4
00 со
СП 1чЭ
СО
14
Изобретение относится к системам аитоматического управления а именно к .следящим.системам приборного назначения, и может использоваться в следящих системах минимального веса и габаритов, требующих высокой надежности. Прежде всего это следящие системы классической структуры, содержащие основные элементы вида: измеритель рассогласования, усилитель, двигатель, тахогенератор, редуктор. Изобретение целесообраз- ,но использовать в авиационных и транспортных прибораХзЗ опорно-пово- ротных маломощньп : механизмах моде- л:иру101п;их стендов,, роботах-манипуляторах-, при автоматизации технологических процессов. Наибольшее значение
тор 9 не срабатывает. Сигнал рассогласования с измерителя 1 рассогласования поступает также на первый вход сумматора 2, где происходит его суммирование с сигналом скоростной обратной связки, поступающим на второй вход сумматора 2, Выходной сигнал сумматора 2 поступает на усилитель 3 с переменным коэффициентом усиления.
При исправном двигателе 5 сигнал, поступающий от компаратора 9 на второй управляющий вход усилителя 3, равен нулю, и в этом случае коэс1)фи- 1щент усиления усилителя 3 равен расчетному значению коэффициента усиления для системы с исправным двигателем 5, Усиленный сигнал с выхода
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1984 |
|
SU1216773A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Устройство для защиты электропривода постоянного тока от изменения заданной скорости вращения | 1983 |
|
SU1179474A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2241247C1 |
| Следящая система | 1981 |
|
SU993202A1 |
| Следящая система | 1976 |
|
SU611177A1 |
| Следящая система | 1979 |
|
SU849133A2 |
| Следящая система | 1978 |
|
SU711538A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
25
30
35
Изобретение име.ет для систем,в кото- 20 : усилителя 3 поступает на второй вход
коммутатора 10 и через его нормально замкнутые контакты на выход этого коммутатора 10. Так как при исправном двигателе 5 на первом входе коммутатора 10 отсутствует управляющий сигнал от компаратора 9, то сигнал с третьего входа коммутатора 10 не проход11Т на его выход. Сигнал с первого коммутатора 10 поступает на усилитель 4 мощности, после усиления на котором он поступает : на вход второго коммутатора 11. При отсутствии сигнапа от компаратора 9 на управляющем входе он проходит на первьш выход этого коммутатора, соединенный с управляющей обмоткой двигателя 5„ Двигатель 5 приводится во вращение и через редуктор 7 поворачивает вал объекта на величину угла, пропорционального рассогласованию, т.е, до тех пор, пока разность между величиной входного воздействия и углом поворота не станет рав- . ной нулю.. Сигналы на первом и вто- 45 ром входах измерителя 1 рассогласования одинаковы. Выходной вал двигателя 5 соединен с тахогенератором 6, который вырабатывает напряжение,про- порхдаональное скорости вращения двигателя 5, Сигнал скоростной обратной связи с выхода тахогенератора 6 - с его сигнальной обмотки - поступа- ет на второй вход к.пюча 12 и при отсутствии управляющего сигнала от компаратора 9 на входе этого ключа проходит без изменений через ключ 12 на второй вход сумматора 2.
Рассмотрим работу Г1редла1 аемой следящей системы в режиме с отказаврых двигате,11Ь работает в напрялсенном динамическом режиме и имеет наиболь- Ш ее число отказов среди других элементов.
Цель изобретения повьшение надежности при сохранении массогаба- ритнь х показателей c.eдяIцeй системы.
