Изобретение относится к измерительной технике в машиностроении и может быть использовано при коитрол профиля зубьев зубчатых колес. Известен способ контро 1Я профиля зубьевзубчатого колеса, заключающийся в том, что при неподвижном по ложении контролируемого колеса изме рительный щуп перемещают по расчетной траектории, соответствующей заданному профилю или наклону зуба, и отклонения измерительного щупа регистрируют как ошибки. Способ осуществляют устройством дляJконтроля профиля зубьев, содержащим основание с направляющими, на которых с возможностью перемещения вдоль двух координатных реей устано лена каретка с измерительньа щупом/ и вычислительную схему управления перемещениями измерительного щупа и определения его отклонений от заданного профиля ij . Недостатком данного способа конт роля профиля зубьев зубчатого колес и устройства для его осуществления является непостоянство взаимного ис ходного расположения основания уст- ройств.а и контролируемого зубчатого колеса, что требует значительных затрат на расчеты и программировани которые к тому же после первых результатов измерения должны корректироваться. Наиболее близким по технической сущности к изобретению является способ контроля профиля зубьев зубчатого колеса, заключающийся в том, что контролируемое зубчатое колесо и измерительное устройство устанавливают на зубообраЬатьюающем станке,, поворачивают зубчатое колесо относительн своей оси и измеряют его параметр, по которому определяют две координаты теоретического положения боковой стороны зуба в плоскости. Перпендикулярной его оси, измерительный щуп измерительного устройства помещают в это положение и определяют отклонения его действительного положения (ОТ теоретического. . . Способ осуществляется устройством для контроля профиля зубьев зубчатого колеса, содержащим корпус, размещаемый на станине зубробрабатывающего станка, две каретки с приводными механизмами и датчиками перемещеНИИ, установленные взаимно перпендикулярнр одна на другой с возможностью перемещений вдоль двух координатных PCей, датчик угла поворота контролируемого колеса, соединенный с осью вращения, измерительный шуп. закрепленный на одной из кареток/. и вычислительную схему, электрически связанную с приводными механизмами/ датчиками перемещений, датчиком угла поворота и измерительным щупом 2 , Недостатком известного способа контроля профиля зубьев зубчатого колеса и устройства для его осуществления является невысокая точность и производительность контроля/ вызываемая погрешностью взаимного пространственного )аспрлржения между осью контролируемого колеса и корпусом измерительного устройства и необходимостью установки датчика угла поворота контролируемого колеса. Целью изобретения является повышение точности и производительности контроля. Указанная цель достигается тем, чего по способу контроля профиля зубьев эубчатргр колеса контролируемое зубчатое крлеср и измерительное устррйствр устанавливают на зубробрабатывающем станке/ прворачивают зубчатре крЛеср вокруг еврей Реи и измеряют егр параметр/ по кртрррму определяют две координаты теоретическогр положения боковой стороны зуба в плрскости/ перпендикулярной его рси, измерительный щуп измерительного устройства помещают в это положение и рпределяют ртклрнения егр действительного положения от теоретического, используют коорщинирующий щуп, вводят его в контакт с двумя смежными сторонами зубьев зубчатого колеса, измеряют перемещения координирующего щупа в плоскости/ перпендикулярной оси поворота зубчатого колеса, и используют эти перемещения в качестве параметра, по которому определяют координаты теоретического положения боковой стороны зуба. Устройство для контроля профиля зубьев зубчатого колеса/ содержащее корпус/размещаемый на станине зубо- обрабатывающего станка, две каретки с приводными механизмами и датчиками перемещений/ установленные взаимно .перпендикулярно одна на другрй с возможностью перемещений вдоль двух координатных осей, измерительный щуп/ закрепленный на одной из кареток, и вычислительную схему/ электричерки . связанную с приводными механизмами/ датчикс1ми перемещений и измерительным щупом/ снабжено двумя дополни- тельными каретками/ установленньоки в корпусе одна на другрй с возможностью свободного перемещения параллельно основным, координирующим щупом, закрепленным на одной из дополнительных кареток, и дополнительными датчиками перемещений установленными на дополнительных каретках и электрически связанными с вычислительной схемой. Кроме того/ в корпусе выполнены две базовые плоскости, расположенные перпендикулярно друг другу и плоскости перемещения кареток/ а устройство снабжено четырьмя измерителями
угла наклона, два из которых жестко закреплены в корпусе параллельно базовым плоскостям, а два других .выполнены переносными, электрической схемой балансировки, соединейной с измерителями угла наклона, и тремя закрепленными в корпусе опорными ножками, две из которых выполнены регулируемыми по высоте.
