1
Изобретение относится к рыбной промышленности, а именно к устройствам для сортировки рыбы.
Известны устройства для сортировки рыбы, содержащие датчик линейного размера рыбы, транспортирующий конвейер и исполнительный механизм 1 ..
Недостатком известного устройства являются большие затраты времени пр переходе на сортировку с одной породы рыбы на другую и невозможность сортировки разделанных на различные виды рыбы.
Цель изобретения - сортировка рыб различных пород на in размерных групп.
Это достигается тем, что в устройстве для сортировки рыбы, содержащем датчик линейного размера рыбы, транспортирующий конвейер и исполнительный механизм, имеется тактирующий датчик, система управления исполнительным механизмом, две группы блоков памяти, одна из которых включает шифратор, и распределитель импульсов, при этом вход последнего связан с тактирующим датчиком, а выход - с блоками памяти, одна из групп блока памяти соединена с помощью дешифратора с системой управления исполнительным механизмом, а группа блока памяти с шифратором через блок задержки и преобразователь временного интервала в число импульсов - с датчиком линейного размера рыбы.
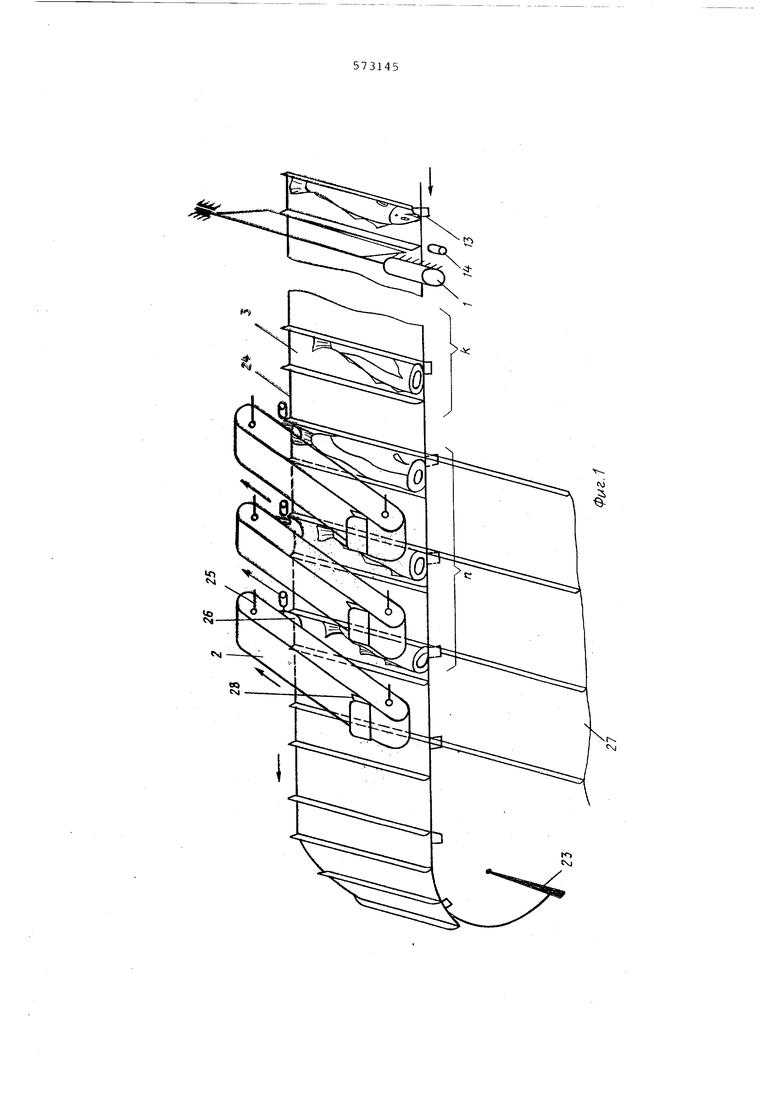
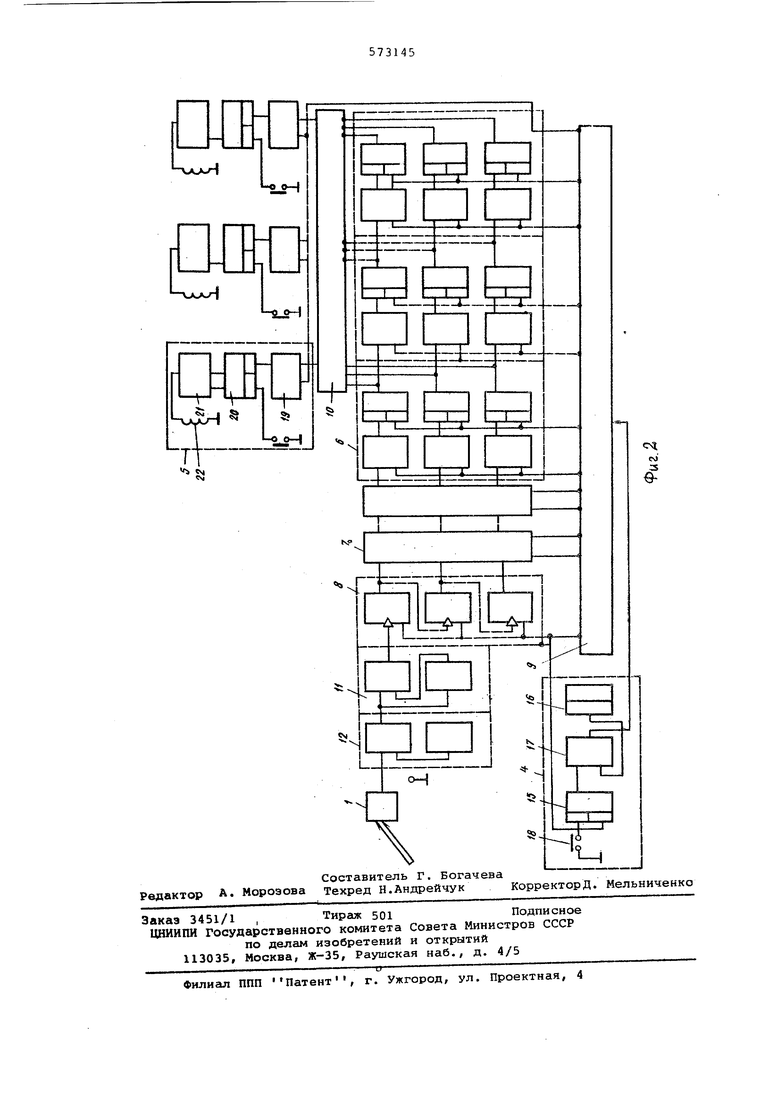
На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 принципиальная блок- :хема устройства. Устройство для сортировки рыбы
состоит из датчика 1 линейного размера рыбы, установленного над транспортирующими конвейерами 2 за зоной запасовки рыбы в лотки 3, тактирующего датчика 4, системы 5 управления
исполнительным механизмом, двух групп блоков 6 и 7 памяти, одна из которых имеет шифратор 8 и распределитель 9 импульсов, при этом вход последнего связан с тактирующим датчиком 4, а
вьлход - с блоками памяти, одна из групп блока памяти соединена с помощью дешифратора 10 с системой 5 управления исполнительным механизмом, а группа блока памяти с ишфратором 8 череэ