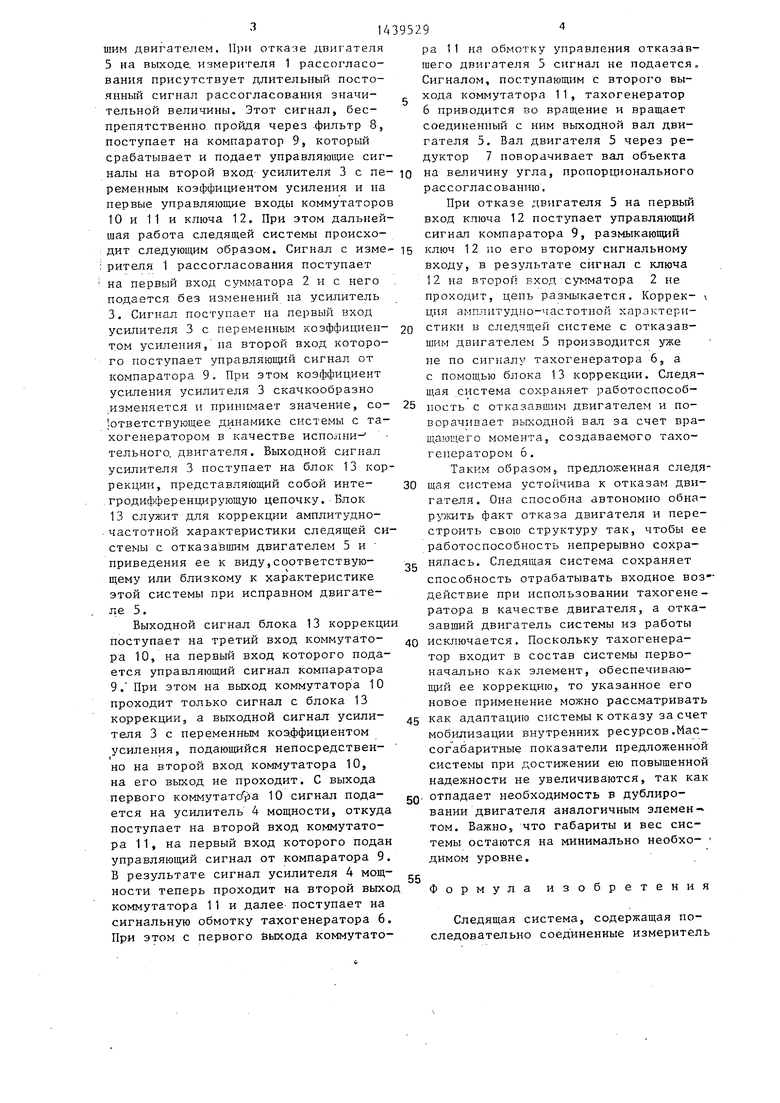
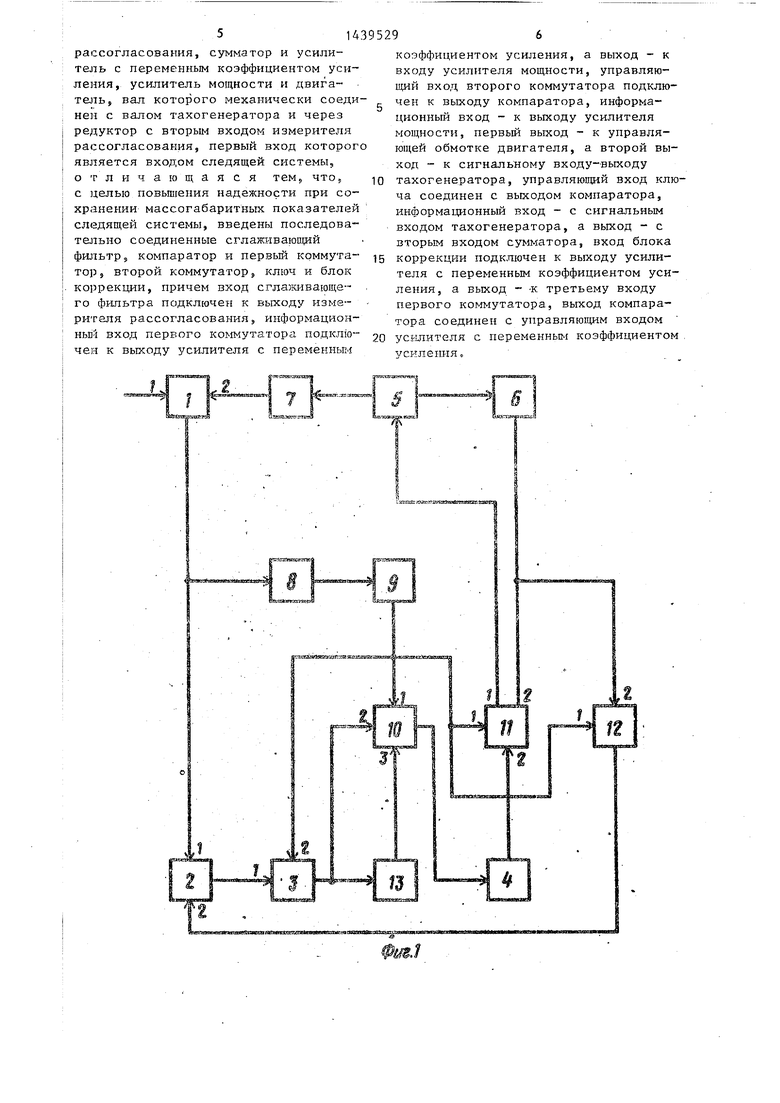
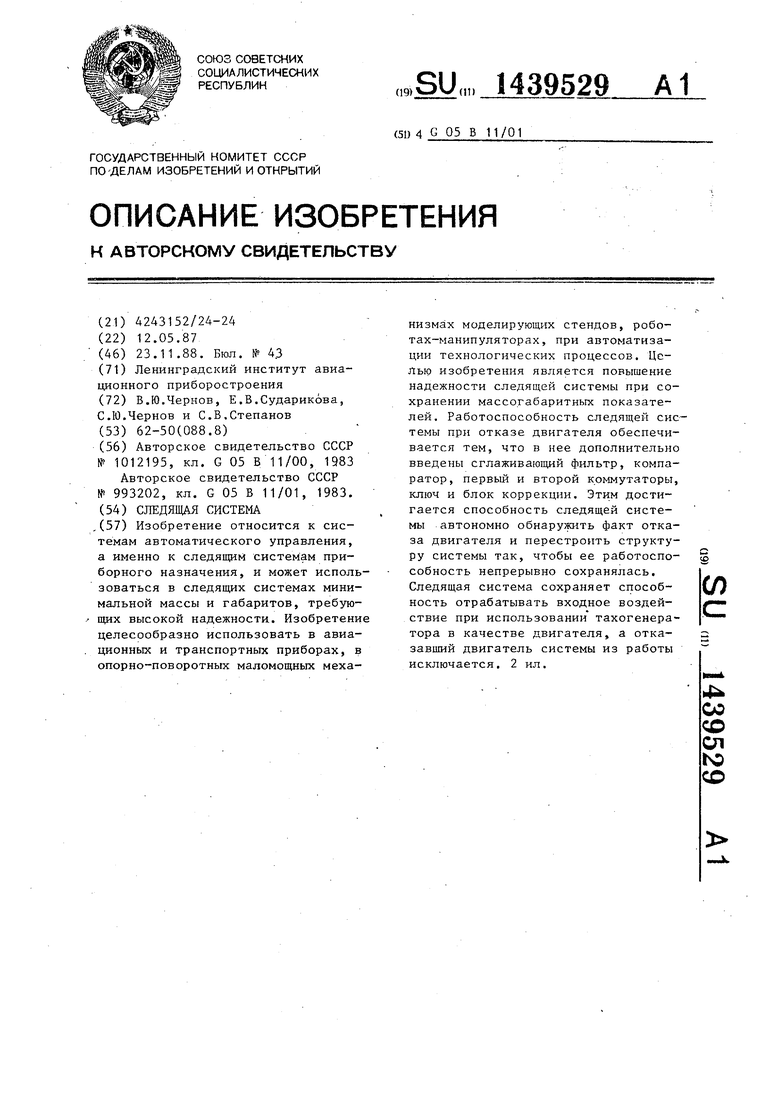
На . 1 представлена блок-схема системы; на фиг.2 - вариант выполнения блока коррекции на базе интег.рс5- дифференцирующего звена.
Следящая система содержит измеритель 1 рассогласования., сумматор 2 усилитель 3 с переменным коэффициентом усиления, усилитель 4 мощности, двигатель 5,, тахогенератор б, редуктор 7, сглаживающий фильтр 8, компаратор 9, первьш и второй коммутаторы 10 и 11, ключ 12 и блок 13 коррекции „ .
Рассмотрим работу предлагаемой следящей системы в режиме с исправным двигателем. В начальный момент работы системы с исправным двигателем 5 на выходе измерителя 1 рассогласования появляется сигнал, пропорциональный всплеску рассогласования. Длительность всплеска определяется быстротой отработки .рассогласования следящей системой, С выхода измерителя 1 рассогласования всплеск поступает на сглаживающий фильтр 8 с большой постоянной времени. Кратковременный всплеск рассогласования подавляется фильтром 8. При исправном двигателе 5 сигнал на выходе фильтра 8 близок к нулю и, следовательно оказывается меньше порога срабатывания компаратора 9, Компара40
50
55
шим двигателем. При отка-.ie двигателя 5 на выходе, измерителя 1 рассогласования присутствует длительный постоянный сигнал рассогласования значительной величины. Этот сигнал, беспрепятственно пройдя через .