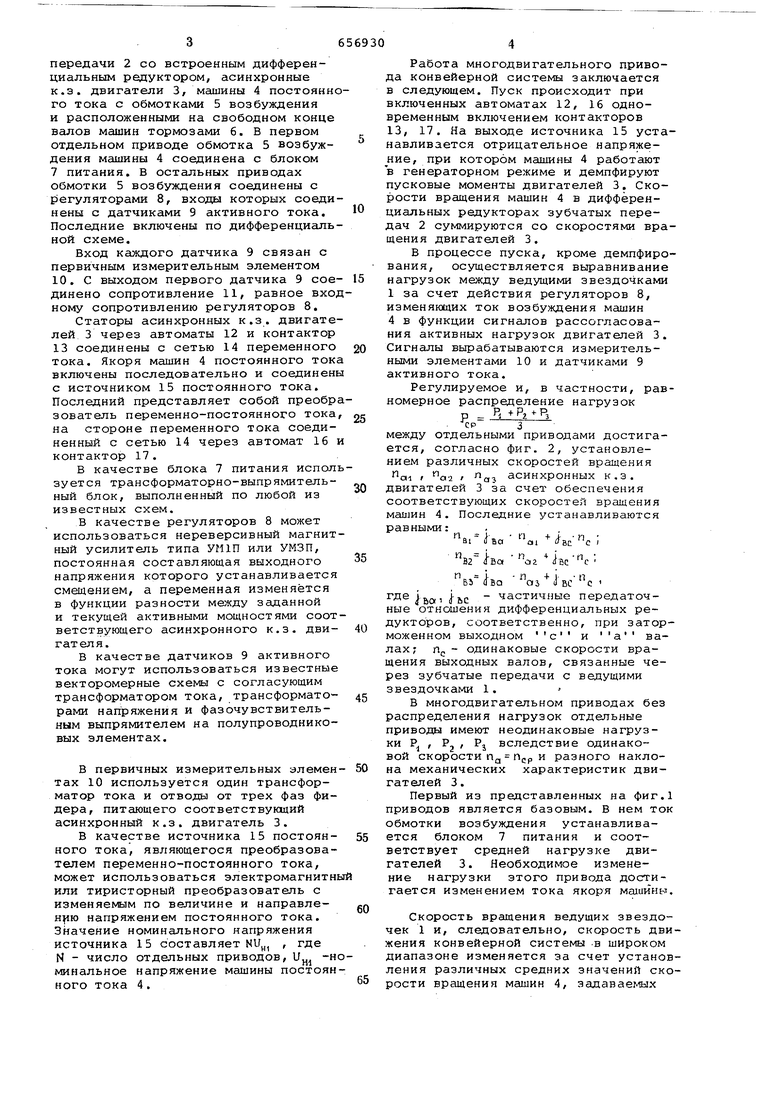
передачи 2 со встроенным дифференциальным редуктором, асинхронные к.з. двигатели 3, машины 4 постоянно го тока с обмотками 5 возбуждения и расположенными на свободном конце валов машин тормозами 6. В первом отдельном приводе обмотка 5 воз буждения машины 4 соединена с блоком 7 питания, В остальных приводах обмотки 5 возбуждения соединены с регуляторами 8, входы которых соеди нены с датчиками 9 активного тока. Последние включены по дифференциаль ной схеме. Вход каждого датчика 9 связан с первичным измерительным элементом 10. С выходом первого датчика 9 сое динено сопротивление 11, равное вхо ному сопротивлению регуляторов 8, Статоры асинхронных к.з. двигате лей 3 через автоматы 12 и контактор 13 соединены с сетью 14 переменного тока. Якоря машин 4 постоянного ток включены последовательно и соединен с источником 15 постоянного тока. Последний представляет собой преобр зователь переменно-постоянного тока на стороне переменного тока соединенный с сетью 14 через автомат 16 контактор 17. В качестве блока 7 питания испол зуется трансформаторно-выпрямительный блок, выполненный по любой из известных схем. В качестве регуляторов 8 может использоваться нереверсивный магнит ный усилитель типа УМ1П или УМЗП, постоянная составляющая выходного напряжения которого устанавливается смещением, а переменная изменяется в функции разности между заданной и текущей активными мощностями соот ветствующего асинхронного к.з. двигателя. В качестве датчиков 9 активного тока могут использоваться известные векторомерные схемы с согласующим трансформатором тока, трансформаторами напряжения и фазочувствительным выпрямителем на полупроводниковых элементах. В первичных измерительных элемен тах 10 используется один трансформатор тока и отводы от трех фаз фидера, питающего соответствующий асинхронный к.з. двигатель 3. В качестве источника 15 постоянного тока, являющегося преобразователем переменно-постоянного тока, может использоваться электромагнитн или тиристорный преобразователь с изменяелим по величине и направлен ю напряжением постоянного тока. Значение номинального напряжения источника 15 составляет NU, , где N - число отдельных приводов, Uj -н минальное напряжение машины постоян ного тока 4 . Работа многодвигательного привода конвейерной системы заключается в следующем. Пуск происходит при включенных автоматах 12, 16 одновременным включением контакторов 13, 17. На выходе источника 15 устанавливается отрицательное напряжение, при котором машины 4 работгшзт в генераторном режиме и демпфируют пусковые моменты двигателей 3. Скорости вращения машин 4 в дифференциальных редукторах зубчатых передач 2 суммируются со скоростями вращения двигателей 3. В процессе пуска, кроме демпфирования, осуществляется выравнивание нагрузок между ведущими звездочками 1 за счет действия регуляторов 8, изменяющих ток возбуждения машин 4 в функции сигналов рассогласования активных нагрузок двигателей 3. Сигналы вырабатываются измерительными элементами 10 и датчиками 9 активного тока. Регулируемое и, в частности, равномерное распределение нагрузок Р . 3 между отдельными приводами достигается, согласно фиг. 2, установлением различных скоростей вращения ai 02 / асинхронных к.