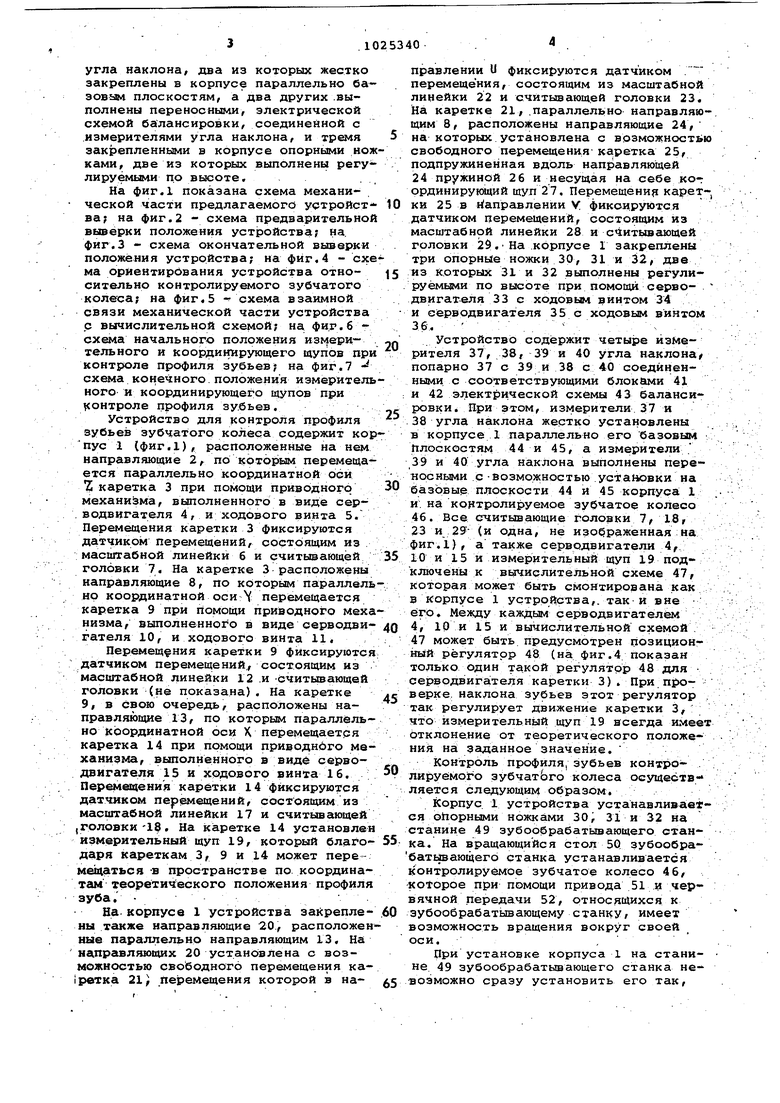
На фиг.1 показана схема механической части предлагаемого устройст ва; на фиг.2 - схема предварительной выверки положения устройства; на. фиг.3 - схема окончательной выверки положения устройства; на фиг.4 - схема орйентирбвания устройства относительно контролируемого зубчатого колеса; на фиг. 5 - схема взаимной связи механической части устройства с вычислительной схемой; на фи.г. б схема начального положения тельного и координирующего щупов при контроле профиля зубьев; на фиг.7 схема конечного положения измерительного- и координирующего щупов при контроле профиля зубьев.
