1
Изобретение относится к области машиностроения и может быть использовано в подъемно-транспортных средствах, в частности в шахтных подъемных машинах.
Известен гидравлический многоэлементный дисковый тормоз, например, для шахтных подъемных машин, содержаший тормозные элементы с пружинным замыканием колодок, электрическую систему управления и гидравлическую, включающую рабочие цилиндры тормозных элементов, а также сливной и нагнетательный трубопроводы. Полости рабочих цилиндров параллельно подключены к магистрали высокого давления рабочей жидкости.
Изменение тормозного усилия в процессе торможения происходит в результате регулирования объема и давления рабочей жидкости в напорном трубопроводе, причем рабочее и автоматически регулируемое предохранительное торможение осуш,ествля отся аналоговым способом при помощи нескольких двухкаскадных электрически управляемых регулировочных устройств с их дублированием на случай отказа обычными двухпозиционными двухкаскадными электрогидравлическими клапанами.
У такого тормоза имеются следуюш,ие недостатки: разнотипность электрогидравлических управляющих устройств, недостаточная надежность системы управления, при которой работа многих исполнительных тормозных элементов зависит от надел ности работы одного-двух управляющих устройств (клапанов); малое быстродействие и чувствительность тормоза из-за больших объемов регулирования рабочей жидкости и значительных гидравлических сопротивлений; возникновение волновых процессов
0 в последней в связи с большой протяженностью трубопроводов, применение двухкаскадных электрогидравлических устройств большой мощности. Целью изобретения является повышение
5 надежности, быстродействия и безопасности работы.
Для этого в предлагаемом гидравлическом многоэлементном дисковом тормозе электрическая система управления выполнена в виде индивидуальных для каждого тормозного элемента однокаскадных электромагнитных управляющих устройств, а также формирователя импульсных сигналов управления для создания рабочего торможения и блока программного дискретного управления для создания предохранительного торможения, причем к формирователю и блоку обмотки электромагнитов управляющих устройств присоединены через
0 переключатель режима работы.
Кроме того, каждое индивидуальное однокаскадное электромагнитное управляющее устройство вынолнено в виде сдвоенного, поднружиненного гидравлически разгруженного электромагнитного клапана, соединяющего при его крайних полол еннях нолость рабочего цилиндра тормозного элемента со сливным и нагнетательным трубопроводами.
Индивидуальное однокаскадное электромагнитное управляющее устройство может быть выполнено встроенным в корпус тормозного элемента.
Установка одинаковых однокаскадных управляющих клапанов иепосредственно в каждый тормозной элемент обеспечивает однотипность управляющих устройств как для рабочего, так и предохранительного торможения, создает предпосылки для широкой унификации и стандартизации исполнительных элементов тормоза и органов управления ими, уменьшения гидравлических сопротивлений. Малые объемы регулирования рабочей жидкости, обусловленные лишь объемами цилиндров в каждом тормозном элементе и позволившие отказаться от двухкаскадных сложных управляющих устройств, повышают быстродействие тормоза. Применение индивидуальных управляющих устройств новышает надежность тормоза, не требует применения дополнительных дублирующих устройств, так как в случае отказа одного из элементов оста(вщиеся в исправности смогут завершить процесс торможения с незначительной потерей величины развиваемого тормозом тормозного момента. Подключение обмоток электромагнитов управляющих клапанов к источникам имнульсных (при рабочем торможении) или чисто дискретных (при предохранительном торможении) сигналов управления повышает чувствительность и быстродействие тормоза, потому что импульсные и дискретные системы унравления обладают более высоким быстродействием по сравнению с аналоговыми.
