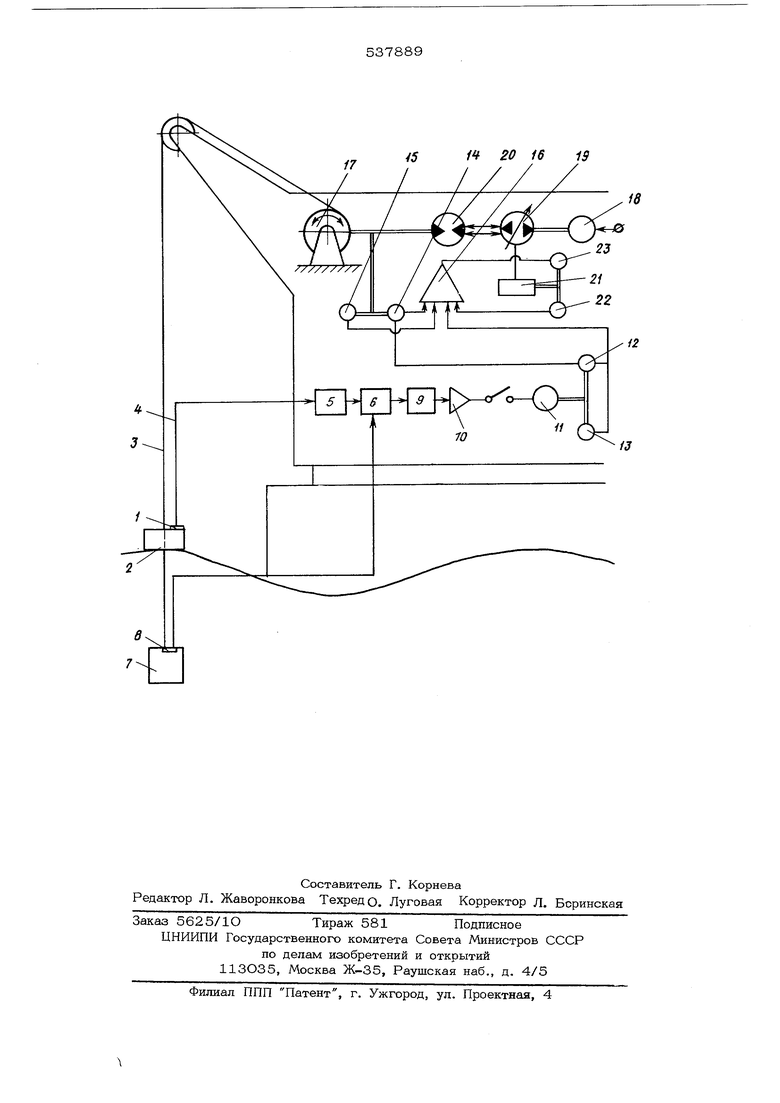
(54) УСТРОЙСТВО ДЛЯ СТАВИЛИЗАЦИИ НА ЗАДАННОЙ ГЛУБИНЕ ОПУЩЕННЫХ НА ТРОСЕ ОБЪЕКТОВ са 3. Выход акселерометра 1 соединен электрическим кабелем 4 с интегратором 5, выход которого соединен с одним из входов сумматора 6, другой вход которого соединен с выходом установленного на объекте 7 датчика 8 глубины, а выход со следящей системой лебедки, состоящей из последовательно соединенных пульта 9 контроля и управления, усилителя Ю, реверсивного двигателя 11, кинематически связанного с задающими сельсинами 12 грубого и точного отсчета ис тахогенера- тором 13, который связан с принимающими сельсинами 14 грубого и точного отсче та и вторыми тахогенераторами 15 и усилителем 16. Тахо генератор 15 и сельсины 14 кинематически связаны с механизмом подъема и спуска объекта 7, сэстоящи1М из лебедки с барабаном 17 и бесступенчатой, например гидравлической, передачи в составе приводного электродвигателя 18, гидронасоса 19 и гидромотора 2О. Гидронасос 19 механически сообщается с гидроусилителем 21, соединенным с третьим тахогенератором 22 и с управляемым реверсивным электродвигателем 23, подключенным к вьь ходу усилителя 16. Устройство работает следующим образом. При проведении океанологических исследований в условиях волнения измеритель вертикальных перемещений водной поверхности, состоящий из акселерометра 1, установленного н-а поплавке 2, свободно перемещающемся на волне относительно троса и интегратора 5 вырабатывает сигнал, про порциональный вертикальным перемещениям водной поверхности, который подается на вход сумматора 6. В то же время датчик 8 глубины, выполненный в виде гидростата, установленного на опущенном под во ду объекта 7 с аппаратурой, въграбатывае сигнал, пропорциональный суммарному изменению глубины погружения объекта 7, вызванному качкой судна и вертикальными перемещениями водной поверхности, обуслов ленными волнением, который также подается на вход сумматора 6. Причем вертикаль- 50 ные перемещения водной поверхности, воздействуя в равной степени на упомянутые измеритель и датчик, приводят к появлению в первом из них электрического сигнала, пропорционального этому перемещение, а во втором к образованию составляющей сигнала датчика, равной по величине и противо лоложной по знаку сигналу измерителя перемещений. Суммируя сигналы измерителя вертикальных перемещений и датчика глубины, сумматор 6 исключает из сигнала датчика глубины его составляющую, обусловленную вертикальными перемещениями водной поверхности, и выдает на следящую систему сигнал, пропорциональный