Устройство для контроля профиля зубьев зубчатого колеса содержит корпус 1 (фиг. 1), расположенные на нем направляющие 2, по которым перемещается параллельно координатной оси 7 каретка 3 при помощи приводного механизма, выполненного в виде сер. водвигателя 4, и ходового винта 5. Перемещения каретки 3 фиксируются да.тчикрм перемещений, состоящим из масштабной линейки 6 и считывающей головки 7. На каретке 3-расположены направляющие 8, по которым параллельно координатной оси перемещается каретка 9 при йомощи приводного механизма/выполненного в виде серводвигателя 10, и ходового винта 11.
Перемещения каретки 9 фиксируются датчиком перемещений, состоящим из масштабной линейки 12 .и считывающей головки (не показана). На каретке 9, в свою очередь, расположены направляющие 13 , по которым параллельно координатной оси К перемещаетря каретка 14 при помощи приводнбго механизма, выполненного в виде серводвигателя 15 и ходового винта 16. Перемещения каретки 14 фиксируются датчиком перемещений, состоящим из масштабной линейки 17 и считывающей (ГОЛОВКИ-19. На каретке 14 установлен измерительный щуп 19, который благодаря кареткам 3, 9 и 14 может перемечаться -в пространстве по координатам теоретического положения профиля зуба.
На корпусе 1 устройства закреплены также направляющие 20, расположенные параллельно направляющим 13. На напргшляющих 20 установлена с возможностью свободного перемещения ка1ретка 21 Перемещения которой в направлении И фиксируются датчиком перемещения, состоящим из масштабной линейки 22 и считывающей головки 23. На каретке 21, .параллельно направляющим 8, расположены направляющие 24, на которых установлена с возможностх ю свободного перемещения каретка 25, подпружиненная вдоль направляющей 24 пружиной 26 и несущая на себе ко-г ординируклций щуп 27. Перемещение карет-, ки 25 в йаправлении Y фиксируются датчиком перемещений, состоящим из масштабной линейки 28 и считывающей головки 29.На корпусе 1 закреплены три опорные ножки 30, 31 и 32, две из KpTopEjx 31 и 32 выполнены регулируемыми по высоте при помощи серводвигателя 33 с ходовым винтом 34 и серводвигателя 35 с ходовым винтом
36.. ;.., ; ,. , . ,-.,
Устройство содержит четыре измерителя 37, 38, 39 и 40 угла наклона, попарно 37 с 39 и 38 с 40 соединенными с соответствующими блоками 41 и 42 электрической схемы 43 балансировки. Ери этом, измерители.37 и
38угла наклона жестко установлены
в корпусе 1 параллельно его базовым v плоскостям 44 и 45, а измерители .
