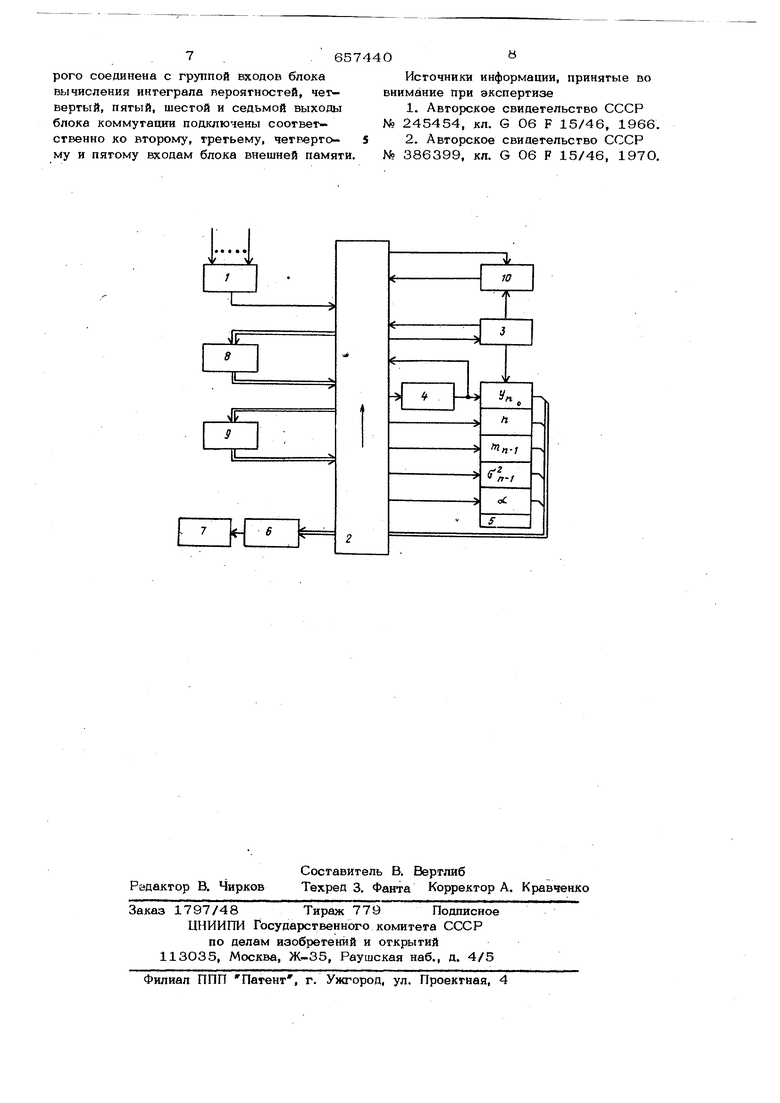
Изобрегение относится к области вычислительной техники и можег быть использовано для контроля параметров и прогнозирования аварийных режимов конгролируемых объектов. Известно устройство для контроля па- раметров, содержащее датчики, блоки уставок и блоки сравнения, которые соединены через масштабирукший блок с выходом переключателя, один вход которого подключен к регулируемому источнику сиг нала, а второй - к источнику периодически изменяющегося сигнала. Это устройство позволяет оценивать степень близости текущего значения параметра к его аварийным значениям. Недостатком указанного устройства я& ляется отсутствие возможности определения вероятности выхода текущего значе-. ния параметра за его аварийное значение l. Наиболее близким к данному по сущности технического решения является устройство для профилактической диагности- ки, которое содержит блок коммутации контролируемых объектов, входы которого подключены к соответствующим входам устройства, а выход - к первому взузду блока коммутации, вторым входом соединенного с выходом блока оперативной памяти и первым входом блока внешней памяти, группа выходов которого подключена к первой группе входов блока коммутации, первый и второй выходы которого соответственно соединены со входом блока оперативной памяти и входом блока управления, подключенного первым и вторым выходами соответственно к управляющим входам блока коммутации и блока внешней памяти, блок регистрации, соединенный входом с выходом блока вычисления интеграла вероятностей. Недостатком этого устройства является низкое быстродействие и сложность его конструкции, что значительно снижает возможность эффективного использования для ряда специфических производств, например, прогнозирования аварийных ситуаций потенциально опасных технологических процессов химичео их производств 121. Целью изобретения яв шется повышение быстродействия и упрощение устройства. Поставленная цель достигается тем, что в устройство введены блок суммирования, блок вычисления рассогласования и блок вычисления значения параметра, причем блок суммирования входом и выходом подключен соответственно к третьему выходу и третьему входу блока коммутации, а управляющим входбм - к третьему выходу блока управления, вторая группа входов и первая группа выхо дов блока коммутации подключены соответственно к группам выходов и входов блока вычисления рассогласования, группы входов и выходов блока вычисления значения параметра соединены соогвет ственно со второй группой выходов и третьей группой входов блока коммуташ третья группа выходов которого соединена с группой входов блока вычисления интеграла вероятностей, четвертый, пяты шестой и седьмой выходы блока коммута шга подключены соответственно ко второ му, третьему, четвертому и пятому входам блока в нешней памяти. На чертеже показана блок-схема устройства, которое содержит блок 1 коммутации контролируемых объектов, блок 2 коммутации, блок 3 управления, блок 4 оперативной памяти, блок 5 внешней памяти, блок 6 вычисления интеграла вероятностей, блок 7 регистрации, блок 8 вычисления рассогласования, блок 9 вычисления значения параметра и блок 1О суммированЕя. Блок 2 коммутации осуществляет фун цию соединения между блоками устройст ва, в блоке 4 оперативной памяти временно хранятся результаты текущей обра ботки данных контроля, в блоке 5 внещней памяти хранятся данные по результа там предыдущих обработок. Блок 8 вы числения, рассогласования устройства имеет 4 входа (Xj, Х Х, ) и 3 и,1хода (z, , Zj, Zj) иреапизуе следующие соотношения: z, x,-x,r .(Z,,); 2,(,j) -Х Блок 9, реализующий рекуррентное вычисление параметра, вмеег 3 входа (Х 7 реализует следуюихее соотнощение: -, Блок 10, в зависимости от управления, производит суммирование числа пре- дыцушнх обработок либо с величиной (-2), либо с (+l). Перед началом работы в блок 5 внещней памяти заносятся следующие величины:АУ„ П1„ , б„ ,0 я-1 -п-Г oL п I , где; у - предсказанное значение определяклдего параметра в л -и точке; т ,, числовые величины, опредеП-1 rl-l ляюшие математическое ожидание и дисПерсию многомерной случайной функции состояния контролируемого объекта в (л -1)-й точке; oL- логическая переменная, опреде- лякяцая количество тактов работы устройстьа;П - количество предсказаний. Устройство работает следующим образом. Первые два цикла работы являются предварительными ((Л 2). . Первый цикл работы осуществляется в один такт (сС l), а именно: текущее значение контролируемого параметра у через №1ход блока 1 через блок 2 записывается в ячейку памяти блока 5 хранения m , одновременно с этим значение п с выхода блока 5 через блок 2 поступает на вход блока 10, с выхода которого, увеличенные на единицу, через блок 2 записываются в блок 5 хранения значения п и оС . В следукнцем цикле блок 3 управления в соответствии с условием Л 2 организует работу в два такта, В первом такте текуша значение параметра у , а такйсе величины, хранящиеся в блоке 5 (у ,т ) через блок 2 поступают на блок 8, Аналогично на блок 9 поступают значения у и п Блок 9 через блок 2 соединяется с блоком оперативной памяти 4, куда записывается вычисленное значение прогноза определяющего параметра в ( и +1)-й точке: У«.ГУп4(2-У„- „,,-Оп). Одновременно с этим в блоке 1О производится увеличение предисторву п и значения логической переменной сС на единицу и запись новых значений п и oL в блок 5 внешней памяги. Во втором такте производится аналогичное вычисление значения нового парного момента Ti : и производится запись ранее полученного значения прогноза у , в блок внешнеб памяти 5. Третий и последующий онклы работы устройства (.з) являются основными и производятся в три такта, при этом два первых такта аналогичны ранее описанны в третьем же такте производатся илчноление точности предсказания параметра (и ), при этом на вход блока 8 через блок 2 поступают с блока 5 значения и производится вычисление рассогласования текущего значения Сэ усредненным б по формуле: fА .2 2 Л()-б„,,. Одновременно в блоке 1О производится уменьшение предистории на 2 единицы. Полученное значение (л -2), а также рассогласование Л и предыдушее зна чение б, поступают соответственно с блоков 10, 8 и 5 через блок 2 на входы блока 9, в результате чего илчнспяз ся параметр П Л ГУ„-У«)-.