(54) РЕГУЛЯТОР ТОРМОЖЕНИЯ ПОДВИЖНОЙ
ПОПЕРЕЧИНЫ ГИДРАВЛИЧЕСКОГО ПРЕССА
точности ковки посредством обеспеч ния торможения подвижной поперечины с постоянным ускорением. Поставленная цель достигается ем, что в регулятор, содержащий датчик выходного параметра, задающее устройство, блоки сравнения, усилитгпь мощнрсти, рабочий и демпфирующий электродвигатели, редуктор и гидроусилитель введено вычислительное устройство кинетической энергии подвижной поперечины, выполненное в виде двух тахогенераторов переменного тока, связанных механически с подвижной поперечиной пресса и электрически между собой. В качестве тахогенераторов используются асинхронные двигатели с полым ротором. Для повышения устойчивости, в зоне около среднего положения выходного штока гидроусилителя, вычислительное устройство выполнено с пропорциональной отрицальной обратной связью в виде сельсина, связанного механически с выходным штоком гидроусилителя.
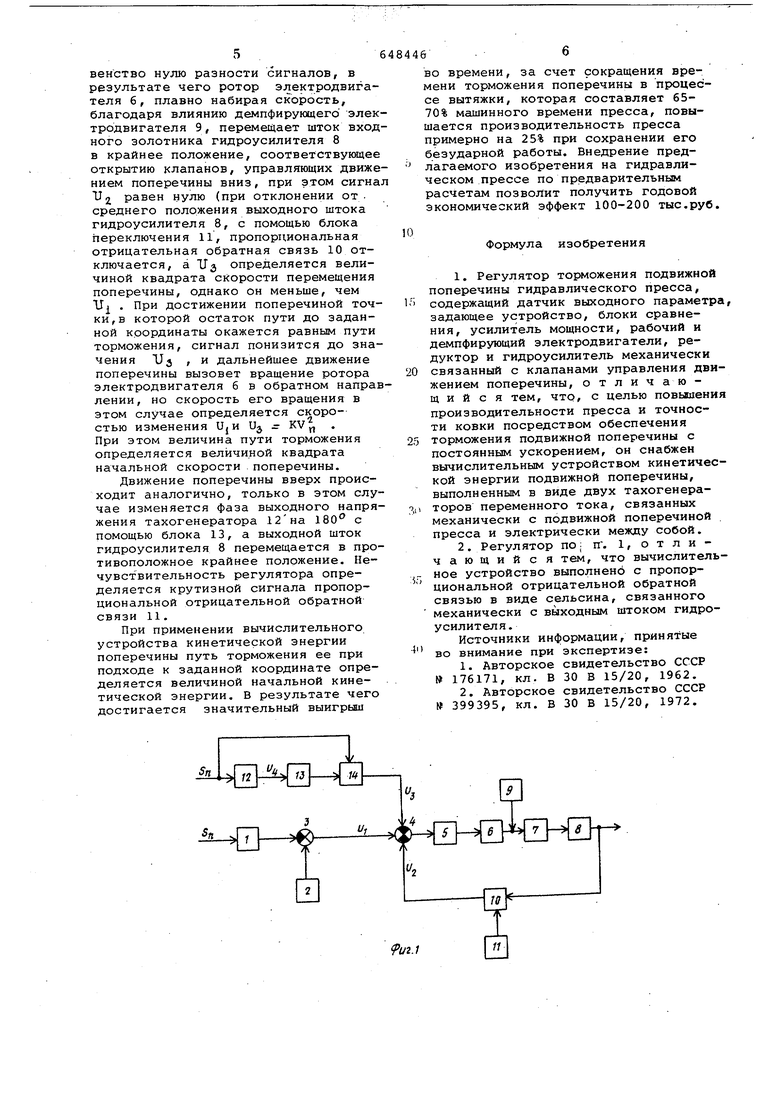
На фиг. 1 представлена блок-схема регулятора торможения подвижной поперечины гидравлического пресса; на фиг. 2 приведены графики изменения скорости поперечины, в функции пути. Регулятор торможения содержит датчик 1 выходного параметра (координаты перемещения подвижной поперечины) , задающее устройство 2, блок сравнения сигналов 3 датчика выходного параметра и задающего устройства, блок сравнения сигналов 4, усилитель мощности 5, рабочий электродвигатель 6, редуктор 7, гидроусилитель 8, демпфирующий электродвигатель 9, вычислительное устройство, состоящее iis пропорциональной отрицательной обратной связи 10, в виде сельсина, связанного механически с выходным штоком гидроусилителя 8, блок переключения 11 пропорциональной отрицательной обратной связи 10, тахогенератора переменного тока 12, блока реверса фазы 13 выходного напряжения тахогенератора 12, питаемого от отдельного источника ( не показан) тахогенератора переменного тока 14.
