объекта регулирования при колебаниях скорости вращения приводного двигателя или действии возмущающего воздей-. ствия и повышении надежности.
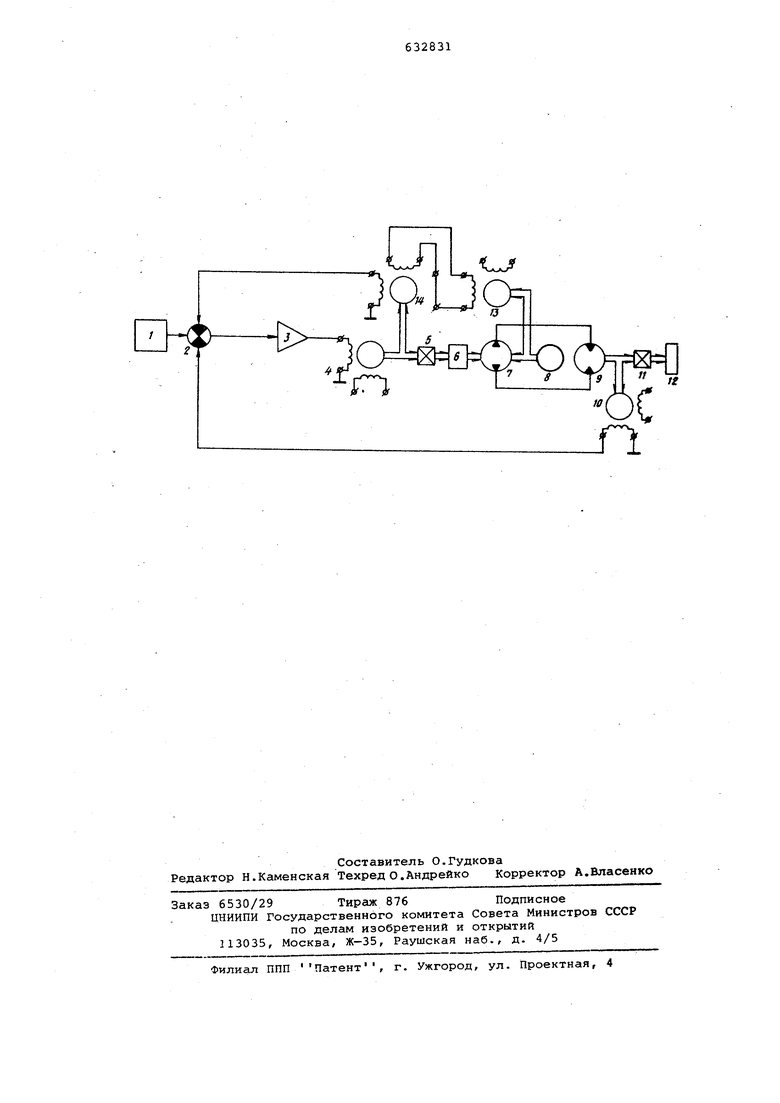
Это достигается за счет того, что выходные обмотки тахогенератора приводного вала насоса соединены с обмоткой возбуждения тахогенератора управляющего двигателя, выход которого подключен к третьему входу сумматора « На чертеже представлена функциональная схема электрогидравлической следящей системы, в которой приняты следующие обозначения: 1 - задающий блок, 2 - сумматор, 3 - усилитель, 4 - управляющий двигатель, 5 - редуктор механизма управления, б - гидроусилитель, 7 - насос (переменной производительности) , 8 - приводной двигатель, 9 - гидродвигатель, 10 - тахогенератор на валу гидродвигателя, 11 - силовой редуктор, 12 - объект регулирования, 13 - тахогенератор на приводном валу насоса, 14 - тахогенератор управляющего двигателя.
Выход тахогенератора 10, установленного на валу гидродвигателя, соединен с вторым входом сумматора 2.
На валу приводного двигателя 8 установлен тахогенератор 13, выходные обмотки которого подключены к обмотке возбуждения тахогенератора 14, установленного на валу управляющего электродвигателя 4, Выход тахогенератора 14 подключен к третьему входу сумматора 2„
При работе электрогидравлической системы управления.на сумматор 2 поступают сигналы от задающего блока 1, тахогенератора 10, установленного на валу гидродвигателя 9, и тахогенератора 14, установленного на валу управляющего двигателя 4. Система обеспечивает наведение объекта регулирования 12 со скоростью, соответствующей величине входного напряжения с задающего блока 1. Нри подаче с задающего блока 1 другой величины входного напряжения управляющий двигатель 4, вращаясь с заданной скоростью, управляет через редуктор 5 и гидроусилитель 6 насосом 7 с гидродвигателем 9, который наводит объект регулирования 12 с требуемым ускорением. Сигнал с тахогенератора 14, установленного на валу управляющего электродвигателя 4, стабилизирует скорость вращения управляющего электродвигателя 4. При колебаниях скорости вращения приводного двигателя 8 из-за изменения режимов его работы (например из-за изменения напряжения
сети питания или просадки под дейст-вием возмущающего момента на объект регулирования 12) насос 7 вращается с переменной скоростью, однако благодаря компенсационной связи с тахогенератора 13, установленного на валу приводного двигателя 8, через тахогенератор 14, на сумматор 2, управляющий электродвигатель 4 управляет органом регулирования насоса 7, таким образом, чтобы скомпенсировать переменную скорость вращения приводного двигателя 8 и обеспечить при этом стабильные производительность насоса 7 и режимы наведения объекта регулирования 12, соответствующие только управляющему сигналу.
Предлагаемая система наведения выгодно отличается от известных и при значительных колебаниях скорости приводного двигателя обеспечивает высокую точность регулирования ускорения и тем самым повышает качество работы объекта регулирования. Кроме того, изобретение позволяет использовать приводной двигaтeл 5 меньшей мощности и снижает требования к стабильности скорости приводного, двигателя, что дает возможность расширить сферу применения следящей системы.
Формула изобретения
Электрогидравлическая следящая система, содержащая последовательно соедин.энные задающий блок, сумматор, усилитель, управляющий двигатель с тахогенератором, редуктор механизма управления, гидроусилитель, насос с приводным двигателем, гидродвигатель с тахотенератором, подключенным ко второму входу сумматора, и тахогенератор на приводном валу насоса, о тличающаяся тем, что, с цель повышения быстродействия и надежности системы, выходные обмотки тахогенератора приводного вала насоса соединены с обмоткой возбуждения тахогенератора управляющего двигателя/ выход которого подключен к третьему входу сумматора.
Источники информации, принятые во внимание при экспертизе:
1. Аксиально-поршневой регулируемый гидропривод под ред,В.Н.Прокофьева, Мшшностроение , М. , 1969, с. 257-261.
2. Заявка № 2063800/24, кл. F 15 В 9/03, 1974, по которой принято решение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| Электрогидравлический привод подачи деревообрабатывающего станка | 1984 |
|
SU1166991A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| ЭЛЕКТРОГИДРЛВЯИЧЕСКЛЯ СЛЕДЯЩАЯ СИСТЕМА | 1976 |
|
SU826100A1 |
| Гидравлический привод объемного регулирования | 1982 |
|
SU1030588A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ЭЛЁКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407274A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |