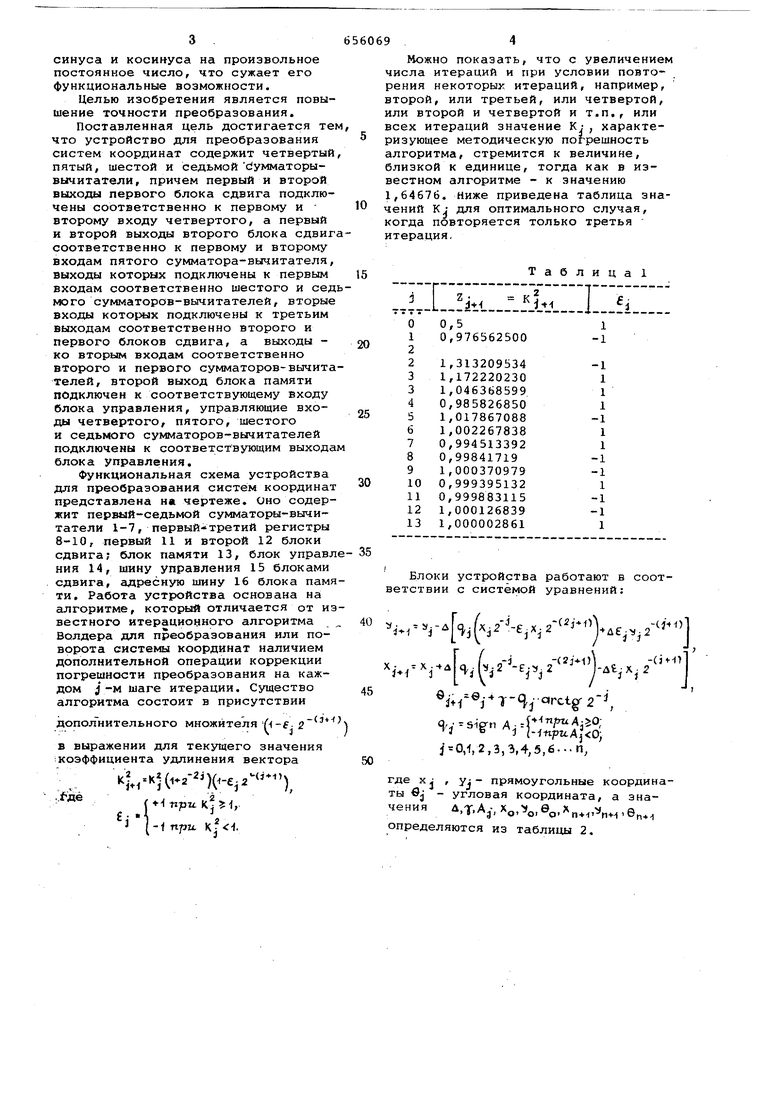
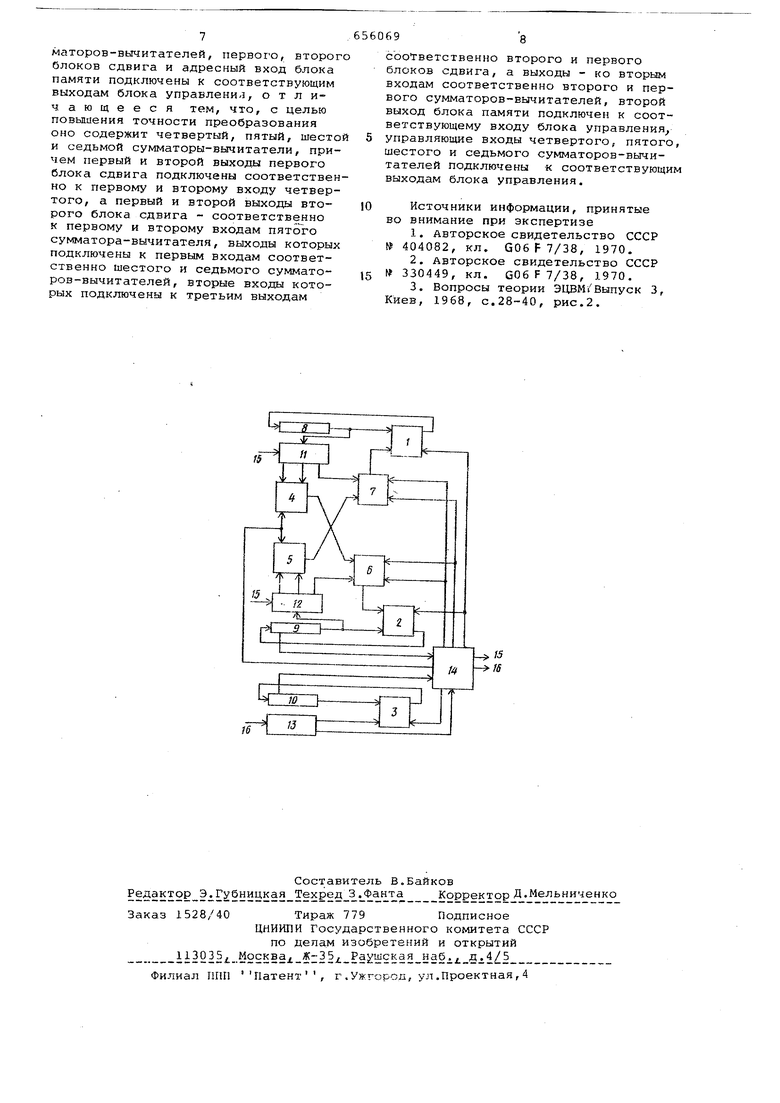
синуса и косинуса на произвольное постоянное число, что сужает его функциональные возможности. Целью изобретения является повышение точности преобразования. Поставленная цель достигается те что устройство для преобразования систем координат содержит четвертый пятый, шестой и седьмой сумматорывычитатели, причем первый и второй выходы первого блока сдвига подключены соответственно к первому и второму входу четвертого, а первый и второй выходы второго блока сдвиг соответственно к первому и второму входам пятого сумматора-вычитателя выходы которых подключены к первым входам соответственно шестого и сед мого сумматоров-вычитателей, вторые входы которых подключены к третьим выходам соответственно второго и первого блоков сдвига, а выходы ко вторым входам соответственно второго и первого сумматоров-вычита телей, второй выход блока памяти подключен к соответствующему входу блока управления, управляющие входы четвертого, пятого, шестого и седьмого сумматоров-вычитателей подключены к соответствующим выхода блока управления. Функциональная схема устройства для преобразования систем координат представлена на чертеже. Оно содержит первый-седьмой сумматоры-вычи татели 1-7, первый- третий регистры 8-10, первый 11 и второй 12 блоки сдвига; блок памяти 13, блок управл ния 14, шину управления 15 блоками сдвига, адресную шину 16 блока памя ти. Работа устройства основана на алгоритме, который отличается от и вестного итерационного алгоритма Волдера для преобразования или поворота системы координат наличием дополнительной операции коррекции погрешности преобразования на каждом J-м шаге итерации. Существо алгоритма состоит в присутствии дополнительного множителя A-f. 2 в выражении для текущего значения о знач« iкоэффициента удлинения вектора векторс .)), пр-и , -( пр-и, Можно показать, что с увеличением числа итераций и при условии повторения некоторык итераций, например, второй, или третьей, или четвертой, или второй и четвертой и т.п., или всех итераций значение К; , характеризующее методическую погрешность алгоритма, стремится к величине, близкой к единице, тогда как в известном алгоритме - к значению 1,64676. Ниже приведена таблица значений К: для оптимального случая, когда повторяется только третья итерация. Таблица - - - «. - -. - --. Блоки устройства работают в соответствии с системой уравнений: (.-,i2-).,e,,, n. .. „-( ,,-,,х. ®iM®rT- j-arctgr2- , S.,-sig-n A.rl ; Aj50; i (--fipuAJ oJ 0,1,2,3,3,4,5,6...n, где xj , уj- прямоугольные координаты e.j - угловая координата, a значения Д,Т.Аз,х.во.Х„,„,,в,., определяются из таблицы 2.