При поступлении на вход блока сравнения 4, кроме сигнала пропорционального координате подвижной поПёрёчины, и сигнала пропорционального квадрату текущего значения скорости, торможение поперечины будет происходить с постоянным темпом замедле- нйя7 т , ё.
dV,
const...
-01п dt
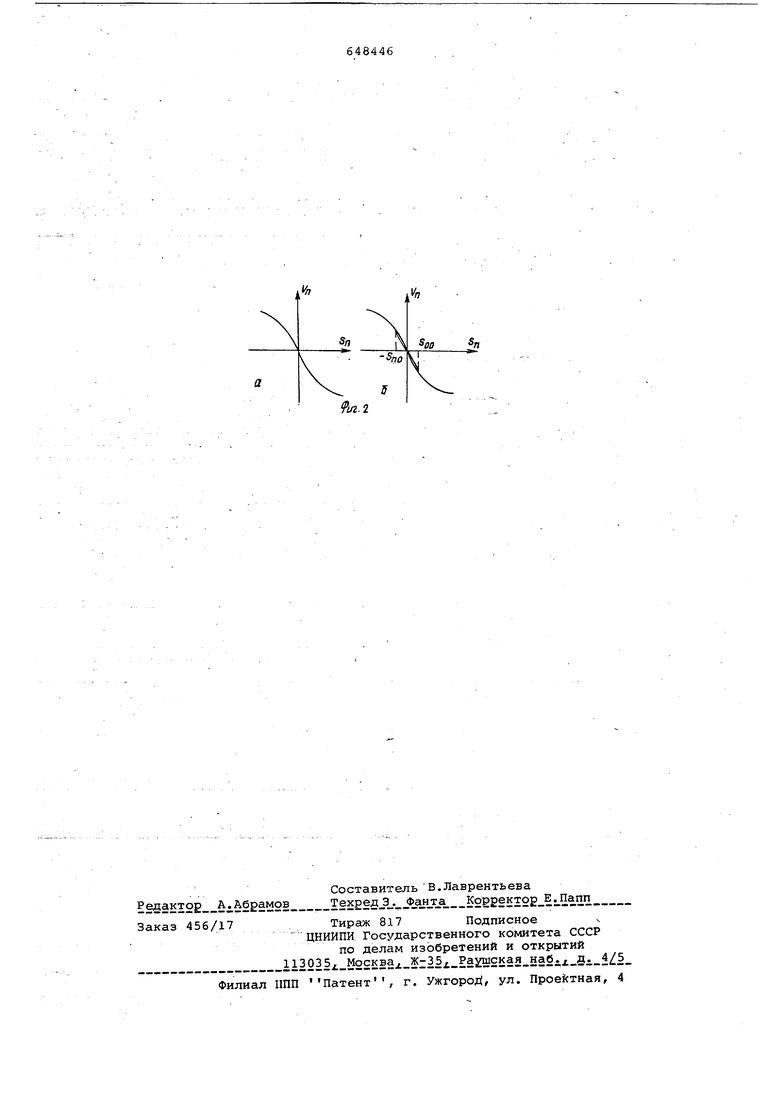
а изменение скорости движения поперечины по мере приближения к заданпараболическому
ному положению по закону (фиг. 2).
Л Н2а,... (2)
где 5п - остаток пути, который должна пройти поперечина до заданной точки реверса. Время замедления поперечины
Vnn-Y
V
по
ПК
по
(3)
птах
п max
гдеУ по ,Vf,к - начальная и конечная скорости движения поперечины. Из рассмотрения фиг. 2а видно, что крутизна характеристикиУп 1( зоне около нуля очень велика и стремится к бесконечности. В результате этого, совокупный коэффициент усиления системы автоматического управления прессом, в которой будет применяться предлагаемый регулятор, в этой зоне будет превьлшать критическую величину, определяющую границу устойчивости. Для исключения этого недостатка характеристикаУ Цб,) должна соответствовать : зависимости (фиг.2б).
-К5„при(5п(6по)
Yn
Ci
1- 2а„5;при(б„1(5п)
где - критический коэффициент усиления
Sr,- -точка излома характеристики ..
Первое из этих уравнений характеризует линейную зависимоть скорости от перемещения поперечины, а работа устройства осуществляется с помощью включения в интервале-(6цо, Зло ) пропорциональной отрицательной обратной связи по положению выходного штока гидроусилителя 8, выполненной в виде сельсина, связанного механически с выходным штоком гидроусилителя.