фильтр 8, поступает на компаратор 9, который срабатывает и подает управляюиц е сигналы на второй вход усилителя 3 с пе- ременным коэффициентом усиления и на первые управляющие входы коммутаторов 10 и 11 и ключа 12, При этом дальнейшая работа следящей системы происхо20
входу, в результате сигнал с ключа 12 на второй вход сумматора 2 не проходит, цепь размыкается. Коррекция амплитудно-частотной характеристики в следяш,ей системе с отказавшим двигателем 5 производится уже не по сигналу тахогенератора 6, а с помощью блока 13 коррекции. Следя щая система сохраняет работоспособ25
30
дит следующим образом. Сигнал с изме- 15 ключ 12 по его второму сигнальному рителя 1 рассогласования поступает на первый вход сумматора 2 и с него . подается без изменений на усилитель 3. Сигнал поступает на первый вход усилителя 3 с переменным коэффициентом усиления, на второй вход которого поступает управляющий сигнал от компаратора 9. При этом коэффициент усиления усилителя 3 скачкообразно .изменяется и принимает значение, со- ответствующее динамике системы с та- хогенератором в качестве исполни- тельного, двигателя. Выходной сигнал усилителя 3 поступает на блок 13 коррекции, представляющий собой инте- гродифференцирующую цепочку. Блок 13 служит для коррекции амплитудно- частотной характеристики следящей системы с отказавшим двигателем 5 и приведения ее к виду,соответствующему или близкому к характеристике этой системы при исправном двигателе 5.