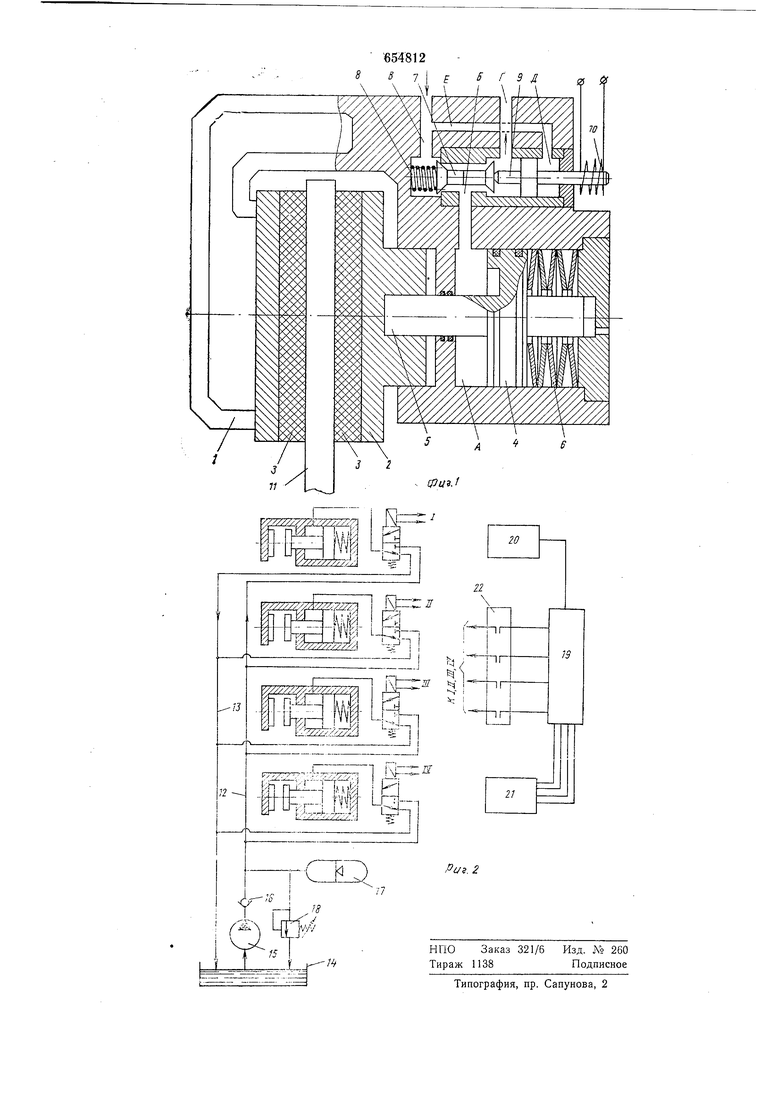
Па фиг. 1 изображен предлагаемый тормоз, разрез (вариант с охватывающей реактивной скобой); на фиг. 2 - принципиальная схема унравления тормозом.
Предлагаемый тормоз включает корпус 1, в данном случае выполненный за одно целое с реактивной скобой и рабочим цилиндром, подвижную тормозную колодку 2, тормозные колодки 3 (футеровка), рабочий цилиндр 4, шток 5 цилиндра, пакет замыкающих тарельчатых пружин 6, сдвоенный двухпозиционный клапан 7, возвратную пружину 8 клапана, шток клапана 9 с разгрузочным поршнем, управляющий электромагнит 10 клапана, тормозной диск И (показан условно). Полость А рабочего цилиндра сдвоенным клапаном через канал Б соединяется с напорным каналом В или сливным каналом Г. Для разгрузки якоря
электромагнита от давления жидкости в напорном канале В щток клапана со стороны электромагнита имеет разгрузочный норшень, помещенный в цилиндр Д, соединенный каналом Е с напорным каналом В. При обесточенном электромагните клапан 7 ноджат пружиной 8 и закрывает доступ рабочей жидкости в цилиндр элемента,соединяя вместе с тем его полость через канал Б со
сливным каналом Г. Сливные и напорные каналы тормозных элементов соответственно параллельно соединены с напорным 12 и сливным 13 трубопроводами системы (см. фиг. 2). Рабочая жидкость (масло) находится в баке 14 (см. фиг. 2), откуда подается насосом 15 через обратный клапан 16 в напорный трубопровод и гидроаккумулятор 17. Для обеспечения заданного постоянного максимального давления жидкости в
гидросистеме установлен предохранительный клапан 18. Обмотки управляющих электромагнитов I-IV через переключатель режимов работы 19 соединены с формирователем импульсных сигналов унравления 20
нри рабочем торможении или с блоком 21 дискретного унравления нри регулируемом предохранительном торможении. Выключатель 22 служит для обеспечения аварийного торможения.
Работает тормоз следующим образом.