Второе уравнение - нелинейное, которое характеризует работу устройства в интервале (Snol/C rt ) квадратичной обратной связью по текущему значению скорости поперечины, пропорциональная отрицательная обратная связь 10 в этом интервале отключена с помощью блока 11.
Для рассмотрения работы устройствапредположим, что подвижная поперечина в соответствии с установлекным заданием находится над поковкой. Б этом случае Uj- U О, ротор электродвигателя 6 неподвижен, выходной шток гидроусилителя 8 занимает среднее положение, клапаны пресса зарыты и поперечина неподвижна. При ввдёйии нового зада;ния нарушается равенство нулю разности сигналов, в результате чего ротор электродвигателя 6, плавно набирая скорость, благодаря влиянию демпфирующего электродвигателя 9, перемещает шток входного золотника гидроусилителя 8 в крайнее положение, соответствующее открытию клапанов, управляющих движением поперечины вниз, при этом сигна TJr равен нулю (при отклонении от. среднего положения выходного штока гидроусилителя 8, с помощью блока переключения 11, пропорциональная отрицательная обратная связь 10 отключается, а IT определяется величиной квадрата скорости перемещения поперечины, однако он меньше, чем И . При достижении поперечиной точки, в которой остаток пути до заданной координаты окажется равным пути торможения, сигнал понизится до значения TJ , и дальнейшее движение поперечины вызовет вращение ротора электродвигателя 6 в обратном направлении, но скорость его вращения в этом случае определяется скоростью изменения Uj и U KV , . При этом величина пути торможения определяется величиной квадрата начальной скорости поперечины.
Движение поперечины вверх происходит аналогично, только в этом случае изменяется фаза выходного напряжения тахогенератора 12на 180 с помощью блока 13, а выходной шток гидроусилителя 8 перемещается в противоположное крайнее положение. Нечувст вительность регулятора определяется крутизной сигнала пропорциональной отрицательной обратной связи 11.
При применении вычислительного устройства кинетической энергии поперечины путь торможения ее при подходе к заданной координате определяется величиной начальной кинетической энергии. В результате чего достигается значительный выигрыш
во времени, за счет сокращения времени торможения поперечины в процессе вытяжки, которая составляет 6570% машинного времени пресса, повышается производительность пресса примерно на 25% при сохранении его безударной работы. Внедрение предлагаемого изобретения на гидравлическом прессе по предварительным расчетам позволит получить годовой экономический эффект 100-200 тыс.руб
Формула изобретения
1.Регулятор торможения подвижной поперечины гидравлического пресса,
содержащий датчик выходного параметра, задающее устройство, блоки сравнения, усилитель мощности, рабочий и демпфирующий электродвигатели, редуктор и гидроусилитель механически
связанный с клапанами управления движением поперечины, отличающийся тем, что, с целью повыиения производительности пресса и точности ковки посредством обеспечения
торможения подвижной поперечины с постоянным ускорением, он снабжен вычислительным устройством кинетической энергии подвижной поперечины, выполненным в виде двух тахогенераторов переменного тока, связанных механически с подвижной поперечиной пресса и электрически между собой.
2.Регулятор по; п . 1, отличающийся тем, что вычислительное устройство выполнено с пропорциональной отрицательной обратной
связью в виде сельсина, связанного механически с выходным штоком гидроусилителя.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР 176171, кл. В 30 В 15/20, 1962.
2.Авторское свидетельство СССР № 39939S, кл. В 30 В 15/20, 1972.
oa n
no S
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический усилитель системы управления гидравличесим прессом | 1976 |
|
SU582995A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU770841A1 |
| Регулятор торможения поперечины гидравлического пресса | 1976 |
|
SU597574A1 |
| Регулятор торможения поперечины гидравлического пресса | 1978 |
|
SU727477A1 |
| Регулятор торможения поперечиныгидРАВличЕСКОгО пРЕССА | 1979 |
|
SU821206A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821205A1 |
| Следящая система управления валом гидрораспределителя гидравлического ковочного пресса | 1986 |
|
SU1361020A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| РЕГУЛЯТОР ТОРМОЖЕНИЯ ТРАВЕРСЫ ГИДРАВЛИЧЕСКОГО ПРЕССА,-1.п^.зг? с'.;~ ;,-.,.„,.,iJ^yU^^ Wi.-.-=i^=i «Vi«ь »tf да I«.^—г=.«*-»Л74* | 1973 |
|
SU399395A1 |
| Устройство для дистанционного регулирования скорости прессования | 1958 |
|
SU117775A1 |