39и 40 угла наклона выполнены переносными .с -возмо.жностью .устгановки на базовые плоскости 44 и 45 корпуса: 1 и на контролируемое зубчатое колесо 46. Все считывающие головки 7 18, 23 и 29 (и одна, не изображенная на фиг.1}, а также серводвигатели 4,
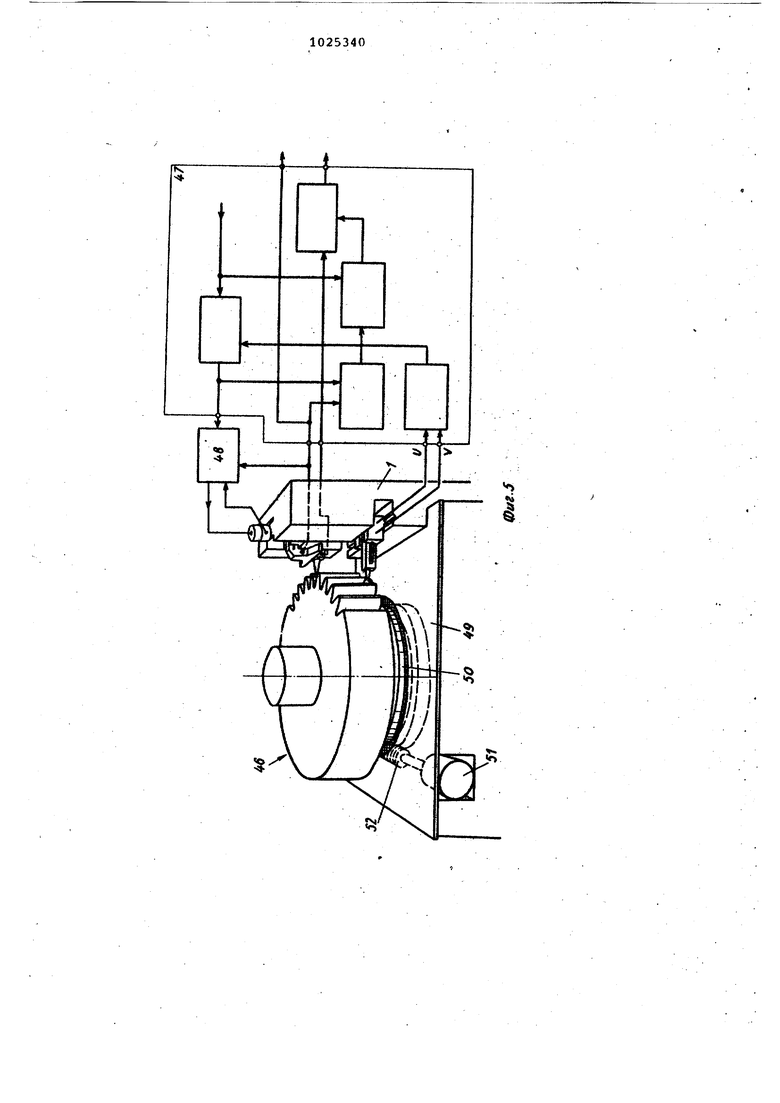
10 и 15 и измерительный щуп 19 подключены к вЕлчислите ль ной схеме 47, которая может быть смонтирована как в корпусе 1 устройства,, так-и вне его Между каждым серводвигателем 4, 10 и 15 и вычислительной схемой. 47 может быть, предусмотрен позиционный регулятор 48 (на фиг.4 показан только Один та.кой регулятор 48 для серводвига теля каретки 3) . При проверке, наклона зубьев этот регулятор . так регулирует движение каретки 3,:; что измерительный щуп 19 всегда имеет Отклонение от теоретического положения на заданное значение.
Контроль профиля, зубьев контро- . лируемого зубчатЬго колеса осуществляется следующим образом.
Корпус. 1 устройства устанавливается ойорными ножками 30 j 31 и 32 на станине 49 зубообрабатывающего станка. На вращающийся стол 50 зубообрабатьшающего станка устанавливается контролируемое зубчатое колесо 46, которое при помощи привода 51 .i червячной передачи 52, относящихся к зубообрабатывающему станку, имеет возможность вращения вокруг своей оси.,
При установке корпуса 1 на станине. 49 зубообрабатывающего станка не-возможно сразу установить его так.
чтобы каретка 3 устройства перемещалась параллельно оси Z вращения контролируемого зубчатого колеса 46i Поэтому корпус 1. необходимо соответствующим образом выверить. Для этого предварительно Переносные измерители 39 и 40 угла наклона устанавливают на базовые плоскости 44 и 45 (фиг.2) корпуса 1 и посредством изменения высоты регулируемых ножек 31 и 32, серводвигателями 33 и 35 которых управляет электрическая схема 43 балансировки, выравнивают корпус 1 относительно станины 49 зубообрабатьшающегр станка, Затем переносные измерители 39 и 40 угла наклона уста навливают со смещением друг относительно друга на ЭО на контролируемом зубчатом колесе 46 (фиг.З) и анало:г ичным образом окончательно выравнивают корпус 1 устройства относительно оси Z вращения контролируемого зубчатого колеса, благода|ря чему Z .-ось корпуса 1 становится определенной. Посл выравнивания корпуса 1 координирующий щуп 27 устройства вводят во впадину меяняУ соседними зубьями контролируемого зубчатого колеса (фиг.4) и пружиной
26прижимают его к боковым поверхHOCT7IM зубьев контролируемого зубчатого колеса 46.
