(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров | 1979 |
|
SU911540A2 |
| Устройство для контроля пара-METPOB | 1978 |
|
SU798870A1 |
| Устройство для контроля параметров | 1977 |
|
SU657440A1 |
| Прогнозирующее вычислительное устройство | 1973 |
|
SU479118A1 |
| УСТРОЙСТВО для ПРОФИЛАКТИЧЕСКОЙ ДИАГНОСТИКИ | 1973 |
|
SU386399A1 |
| Цифровой нерекурсивный фильтр | 1985 |
|
SU1352622A1 |
| Устройство для прогнозирования времени отказа объектов | 1974 |
|
SU566251A1 |
| Устройство для контроля технических объектов | 1977 |
|
SU734726A1 |
| НЕЙРОПРОЦЕССОР, УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ НАСЫЩЕНИЯ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И СУММАТОР | 1998 |
|
RU2131145C1 |
| Цифровой нерекурсивный фильтр нечетного порядка | 1985 |
|
SU1314445A1 |
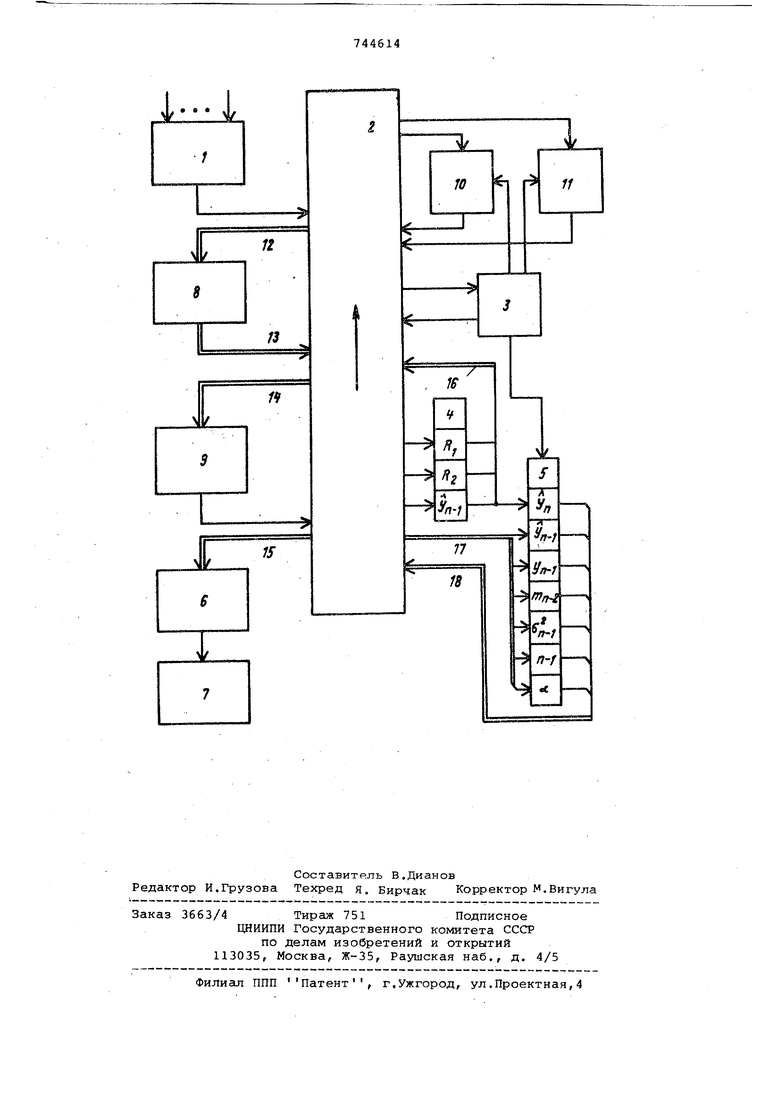
Изобретение предназначено для прогнозирования наступления аварийных режимов контролируемых объектов, относится к области автоматики и вычислительной техники и является усовершенствованием известного устройст ва, описанного в авт.ев, t 657440, В основном изобретении по авт.св. № 657440 описано устройство для конт роля, предназначенное для использования в автоматизированных системах централизованного контроля и обработки информации. Это устройство содержит блок коммутации, подключенный к блоку коммутации контролируемых объектов, блоку вычисления рассогласования, блоку вычисления значе ния параметра, блоку оперативной памяти, через блок вычисления интервала вероятностей к блоку регистрации и через блок управления к блоку внешней памяти и блоку суммирования, соединенным с блоком коммутации непосредственно 1, Недостатком данного устройства является малая точность, что снижает его использование для ряда специфических производств,например, при про нозировании аварийных .ситуаций потенциально опасных технологических процессов химических производств, Цель изобретения - повышение точости устройства. Это достигается тем, что оно снабжено управляемым блоком умножения, информационный вход и выход,которого подсоединены к блоку коммутации, а управляемый вход - к одному из. выходов блока управления. На чертеже представлена функциональная схема устройства. Она содержит блок 1 коммутации контролируемых объектов, блок 2 коммутации, осуществляющий функцию связи блоков устройства, блок 3 управления, управляющий работой устройства, блок 4 оперативной памяти, предназначенный для временного хранения результатов обработанной информации, блок 5 внешней памяти, служащий для хранения предыстории контролируемых объектов, блок 6 вы гисленйя интеграла вероятностей, б.пок 7 регистрации, блок 8 вычисления рассогласования, блок 9 вычисления значения параметра, блок 10 суммирования и управляемый блок 11 умножения. Позициями 12-18 обозначены входные и выходные шины соответствующих блоков устройства. В устройстве блок 8 имеет два вх да (),, Х) и три выхода (2,2,, Zj и реализует следующие соотношения: W.,z, , Блок 9, реализующий рекуррентное вычисление параметра, имеет четыре входа (у., Х , ,е и один выход () и реализует следующее соотношение: . V у ,VV Блок 10 в зависимости от управле ния производит суммирование входной величины либо с .величиной (-2), либо (+1). Блок 11 в зависимости от управле ния производит умножение поступающей на его вход величины либо на б, либо на 9. Перед началом работы в блок 5 заносятся следующие величины: У yn-.-V. n-a- п-л-О где у, v - предсказанное значение определяющего параметра вп -и и (п - 1)-и точках соответственно; УП - действительное значение опре деляющего параметра в (п - 1)-й точ ке;гп, , 5п числовые величины, определяющие математическое ожидание и дисперсию многомерной случайн функции состояния контролируемого объекта в (п - 2)-й и (п -1)-й точках соответственно; (Х - логическая переменная, определяющая количество тактов работы устройства; п - количество предсказаний. Работает предлагаемое устройство в следующей последовательности, при этом первые три цикла являются пред варительными. Первый цикл работы ( с. 1) осуществляется в ойин такт, а именно: текущее значение контролируемого параметра УП через выход блока 1 через блок 2 записывается в ячейку блока 5 храненият ; одновременно с этим значение ok с выхода блока 5 через блок 2 поступает на.