Изобретение относится к электроприводам конвейерных систем.
Известны многодвигательные приводы постоянного тока, содержащие отдельные приводы с машинами смешанного возбуждения, у которых обмотки якорей соединены последовательно, а результирующая м.д.с. обмоток возбуждения реагирует не только на напряжение уставки, но и на ток якоря и разность частот вращения машин [1].
Наиболее близким по технической сущности и достигаемому техническому результату является многодвигательный привод конвейерных систем, содержащий отдельные базовый и зависимые приводы с асинхронными короткозамкнутыми двигателями, дифференциальными редукторами и двигателями постоянного тока, у которых обмотки постоянного тока соединены последовательно и подключены к общему источнику постоянного тока регулируемого напряжения. Он снабжен датчиком активного тока базового привода и регуляторами, к которым подключены обмотки возбуждения зависимых приводов, а входы регуляторов соединены с датчиком активного тока базового привода, выход которого подсоединен к регуляторам через добавочный резистор [2].
Недостатком прототипа является то, что асинхронные двигатели работают в течение всего времени эксплуатации в переходных режимах.
Задачей изобретения является создание привода, в котором автоматическое выравнивание нагрузки между двигателями осуществляется только в областях больших и малых нагрузок.
Поставленная задача решается тем, что многодвигательный привод конвейерных систем содержит отдельные базовый и зависимые приводы с асинхронными короткозамкнутыми двигателями, дифференциальными редукторами и двигателями постоянного тока, у которых обмотки постоянного тока соединены последовательно и подключены к общему источнику постоянного тока регулируемого напряжения, датчики активного тока базового и зависимых приводов и регуляторы, к которым подключены обмотки возбуждения зависимых приводов, причем одних входы датчиков активного тока зависимых приводов соединены с входом датчика активного тока базового привода, вторые входы всех датчиков активного тока соединены с первичными измерительными элементами, а к выходу датчика активного тока подключен добавочный резистор.
Новым по сравнению с прототипом является то, что привод снабжен нелинейными элементами по числу приводов с U-образной выходной характеристикой, причем выходы датчиков активного тока зависимых приводов подключены через соответствующие нелинейные блоки ко входам регуляторов, а выход датчика активного тока базового привода через последовательно соединенные добавочный резистор и соответствующий нелинейный элемент подключен ко входам всех регуляторов.
Новая совокупность существенных признаков необходима и достаточна для достижения указанного технического результата, так как система автоматического выравнивания нагрузок включается в работу в случаях больших перегрузок или недогрузок асинхронных двигателей, что исключает их постоянную работу в переходных режимах.
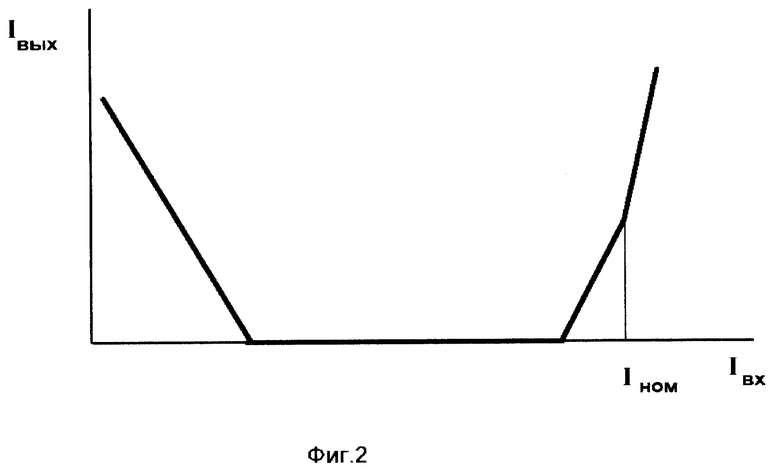
Сущность изобретения поясняется чертежом, на фиг.1 которого изображена схема многодвигательного привода, состоящего из трех отдельных приводов.
В состав многодвигательного привода конвейерной системы с ведущими звездочками 1 входят зубчатые дифференциальные редукторы 2, асинхронные короткозамкнутые двигатели 3, двигатели 4 постоянного тока с обмотками 5 возбуждения и тормозами 6. В первом отдельном приводе обмотка 5 возбуждения двигателя 4 постоянного тока соединена с блоком 7 питания, в остальных приводах обмотки 5 возбуждения соединены с регуляторами 8, входы которых подключены к выходам нелинейных блоков 9, входы которых связаны с датчиками 10 активного тока. С выходом первого датчика 10 активного тока соединено сопротивление 11. Другие входы датчиков 10 активного тока связаны с первичным измерительным элементом 12.
Якоря двигателей 4 постоянного тока включены по схеме общего тока и соединены с источником 13 постоянного тока. Статоры асинхронных двигателей 3 через автоматы 14 и контактор 15 соединены с сетью 16 переменного тока. Источник 13 постоянного тока соединен с сетью 16 через автомат 17 и контактор 18.
Устройство работает следующим образом.
Скорость конвейера регулируется путем изменения напряжения, подаваемого на обмотки 5 возбуждения двигателей 6 постоянного тока, что приводит к синхронному изменению скоростей ведущих звездочек 1 конвейера.
Выравнивание нагрузок происходит с помощью регуляторов 8, которые изменяют ток возбуждения двигателей 4 постоянного тока в функции сигналов рассогласования активного тока асинхронных двигателей 3.