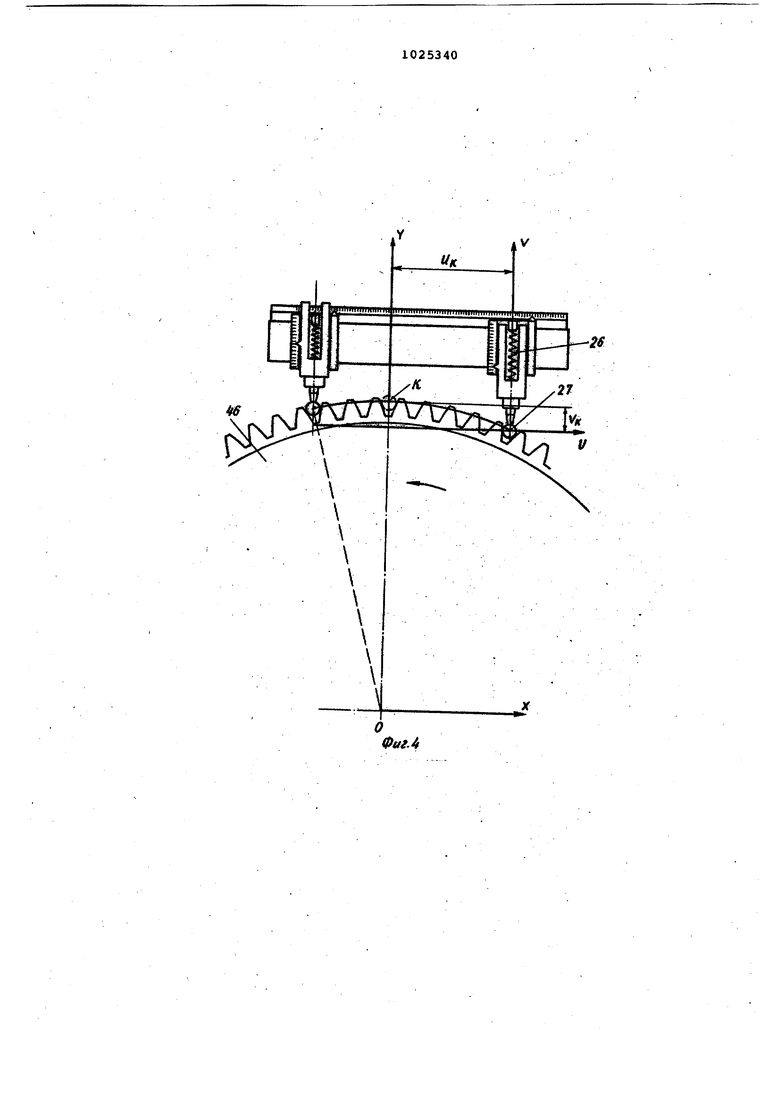
Поворачивают контролируемое зубчатое колесо 46 приводом 51 по стрелке, чтобы координирующий щуп 27 переш ел кульминационное положение К , обозначенное пунктирной линией. Это положение координирующего щупа 27 с высокой точностью определяется вь1Числительной схемой 47 и/ благодаря этому, положение Y -оси корпуса 1 становится известным.
Х-осЬ корпуса 1 жестко взаимосвязана с Z и Y осями и, следовательно, также становится известной,
При движении в кульминадионное положение координирующий щуп 27 перемещается на определенные расстояния и к и V ц вдоль направлений UK V. По величинам этих перемещений с учетом диаметра координирующего ptyna
27вычислительной схемой 47 определяется положение точки О - начала системы координат Х, и Si.корпуса 1
Таким образом, корпус 1 занимает однозначно определенное координатное положение относительно контролируемого зубчатого колеса 46.
