостового плавника рыб, позволяет значительно сократить время на выполнение указанной технологической операции и, тем самым, повысить производительность труда.
Формула изобретения
Устройство для отрезания хвостового плавника рыб, содержащее транспортер с
кассетами, датчик линейного размера рыб, укрепленный на валу дисковый нол и систему управления исполнительным механизмом дискового ножа, отличающееся тем, что, с целью повышения производительности, оно снабжено дополнительными дисковыми ножами, последовательно укрепленными на валу и имеющими увеличивающийся диаметр, при этом ножи установлены с возможностью колебательного перемещения посредством прикрепленной к валу штанги, связанной посредством щарнирного соединения с системой управления исполнительным механизмом.
Источники информации,
принятые во внимание при экспертизе
1. Пазенко В. Т. Механизмь автоматической настройки рабочих органов рыборазделочных машин. М., 1966, с. 52-56.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для удаления внутренностей рыбы | 1976 |
|
SU731944A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Устройство для сортировки рыбы | 1975 |
|
SU573145A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| ЛИНИЯ ДЛЯ ХОЛОДИЛЬНОЙ ОБРАБОТКИ РЫБЫ ДИОКСИДОМ УГЛЕРОДА | 2011 |
|
RU2479803C1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для нанизывания рыбы на прутки | 1983 |
|
SU1103839A1 |
| Устройство для разделки рыбы | 1990 |
|
SU1753932A3 |
| Устройство для отрезания хвостового плавника у рыб | 1984 |
|
SU1204166A1 |
| Устройство для разделки рыбы | 1990 |
|
SU1750584A1 |