Ь характеризукший точность параметра в п -и точке. Текущее значение контролируемого параметра у , Шэ1 численное значевие точности прогноза d , а также ранее определенное значение прогноза у через блок 2 поступают на вход блока 6, в котором производится вычисление вероятности J) выхода из строя контроли руемых объектов: Г Г (Ут1-У)Ь Ч г г 2±11У1Ь где допустимое значение определяю шего параметра контролируемого объекта измеренное значение определя1 « шего параметра в п -и точке; у - предсказанное значение опреде ляюшего параметра в (п +1)-й точке; Об 6„ - точность (дисперсия) предсказания определяющего параметра вп-й точке. Результат вычисления фиксируется пифропечатаюишм устройством блока 7, Одновременно с этим количество предсказаний Л в блоке 9 увеличивается на едвнипу и записывается через блок 2 в блок 5 внешней памяти, а значение прогно за с блока 4 оперативной памяти перепясывается в блок S. Введение в устройство блоков вычисления рассогласования и рекуррентного Haчисления параметра позволяет упростить схему реализации устройства, а также уменьшить время работы устройства. Формула изобретения Устройство для контроля параметров, содержащее блок коммутации контролируюмых объектов, входы которого подключены к соответствующим входам устройства, а выход - к первому входу блока коммутации, вторым входом соединенного с выходом блока оперативной памяти и первым входом блока нешней памяти, группа выходов которого подключена к первой группе входов блока коммутации, пёрЫ51Й и второй выходы которого соответственно соединены со входом блока оперативной памяти и входом блока управления, подключенного первым и вторым выходами соответственно к управляющим входам блока коммутации и блока внешней памяти, блок регистрации, соединен- ный входом с выходом блока вычисления интеграла вероятностей, отличающееся тем, что, с цеЯью повышения быстродействия устройства, в него введены блок суммирования, блок вычисления рассогласования и блок исчисления значения параметра, причем блок суммирования входом и выходом подключен соответственно к третьему выходу и третьему входу блока коммутации, а упра&ляющим входом - К третьему ылходу блока управление, вторая группа входов в первая группа выходов блока хоммутавин подключены соответственно к группам вы- ходов и входов блока вычисления рассогласования, группы входов и выходов блоха вычисления значения параметра соединены соответственно со второй группой выходов и третьей группой входов блока коммутации, третья группа выходов которого соединена с группой входов блока вычисления интеграла пероягностей, четвертый, пятый, шестой и седьмой выходы блока коммутации подключены соответственно ко второму, третьему, четвертому и пятому входам блока внешней памяти.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 245454, кл. G 06 F 15/46, 1966.
2.Авторское свидетельство СССР № 386399, кл. G 06 F 15/46, 197О.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров | 1979 |
|
SU911540A2 |
| Устройство для контроля пара-METPOB | 1978 |
|
SU798870A1 |
| Устройство для контроля параметров | 1978 |
|
SU744614A2 |
| УСТРОЙСТВО для ПРОФИЛАКТИЧЕСКОЙ ДИАГНОСТИКИ | 1973 |
|
SU386399A1 |
| Устройство для прогнозирования времени отказа объектов | 1974 |
|
SU566251A1 |
| Интегрирующая вычислительная структура | 1981 |
|
SU1257672A1 |
| Дифференцирующе-сглаживающее устройство | 1975 |
|
SU610115A1 |
| Прогнозирующее вычислительное устройство | 1973 |
|
SU479118A1 |
| Устройство для контроля системы управления | 1981 |
|
SU1003029A2 |
| Устройство для контроля технических объектов | 1977 |
|
SU734726A1 |