вход блока 10, с выхода которого увеличенно на единицу через блок 2 записываетс в блок 5 хранения dL. Во втором цикле (ci. 2) блок 3 ор ганизует работу устройства в два так та, В первом такте текущее значение контролируемого параметра У, записывается через выход ,-блока 1 через бл 2 в ячейку памяти блока 5 хранения УП. Одновременно с этим происходи аналогично описанному в первом цикле изменение содержимого ячейки хра Нения bk в блоке 5. Во втором такте производится изменение на единицу содержимого ячей ки блока 5, где хранится значение предыстории, уменьшенное на единицу ( о - 1 ). В следующем цикле {d 3) блок 3 организует работу устройства в три такта. В первом такте величины (f , Vp,,), Хранящиеся в блоке 5, через блок 2 поступают на блок 9, выход которого через блок 2. подсоединяется к первому входу блока 8, второй вход которого также через блок 2 подсоединяется к выходу ячейки блока 5, хранящей значение у, Первый выход блока 8 подсоединяется через блок 2 ко входу блока 11, В котором в сс5ответствии с управляющим сигналом с блока 3 производится умножение входно.й величины на коэффициент +6; выход блока 11 через блок 2 соединяется с ячейкой блока 4, куда записывается вычисленное значение( Во втором такте производится вычисление значения нового первого момента m по формула п- . ( Одновременно с этим значения у „ и УП- , хранящиеся в блоке 5, через блок 2 поступают на блок 8, третий выход которого через блок 2 соединяется со второй ячейкой блока 4, куда записывается значение ., в блоке 10 при этом производятся увеличение предыстории на единицу и запись нового значения (п - 1) в соответствующую ячейку блока 5. В третьем такте текущее значение параметра УП , а также предыдущее значение ,) / хранящееся в блоке 5, через блок 2 поступает на блок 8, первый выход которого через блок 2 соединяется со входом блока 11, который в соответствии с управляющим сигналом, выдаваемым блоком 3, производит умножение входной величины на коэффициент +9. . Выход блока 11 через блок 2 соединяется с одним из входов блока 9, остальные входы которого через блок 2 соединяются с ячейками блока 4, хранящими значения R и R, а также с ячейкой блока 5, хранящей значение п , При этом.У --R-vMQx(.: Одновременно с этим содержимое ячейки Ур записывается в ячейку . блока 5. Четвертый и последующие циклы работы устройства (сз1 4) являются основными и производятся в четыре такта, из них первые три аналогичны описанным, а в четвертом такте производится вычисление точности предсказания бр /при этом на вход блока 8 через блок 2 поступают с блока 5 значения УГ,, а также . текущее значение контролируемого параметра у и производится вычисление рассогласования Д . Д (УП-УП). . Одновременно с этим в блоке 10 производится уменьшение предыстории на 2 единицы. Полученное значение п -. 2, а также рассогласование А и предьщушее значение - поступают соответствен но с блоков 10, 8 и 5 через блок 2 на входы блока -9, в результате чего вычисляется параметр 6 ci.( xapaктepизvющий точность параметра в п-й точке. Текущее значение контролируемого параметра у г, , вычисленное значение точности прогно за йД, а также ранее определенное значение прогноза УП+/ через блок 2 поступают на вход блока б, в которо производится вычисление вероятности выхода из строя контролируемых объектов9оп г Y -v тл-) L S Н J УП r( 5expU: n±l dy L 16 J где p - вероятность выхода контролируемого параметра из зоны допусков; Qon допустимое значение опре деляющего параметра конт ролируемого объекта; Vf - измеренное значение опре деляющего параметра в п-й точке; у. - предсказанное значение, определяющего параметра в (П + l)-ift точке; г точность (дисперсия) предсказания определяющего параметра в :П-й точке. Результат вычисления регистрируется блоком 7. Одновременно с этим. текущее.значение УО , а также значение прогноза с блока 4 переписывается в соответствующие ячейки блок а 5. Введение в устройство управляемого блока умножения позволяет повысить точность контроля определяющего параметра, Все блоки, составляющие данное устройство, могут быть реализованы на базе известных элементов и узлов цифроаналоговых вычислительных машин. Формула изобретения Устройство для контроля параметров по авт.св. № 657440, о т л и чающееся тем, что, с целью повышения точности устройства, оно снабжено управляемым блоком умножения, информационный вход и выход которого подсоединены к блоку коммутации, а управляемый вход - к одному из выходов блока управления. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 657440, 1сЛ. G 06. F 15/46, 1977,