Гидронасос 15 вместе с гидроаккумулятором 17 и предохранительным клананом 18 поддерживают постоянное требуемое давление рабочей жидкости в напорном трубопроводе. При обесточенных электромагнитах все цилиндры тормозных элементов через управляющие клапаны соединены со сливом, давления в цилиндрах нет, машина заторможена.
Рабочее торможение. Переключатель режимов работы 19 подключает параллельно обмотки электромагнитов I-IV к формирователю импульсных сигналов управления 20. Управляющий сигнал создается электрическим формирующим элементом, который осуществляет процесс преобразования аналогового сигнала управления Uy(t), однозначно пропорционального положению рукоятки рабочего торможения на пульте
машиниста, в импульсный сигнал Un(t). Последовательность импульсов напряжения с постоянной амплитудой поступает в обмотки электромагнитов 10. Модулируемый параметр этих импульсов, например длительность или частота следования, пронорционален абсолютной величине сигнала управления Uy(t). Под действием импульсов штоки клапанов 9 перемещают клапаны 7 из одного крайнего положения в другое. В
течение времени действия импульсов полости цилиндров рабочих элементов соединяются с напорной магистралью 12, а в паузах- со сливной полостью 13. Полости А рабочих цилиндров в данном случае становятся экстраполирующим звеном, т. е. в
них происходит восстановление аналогового сигнала управления Uy(t) по его дискретным значениям /д(0- Величина давления в цилиндрах элементов оказывается пропорциональной величине сигнала управления U-y(t). Под действием этого давления рабочие цилиндры 4, преодолевая реакцию замыкающих пружин 6, перемещаются, и машина растормаживается. Высокочастотные составляющие давления в цилиндрах А сглаживаются за счет упругой инерционной системы, состоящей из рабочих цилиндров 4, замыкающих пружин 6, футеровки тормозных колодок 3, системы трубопроводов и гидроаккумулятора 17 давления. Таким образом, рабочие цилиндры в течение действия сигнала управления Uy(t) будут занимать строго определенное положение в цилиндрах, и величина тормозного усилия, развиваемого элементами, будет однозначно пропорциональна абсолютной величине сигнала управления Uy(t).
Предохранительное торможение. При поступлении команды «а включение предохранительного торможения переключатель режимов работы 19 подключает обмотки электромагнитов I-IV на блок 21 дискретного управления регулируемым предохранительным торможением, при этом все обмотки электромагнитов находятся под напряжением, полости цилиндров соединены с напорной магистралью, машина расторможена. Торможение осуществляется отключением электромагнитов управляющих клапанов тормозных элементов в определенной последовательности и сочетании по командам блока дискретного управления, которые вырабатываются в соответствии с заданной программой торможения.
Аварийное торможение осуществляется одновременным обесточиванием всех обмоток управляющих электромагнитов аварийным выключателем 22, при этом полости цилиндров тормозных элементов отсекаются от напорной магистрали и соединяются со сливом, машина быстро затормаживается. Аварийный выключатель 22 может быть сблокирован с переключателем режимов работы 19.
Применение предлагаемого дискового тормоза в шахтных подъемных машинах
обеспечивает по сравнению с известными тормозами повышенную надежность н безопасность работы подъемной установки, быстродействие и чувствительность тормозного устройства, упрощение функциональной схемы управления, а также снижение себестоимости изготовления тормоза в связи с высоким уровнем з нификации исполнительных тормозных элементов со встроенными управляющими устройствами и упрощением конструкции (однокаскадные управляющие элементы вместо двухкаскадных).
Формула изобретения
1. Гидравлический многоэлементный дисковый тормоз, например, для шахтных подъемных машин, содержащий тормозные элементы с пружинным замыканием колодок, электрическую систему управления и
гидравлическую, включающую рабочие цилиндры тормозных элементов, а также сливной и нагнетательный трубопроводы, отличающийся тем, что, с целью повышения надежности, быстродействия и безопасности работы, электрическая система управления выполнена в виде индивидуальных для каждого тормозного элемента однокаскадных электромагнитных управляющих устройств, а также формирователя импульсных сигналов управления для создания рабочего торможения и блока программного дискретного управления для создания предохранительного торможения, причем к формирователю и блоку отмотки
электромагнитов управляющих устройств присоединены через переключатель режима работы.