Вид зависимости, которую реализует нелинейный блок 9, представлена на фиг. 2. В области, например, от 30 до 90% от номинального тока, зависимость Iвых=f(Iвх) проходит по горизонтальной оси; выходной сигнал нелинейного блока 9 в этой области равен нулю и система автоматического выравнивания нагрузок не работает. В этой области устанавливается произвольное соотношение нагрузок на асинхронные двигатели 3, что вполне допустимо, а переходные режимы исключаются. Вне этой области система автоматического выравнивания нагрузок вступает в действие. Чем больше степень отклонения нагрузки асинхронных двигателей 3 от номинала, тем круче наклон кривой, и, следовательно, интенсивнее действие регуляторов 8.
Многодвигательный привод может быть использован в конвейерах большой протяженности на предприятиях крупносерийного производства.
Источники информации.
1. Погорский Н.А. Электрические трансмиссии машин с мотор-колесами. -М.: Машиностроение, 1971, с. 335.
2. Авторское свидетельство N 656930, кл. В 65 G 23/00 15.04.79.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| Многодвигательный привод конвейерных систем | 1974 |
|
SU656930A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| КОМБИНИРОВАННАЯ ОПОРА | 1996 |
|
RU2138705C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СТЕНД ДЛЯ ОБКАТКИ И ИСПЫТАНИЙ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2133017C1 |
| ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2001 |
|
RU2210854C2 |
| Электропривод конвейерных систем | 1980 |
|
SU1137026A1 |
| СУДОВАЯ СИЛОВАЯ УСТАНОВКА | 2000 |
|
RU2178369C1 |
| Способ торможения асинхронного электродвигателя | 1983 |
|
SU1136286A1 |
Изобретение относится к конвейерному транспорту и может быть использовано в конвейерах большой протяженности. Задачей изобретения является автоматическое выравнивание нагрузки между двигателями только в областях больших и малых нагрузок. Для этого привод содержит отдельные базовый и зависимый приводы с асинхронными короткозамкнутыми двигателями, дифференциальными редукторами и двигателями постоянного тока. Обмотки постоянного тока двигателей соединены последовательно и подключены к общему источнику постоянного тока регулируемого напряжения. Привод имеет также датчики активного тока базового и зависимых приводов и регуляторы. К обмоткам возбуждения зависимых приводов подключены регуляторы. Одни входы датчиков активного тока зависимых приводов соединены с входом датчика активного тока базового привода. Вторые входы всех датчиков активного тока соединены с первичными измерительными элементами. К выходу датчика активного тока подключен добавочный резистор. Дополнительно привод снабжен нелинейными элементами по числу приводов с U-образной выходной характеристикой. Причем выходы датчиков активного тока зависимых приводов подключены через соответствующие нелинейные блоки к входам регуляторов. Выход датчика активного тока базового привода через последовательно соединенные добавочные резистор и соответствующий нелинейный элемент подключен ко входам всех регуляторов. 2 ил.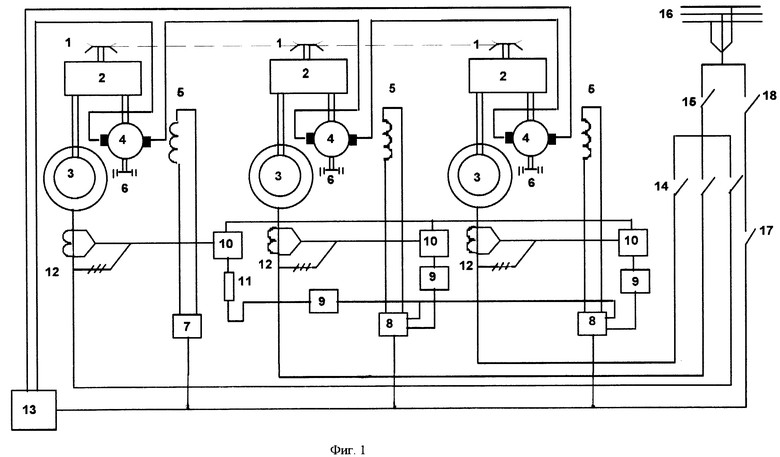
Многодвигательный привод конвейерных систем, содержащий отдельные базовый и зависимые приводы с асинхронными короткозамкнутыми двигателями, дифференциальными редукторами и двигателями постоянного тока, у которых обмотки постоянного тока соединены последовательно и подключены к общему источнику постоянного тока регулируемого напряжения, датчики активного тока базового и зависимых приводов и регуляторы, к которым подключены обмотки возбуждения зависимых приводов, причем одни входы датчиков активного тока зависимых приводов соединены с входом датчика активного тока базового привода, вторые входы всех датчиков активного тока соединены с первичными измерительными элементами, а к выходу датчика активного тока подключен добавочный резистор, отличающийся тем, что он снабжен нелинейными элементами по числу приводов с U-образной выходной характеристикой, причем выходы датчиков активного тока зависимых приводов подключены через соответствующие нелинейные блоки к входам регуляторов, а выход датчика активного тока базового привода через последовательно соединенные добавочный резистор и соответствующий нелинейный элемент подключен к входам всех регуляторов.
| Многодвигательный привод конвейерных систем | 1974 |
|
SU656930A1 |
| Устройство для управления многоприводной подъемно-транспортной установкой | 1978 |
|
SU781144A1 |
| Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1986 |
|
SU1425141A1 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Погорский Н.А | |||
| Электрические трансмиссии машин с мотор-колесами.- М.: Машиностроение, 1971, с | |||
| Способ получения коричневых сернистых красителей | 1922 |
|
SU335A1 |