перемещениям объекта 7 от качки судна. Этот сигнал передается через пульт 9 контроля и управления и усилитель 10 на двигатель 11. Последний, поворачиваясь на угол, пропорциональный принятому сигналу, въграбатывает соответствующий сигнал в сельси нах 12, который передается на сельсины 14, вырабатывающие, в свою очередь, сигнал, пропорциональный углу рассогласования между ними и сельсинами 12; и передающие этот сигнал на вход основного усилителя 16. Усиленный сигнал через электродвигатель 23j гидроусилитель 21 и гидронасос 19 управляет направлением и скоростью вращения выходного вала гидромотора 20, приводящего во вращение барабан 17, который вытравливает или выбирает трос 3 на величину вертикального перемещения датчика 8 глубины, вызванного качкой судна. При этом объект 7 устанавливается на заданной глубине, выходной сигнал сумматора 6, постепенно уменьщаясь, становится равным нулю, после чего гидромотор 2О останавливается. Применение измерителя вертикальных перемещений водной поверхности в совокупности с датчиком глубины позволяет стабилизировать объект на заданной глубине при его отклонениях под воздействием качки судна и предотвращает влияние вертикальных перемещений водной поверхности, обусловленных волнением, на перемещение объекта, повыщая тем самым эффективность использования океанографических приборов и улучщая условия работы всего спуско-подъемного комплекса. Формула изобретения Устройство для стабилизации на заданной глубине опущенных на тросе объектов по авт. ев, № 4О1561, отличающееся тем, что, с целью повыщения точности стабилизации объекта, оно снабжено измерителем вертикальных перемещений водной поверхности над погруженным объектом, включающим в себя, например, акселерометр. установленный на поплавке, свободно перемещающемся на волне относительно троса, и интегратор; сумматором, входы которого соединены соответственно с выходами датчика глубины и измерителя вертикальных перемещений водной поверхности над объектом, а выход - со следящей системой лебедки. i4 20 16 19
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации на заданной глубине опущенных на канате объектов | 1976 |
|
SU598793A1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| ГИДРОСИСТЕМА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА ВОДОЛАЗНОГО КОЛОКОЛА | 2009 |
|
RU2403170C1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| ГРУЗОПОДЪЕЛ1НЫЙ КРАН | 1973 |
|
SU380523A1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |
| ГИДРОСИСТЕМА СПУСКОПОДЪЕМНОГО УСТРОЙСТВА ВОДОЛАЗНОГО КОЛОКОЛА | 2005 |
|
RU2296692C1 |