2.Тормоз по п. 1, отличающийся тем, что каждое индивидуальное однокаскадное электромагнитное управляющее устройство выполнено в виде сдвоенного, подпружиненного гидравлически разгруженного электромагнитного клапана, соединяющего при его крайних положениях полость рабочего цилиндра тормозного элемента со сливным и нагревательным трубопроводами.
3.Тормоз по п. 1, отличающийся тем, что индивидуальное однокаскадное электромагнитное управляющее устройство выполнено встроенным в корпус тормозного элемента.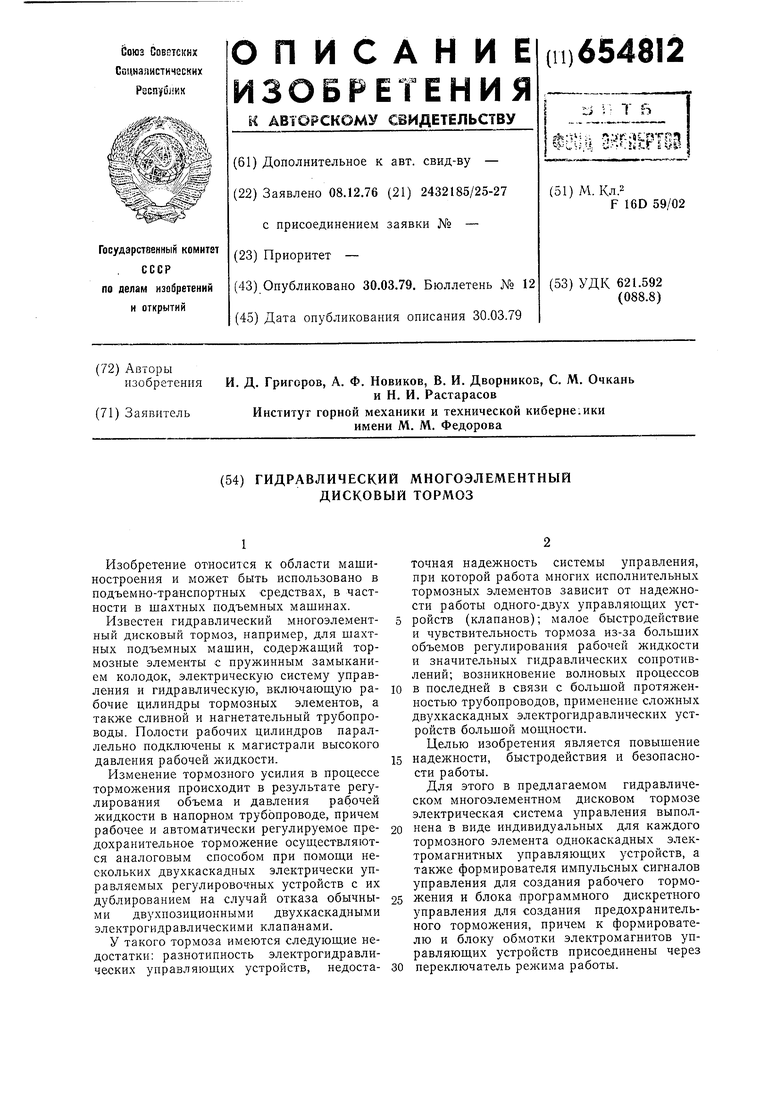
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления предохранительным тормозом подъемной машины | 1989 |
|
SU1636316A1 |
| Устройство для управления рабочим и предохранительным торможением подъемных машин | 1973 |
|
SU734081A1 |
| Электрогидравлический регулятор давления | 1975 |
|
SU575626A1 |
| Устройство для регулирования направления движения и остановки подъемной машины | 1983 |
|
SU1142429A1 |
| Гидравлический дисковый тормоз шахтной подъемной машины | 1979 |
|
SU787349A2 |
| Устройство для управления тормозом подъемной машины | 1985 |
|
SU1312044A1 |
| Устройство управления предохранительным тормозом подъемной машины | 1980 |
|
SU927705A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU929463A1 |
| ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1992 |
|
RU2062722C1 |
| Устройство управления предохранительнымТОРМОзОМ пОд'ЕМНОй МАшиНы | 1979 |
|
SU844534A1 |