таблица2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления корня четвертой степени | 1975 |
|
SU561184A1 |
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| Вычислительное устройство | 1981 |
|
SU1136147A1 |
| Вычислительное устройство для поворота вектора | 1987 |
|
SU1520511A1 |
| Устройство для цифровой обработки сигналов | 1985 |
|
SU1336028A1 |
| Цифровой функциональный преобразователь | 1976 |
|
SU748434A1 |
| Вычислительное устройство | 1988 |
|
SU1508208A1 |
| Цифровой функциональный преобразователь | 1975 |
|
SU607223A1 |
| Арифметическое устройство | 1979 |
|
SU796844A1 |
| АРИФМЕТИЧЕСКОЕ УСТРОЙСТВО | 2004 |
|
RU2268482C1 |
Построение 1
n.
0«arctgf«/x
Поворот+1
xsxcosQ+r sine агусоэ e-xsifie
Поворот --1
x:xcoae-v3ltie VycosQ-i-xeine
«. -
Разложение X Rcose г Т sin в
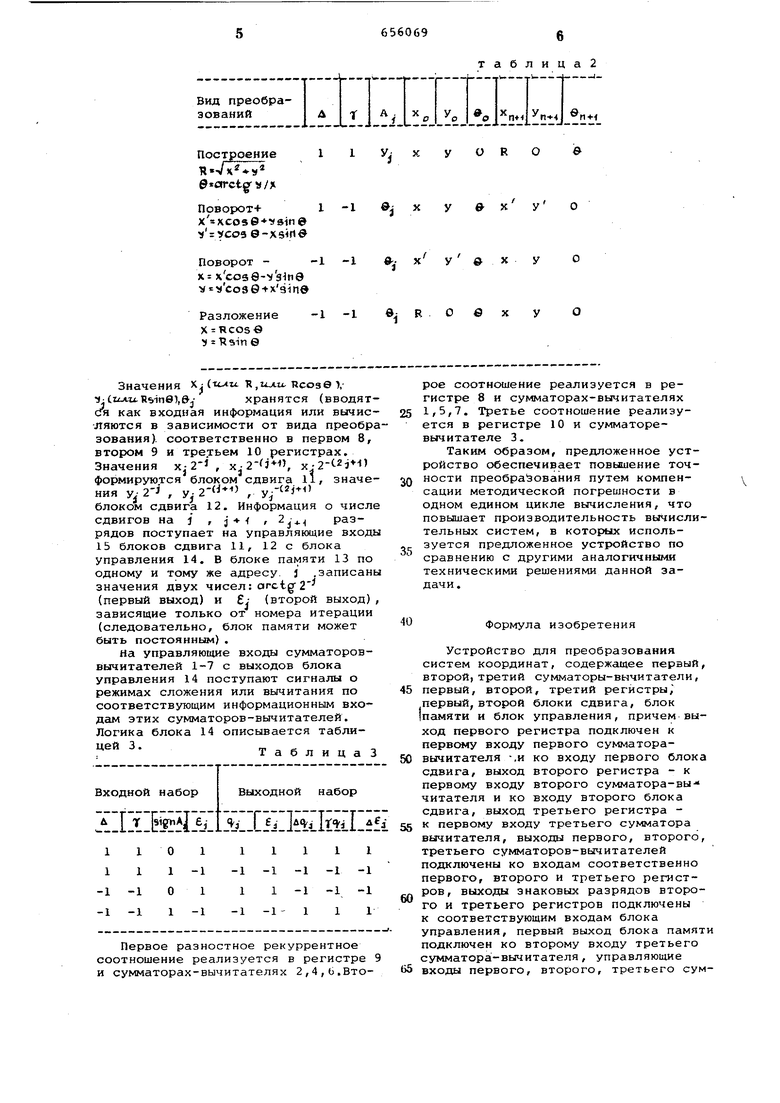
Значения Xj (tixix K.u u-ксозв V S:Cit -u.Rwne),&j- хранятся (вводятся как входная информация или вычисляются в зависимости от вида преобразования), соответственно в первом 8, втором 9 и третьем 10 регистрах. Значения х-2 , , ) формируются блоком сдвига ll, значения , , y, блоком сдвига 12. Информация о числе сдвигов на i , 3 , разрядов поступает на управляющие входы 15 блоков сдвига 11, 12 с блока управления 14. В блоке памяти 13 по одному и тому же адресу. J .записаны значения двух чисел: aretg2
{первый выход) и ; (второй выход), зависящие только от номера итерации
(следовательно, блок памяти может быть постоянным).
На управляющие входы сумматороввычитателей 1-7 с выходов блока управления 14 поступают сигналы о режимах сложения или вычитания по соответствующим информационным вхоД 1М этих сумматоров-вычитателей. Логика блока 14 описывается табли Т а б л и ц а 3
Первое разностное рекуррентное соотношение реализуется в регистре 9 и сумматорах-вычитателях 2,4,Ъ.Вто1 У X у О R О а
1 у ах у о
-1 е-- х у в X у о
1 в R о в X у О
рое соотношение реализуется в регистре 8 и сумматорах-вычитателях 1,5,7. Третье соотношение реализуется в регистре 10 и сумматоревычитателе 3.
Таким образом, предложенное устройство обеспечивает повьаиение точности преобразования путем компенсации методической погрешности в одном едином цикле вычисления, что повышает производительность вычислительных систем, в которых используется предложенное устройство по сравнению с другими аналогичными техническими решениями данной задачи.
40
Формула изобретения
Устройство для преобразования систем координат, содержащее первый, второй, третий сумматоры-вычитатели,
первый, второй, третий регистры, первый, второй блоки сдвига, блок памяти и блок управления, причем выход первого регистра подключен к первому входу первого сумматоравычитателя -.и ко входу первого блока сдвига, выход второго регистра - к первому входу второго сумматора-вы-« читателя и ко входу второго блока сдвига, выход третьего регистра к первому входу третьего сумматора вычитателя, выходы первого, второго, третьего сумматоров-вычитателей подключены ко входам соответственно первого, второго и третьего регистров, выходы знаковых разрядов второго и третьего регистров подключены к соответствующим входам блока управления, первый выход блока памяти подключен ко второму входу третьего умматора -вычитателя, управляющие
входы первого, второго, третьего сумматоров-в1ачитателей, первого, второго блоков сдвига и адресный вход блока памяти подключены к соответствующим выходам блока управленил, отличающееся тем, что, с целью повышения точности преобразования оно содержит четвертый, пятый, шестой и седьмой сумматоры-вычитатели, причем первый и второй выходы первого блока сдвига подключены соответственно к первому и второму входу четвертого, а первый и второй выходы второго блока сдвига - соответственно к первому и второму входам пятого сумматора-вычитателя, выходы которых подключены к первым входам соответственно шестого и седьмого сумматоров-вычитателей, вторые входы которых подключены к третьим выходам
16
соответственно второго и первого блоков сдвига, а выходы - ко вторым входам соответственно второго и первого сумматоров-вычитателей, второй выход блока памяти подключен к соответствующему входу блока управления управляющие входы четвертого, пятого шестого и седьмого сумматоров-вычитателей подключены к соответствующи выходам блока управления.
Источники информации, принятые во внимание при экспертизе
. 15 16