блок 11 задержки и преобразователь 12 временного интервала в число;импульсов с датчиком 1 линейного размера рыбы.
Устройство для сортировки рыбы работает следующим образом.
При подходе лотка 3 с первой рыбой, поступающей на сортировку, к датчику 1 линейного размера рыбы, например максимальной толщины, сигнал поступает в преобразователь 12 . временного -интервала в число импулсОв, состоящий из генератора и конъюнктора. Блок 11 задержки обеспечивает на своем выходе получение сигнала в виде пачки импульсов, пропорциональных относительной толщине измеряемых рыб, которые поступают на шифратор 8, служащий для преобразования пачки импульсов в двоичный код, при этом количество разрядов двоичного счетчика выбирается , исходя из числа размерных групп. Флажок 13 и конечный выключатель 14 расположены относительно друг друга гак, чт.о конечный выключатель 14 срабатывает только после завершения процессов измерения и преобразования датчиком 1 линейного размера рыбы, преобразойателём 12 и шифратором 8 самого большого из экземпляро сортируемых-рыб. ,
После измерения-рыбы срабатывает конечный выключатель,14, подключен ый ко входу триггера 15. На выходе риггера 15 появляется единичный сигнал и сигналы генератора 16 импульсов через конъюнктор 17 поступает на вход распределителя 9 импульсов, который имеет 2(n + k) +21 выходов , Причем первый ВЕЛХОД распределителя 9 QI управляет работой П систем 5 управления исполнительными механизмами транспортирующих конвейеров 2, выходы со второго .«2 до предпоследнего ) +1 управляют работой() -блоков 6 и 7 памяти, .сбрасывая информацию с них по четным сигналам а... , ...Os{n + k) и записывая информацию по нечетным сигналам о-},- «„.., ... а г ( . а входной сигнал о-г ( +2 упраляет работой шифратора 8, работой тактирующегр датчика 4 и прекращает подачу импульсов с генератора 16 на распределитель 9.