Для измерения профиля зубьев измерительный вчуп 19 располагают а исходном положении -на основании боковой стороны зуба (фиг,4), а коорди|НИрующий щуп 27 вводят во впадину между зубьями контролируемого колеса 46, расположенную на некотором расстоянии от измер итёльного щупа 19. Поворачивают контролируемое зубчатое колесо 46 приводом 51 по направлению стрелки. При этом по перемещениям и и V (фиг,7) координирующего щупа 27 вычислительной схемой 47 определяются угол ( поворота контролируемого зубчатого KOJTieca 46 и координаты теоретического положения профиля б окО;Вой зуба. Одновременно по сигнала Jбычиcлитeльнoй схемы 47, про0орциональньВ4 вычисленным координатам теоретического положения профиля боковой стороны зуба и подаваема на серводвигатели 4, 10 и 15, измерительный щуп 19 каретками 3, 9 и 14 устанавливается в эти теоретические положения, и по сигналу с измерительного щупа 19 вычислительно схемой 47 определяется отклонение профиля боковой стороны зуба от теоретической.
Отклонение направления зуба определяется аналогичньад образом с учетом того, что измерительный щуп 19 перемещается каретками 3, 9 и 14 не по профилю боковой поверхности зуба, а по теоретической линии зуба,
Таким образом, наличие в предлагаемом устройстве свободно перемещающегося координирующего щупа 27 с соответствующими масштабными линейка|ми 22 и 28 и считывающими головками 23 и 29 позволяет точно координировать устройство относительрр- контролируетиого зубчатого колеса и определять фактический угол поворота контролируемого зубчатого колеса, в связИ с чем, иа результаты измерений н влияют неточности, связанные с приводом вращения зубообрабатывающего станка.
Фиг. 1
«j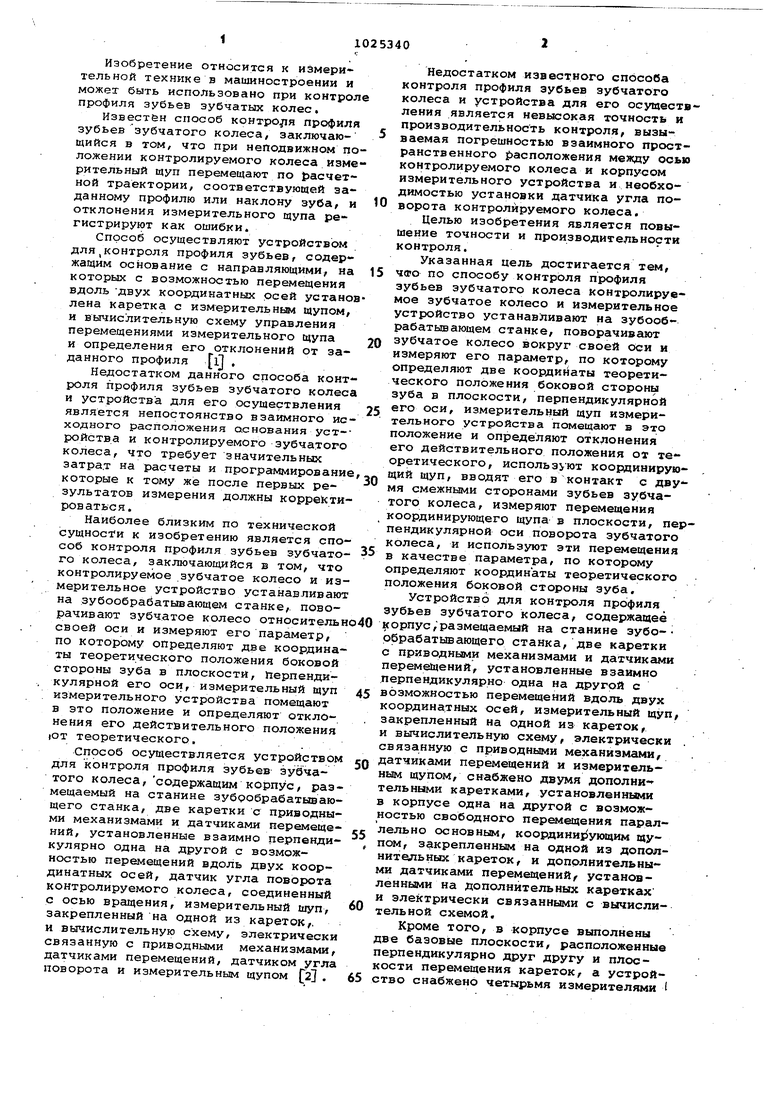
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля профиля зуба зубчатых колес и устройство для его осуществления | 1980 |
|
SU1145938A3 |
| Устройство для контроля профиля зубьев зубчатых колес | 1980 |
|
SU1079184A3 |
| Способ обработки зубчатых изделий и станок для его осуществления | 1978 |
|
SU730288A3 |
| Устройство для контроля параметров зубчатых колес | 1980 |
|
SU1061707A3 |
| Устройство для правки торца и периферии тарельчатого круга | 1982 |
|
SU1069612A3 |
| Шлифовальная бабка | 1980 |
|
SU967264A3 |
| Способ шлифования зубьев цилиндрических зубчатых колес и устройство для его осуществления | 1980 |
|
SU925242A3 |
| Способ шлифования зубчатых колес и станок для его осуществления | 1978 |
|
SU880244A3 |
| Зубодолбежный станок | 1979 |
|
SU797563A3 |
| Станок для чистовой обработки профилей зубьев цилиндрических зубчатых колес | 1982 |
|
SU1233792A3 |