з. двигателей 3 за счет обеспечения соответствующих скоростей вращения машин 4. Последние устанавливаются равными: ardBa ai ; , - аз авс- с где ,1 }},с - частичные передаточные отношения дифференциальных редукторов, соответственно, при заторможенном выходном с и а валах Лр- одинаковые скорости вращения выходных валов, связанные через зубчатые передачи с ведущими звездочками 1. В многодвигательном приводах без распределения нагрузок отдельные приводы имеют неодинаковые нагрузки PJ , Pj , Pj вследствие одинаковой скорости Пд П|,р и разного наклона механических характеристик двигателей 3. Первый из представленных на фиг.1 приводов является базовым. В нем ток обмотки возбуждения устанавливается блоком 7 питания и соответствует средней нагрузке двигателей 3. Необходимое изменение нагрузки этого привода достигается изменением тока якоря машинн. Скорость вращения ведущих звездочек 1 и, следовательно, скорость движения конвейерной системы .в широком диапазоне изменяется за счет установления различных средних значений скорости вращения машин 4, задаваемых напряжением постоянного тока источника 15. Как и в режиме пуска, в нормальных режимах выравнивание нагрузокосуществляется изменением тока в обмотках возбуждения 5 всех приводов, кроме базового. Защита многодвигательного привода осуществляется в две ступени. На пер вой ступени с помсяцью автомата 16 отключается регулирующая часть привода, а также затормаживаются якоря Иашин 4 с помсяцью тормозов 6; при этом конвейерная система продолжает функционировать за счет привода с асинхронными к.з. двигателями. На второй ступени, отрабатываемой в сл чае отключения любого из автоматов 12, происходит отключение контакторов 13, 17. Благодаря заданному распределению нагрузки между отдельнымиприво дами улучшаются условия их работы и увеличивается срок службы. Формула изобретения Многодвигательный привод конвейе ных систем, содержащий отдельные ба зовый и зависимые приводы с асинхронными короткозамкнутыми двигателями, дифференциальными редукторами и машинами постоянного тока, у которых обмотки постоянного тока соединены последовательно и подключены к общему источнику постоянного тока регулируемого напряжения, отличающийс я тем, что, с целью достижения заданного распределения нагрузки между отдельными приводами, он снабжен датчиком активного тока базового привода и регуляторами, к которым подключены обмотки возбуждения зависимых приводов, а входы регуляторов соединены с датчиком активного тока базового привода, выход которого подсоединен к регуляторам через добавочный резистор. Источники информации, принятые во внимание при экспертизе 1,БОРИСОВ Ю.М., Соколов М.М. Электрооборудование подъемно-транспортных машин. М., Машиностроение, 1971, с.335. 2.Погарский Н.А. Электрические трансмиссии машин с мотор-колесами.- М., Машиностроение, 1965, с 112:

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1997 |
|
RU2136570C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| Электропривод конвейерных систем | 1974 |
|
SU591364A1 |
| ЭЛЕКТРОМАШИННЫЙ АГРЕГАТ ДЛЯ ПОЛУЧЕНИЯ ПОСТОЯННОЙ ЧАСТОТЫ | 1973 |
|
SU372637A1 |
| Электропривод для шахтных самоходных машин | 1970 |
|
SU564982A1 |
| Судовая валогенераторная установка | 1972 |
|
SU471247A1 |
| Судовая валогенераторная установка | 1985 |
|
SU1284885A1 |
| Электромеханическая разветвленная система стабилизации частоты | 1974 |
|
SU532168A1 |
| Машинно-вентильный каскад | 1973 |
|
SU508874A2 |
| Стенд для обкатки и испытании двигателя внутреннего сгорания | 1976 |
|
SU629469A1 |
I/ /
„,-, ; 4 rt ,,.
DODaJU
У7яд
/7дз /7cp Яд
/7af
Рг POP
fw2.2