Поскольку проводили измерение только первой рыбы, все блоки памяти находились в нулевом состоянии и сигналы распределителя 9 не вызывали поступления информации к.системам 5 управЛени.Я .
Сигналом Qg (и + k) +1 с распределителя 9 происходит запись информации об относительном линейном раз-мере первой рыбы в.первый блок 7 Памяти, а сигналом ciaf + i) +2 - сброс информации с шифратора В и остановка тактирующего датчика 4 путем возвращения триггера 15 в нулевое состояние.
При измерении второго экземпляра рыбы происходят аналогичные процессы, но информация о первом «кземпляре рыбы поступает на вторую ячейку блока 7 памяти, а в первую ячейку записывается информация о втором экземпляре .
В результате измерения К +1 числа рыб информацией заполняется +1 ячейка памяти блоков 7 и 6 и в работу вступает дешифратор 10.
После окончания процесса измерения К числа рыб и срабатывания конечного выключателя 18 сигналом а,- с распределителя 9 может включиться в работу первая система 5 управления первым конвейером 2, если первая рыба относится к первой размерной группе. При этом на первом выходе; дешифратора 10, а, следовательно, и на одном из входов конъюнктора 19 появится единичный сигнал. Сигнал а с распределителя 9 и сигнал с дешифратора 10 через конъюнктор 19 вызывают срабатывание триггера 2.0, выходной сигнал которого через усилитель 21 мощности включает электромагнитную муфту 22. Происходит оцеплймие оси 23 вращения конвейера 24 с осью 25 вращения первого транспортирующего конвейера 2, который расположен под yrj7OM ci. к конвейеру 24, равным
оС агссоз : Ртх
где ЕЛ рассгоянпе лотками конвейера 24,
РТК - расстоянпе лелсду толкателями 26 по периметру конвайер а 2
С помощью нижнего толкателя 26 рыба сбрасывается в первую направляющую 27, флажок 28 верхнего толкателя 26 взаимодействует с конечHHjvi выключателем 18, который, импульснО за1--;ь: каясь f ЕОйвращает триггер 20 в нулевое состйяние, обесточивает электромагнитную муфту 22 и останавливает- коквейер 2.
Если первая рнба прнна.длежит к размерной группе, то nd мере иймерения рыб происходи - передача и.нформацйи, к блоку 6 памяти, а затем в работу вступает |Й-ная система 5 управления .п-ны..1 конвейером 2, который сбрасывает рыбу в Vl-Hyso направляющую 27,
Формула изобретения
Устройство для сортировки рыбы, содержащее датчик линейного размера
рыбы, транспортирующий конвейер и
исполнительный механизм, отличающееся тем, что, с целью сортнровки рыб различных пород на п размернык групп, оно снабжено тактирующам датчико 4у системой упргвления исполнительным механизмом, двумя группами блоков памяти, одна из которых имеет шифратор, и распределителе импульсов, при этом вход последнего связан с тактирующим датчиком, а выход - с блоками памяти, одна из групп блока памяти соединена с помощью дешифратора с системой управления исполнительным
механизмом, а группа блока памяти с шифратором через блок задержки и преобразователь временного интервала iB число импульсов - с датчиком линейного размера рыбы.
Источники информации, принятые во внимание при экспертизе:
1 , Авторское свидетельство 497993, кл. А 22 С 25/14, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отрезания хвостового плавника рыб | 1977 |
|
SU676259A1 |
| Устройство для сортировки рыбы | 1976 |
|
SU654233A1 |
| Устройство для удаления внутренностей рыбы | 1976 |
|
SU731944A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| Устройство для автоматического управления процессом настройки рабочих органов рыборазделочной машины | 1976 |
|
SU738576A1 |