Выходной сигнал блока 13 коррекции Поступает на третий вход коммутатора 10, на первый вход которого подается управляющий сигнал компаратора 9. При этом на выход коммутатора 10 проходит только сигнал с блока 13 коррекции, а выходной сигнал усилителя 3 с переменным коэффициентом усиления, подающийся непосредственно на второй вход коммутатора 10, на его выход не проходит. С выхода первого коммутатоуза 10 сигнал подается на усилитель 4 мощности, откуда поступает на второй вход коммутатора 11, на первый вход которого подан управляющий сигнал от компаратора 9. В результате сигнал усилителя 4 мощности теперь проходит на второй выход коммутатора 11 и далее, поступает на сигнальную обмотку тахогенератора 6. При этом с первого Выхода коммутато-
пость с отказавшим двигателем и поворачивает выходной вап за счет вра щающего моьшнта, создаваемого тахо- геператором о.
Таким образом, предложенная след щая система устойчива к отказам дви гателя. Она способна автономно обна р окить факт отказа двигателя и пере строить свою структуру так, чтобы е работоспособность непрерывно сохра2g нялась. Следящая система сохраняет способность отрабатывать входное во действие при использовании тахогене ратора в качестве двигателя, а отка завший двигатель системы из работы
40 исключается. Поскольку тахогенератор входит в состав системы первоначально как элемент, обеспечивающий ее коррекцию, то указанное его новое применение можно рассматриват как адаптацию системы к отказу за сче мобилизации внутренних ресурсов.Мас согабаритные показатели предложенно системы при достижении ею повышенно надежности не увеличива;ются, так ка отпадает необходимость в дублировании двигателя аналогичным элементом. Важно, что габариты и вес системы остаются на минимально необходимом уровне.
45
50
55
Формула изобретени
Следящая система, содержащая последовательно соединенные измерител
ра 11 на обмотку управления отказав- гаего двигателя 5 сигнал не подается. Сигналом, поступающим с второго выхода коммутатора 11, тахогенератор 6 приводится во вращение и вращает соединенный с ним выходной вал двигателя 5. Вал двигателя 5 через редуктор 7 поворачивает вал объекта на величину угла, пропорционального рассогласованию.
При отказе двигателя 5 на первьш вход ключа 12 поступает управляющий сигнал компаратора 9, размыкающий
входу, в результате сигнал с ключа 12 на второй вход сумматора 2 не проходит, цепь размыкается. Коррек ция амплитудно-частотной характеристики в следяш,ей системе с отказавшим двигателем 5 производится уже не по сигналу тахогенератора 6, а с помощью блока 13 коррекции. Следящая система сохраняет работоспособключ 12 по его второму сигнальному
ключ 12 по его второму сигнальному
пость с отказавшим двигателем и поворачивает выходной вап за счет вращающего моьшнта, создаваемого тахо- геператором о.
Таким образом, предложенная следящая система устойчива к отказам двигателя. Она способна автономно обна- р окить факт отказа двигателя и перестроить свою структуру так, чтобы ее работоспособность непрерывно сохранялась. Следящая система сохраняет способность отрабатывать входное воздействие при использовании тахогенератора в качестве двигателя, а отказавший двигатель системы из работы
исключается. Поскольку тахогенератор входит в состав системы первоначально как элемент, обеспечивающий ее коррекцию, то указанное его новое применение можно рассматривать как адаптацию системы к отказу за счет мобилизации внутренних ресурсов.Мас- согабаритные показатели предложенной системы при достижении ею повышенной надежности не увеличива;ются, так как отпадает необходимость в дублировании двигателя аналогичным элемен том. Важно, что габариты и вес системы остаются на минимально необхо димом уровне.
55
Формула изобретения
Следящая система, содержащая последовательно соединенные измеритель
S saiasefteCKKSlt: я
н--$
i
I.J
фие.г
| Двухдвигательный привод | 1981 |
|
SU1012195A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