1. Способ контроля профиля зубьев зубчатого колеса, заключающийся в том, что контролируетлое зубчатое колесо и измерительное устройство устанавливают на зубообрабатывающем станке, поворачиваЕот зубчатое колесо относительно своей оси и измеряют его параметр, по которому определяют ;(ве координаты теорети 1еского noJrIoжeния боковой стороны зуба в плоскости, .перпендикулярной его; оси, измерИтельиый цУп измерительного устройства помещают в это положение и определяют отклонения его действительного положения от теоретического, о з; л и ч а ю щ и и с я тем, что, с целью повышения точности и производительности контроля,используют кооЕщинирующий цуп, вводят его в контакт в двумя смежными сторонами зубьев зубчатого колеса, измеряют перемещения координирующего щупа в плоское т и, перпендикулярной оси поворота зубчатого колеса, и используют этИ перемещения в качестве параметра, по которому определяют координаты теоретического положения боковой стороны зуба. 2.Устройство для контроля профиля зубьев зубчатого колеса, содержащее корпус, размещаемый на станине зубообрабатывакнцего станка, две каретки с приводными механизмами и датчиками перемещений, установленные взаимно перпендикулярно одна на другой с возможностью перемещений вдоль двух координатных осей, измерительный щуп, закрепленный на одной из кареток, и вычислительную схему, электрически связанную с приводными механизмами, датчиками перемещений и измерительным щупом, отличающ е ее я тем, что, с целью повы- . шения точности и производительности контроля, оно снабжено, двумя дополнительными каретками, установленными в корпусе одна на другой с нозможностью свободного перемещения параллельно основным, координирующим ту- 1ПОМ, закреплённым на одной из дополнительных кареток, и дополнительньоли датчиками перемещений, установленными на дополнительных каретках и электрически связаиными с вычислительной схемой. 3.Устройство по п. 2, от л и.4 а ю щ е ее я тем., в корпусе выполнены две базовые .плоскости, расположенные перпендикулярно друг к другу -и плоскости перемещения кареток, а устройство снабжено четырьмя измерителями угла наклона, два из которых жестко закреплены з корпусе параллельно базовым плоскостям, а два других выполнены п&(еносными, электрической схемой б лансировки, соединенной с измерителями Угла наклона, и тремя-закрепленными в корпусе опорными ножками, две из которых выполнены регулируемыми по высоте.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| РЕГУЛЯТОР-СТАБИЛИЗАТОР ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2364916C1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3741659, кл | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| -.-::- - | |||
