1
Изобретение относится к грузозахватньом устройствам, использующим вакуум для захвата и удержания груза при его подъеме и транспортировке.
Известен вакуумный захват, содержащий вакуумную головку, регулирующий клапан, механизм наклона пэловки и механизм подъема, выполненный в виде рычагов l. .
Известна также вакуумная головка, содержащая корпус с размещенным в нем поршнем, на штоке которого в верхней части закреплена грузовая серьга 2 .
Указанные вакуумные захваты не обеспечивают достаточной надежности удержания груза, так как удерживающее усилие в них пропорционально ходу поршня.
Наиболее близким по технической сущности к описываемому является ручной вакуумный захват, содержащий корпус с выступами, выполненную в корпусе камеру разрежения с установленным в ней поршнем со штоком и шарнирно закрепленные на корпусе рычаги, снабжен.ные подпружиненными защелками и рукоятками З .
2
Недостатком известного захвата является значительная затрата времени на операцию захвата и освобождения груза.
Целью изобретения является ускорение выполнения операций по захвату груза.
Поставленная цель достигается тем, что рычаги выполнены полыми и внутри них установлены подпружиненные тяги, один конец каждой из-которых соединен с подпружиненной защелкой, а второй с рукояткой, причем на штоке выполнены зубья, а на конце каждого рычага жестко закреплена шестерня, зубья которой находятся в зацеплении с зубьями штока.
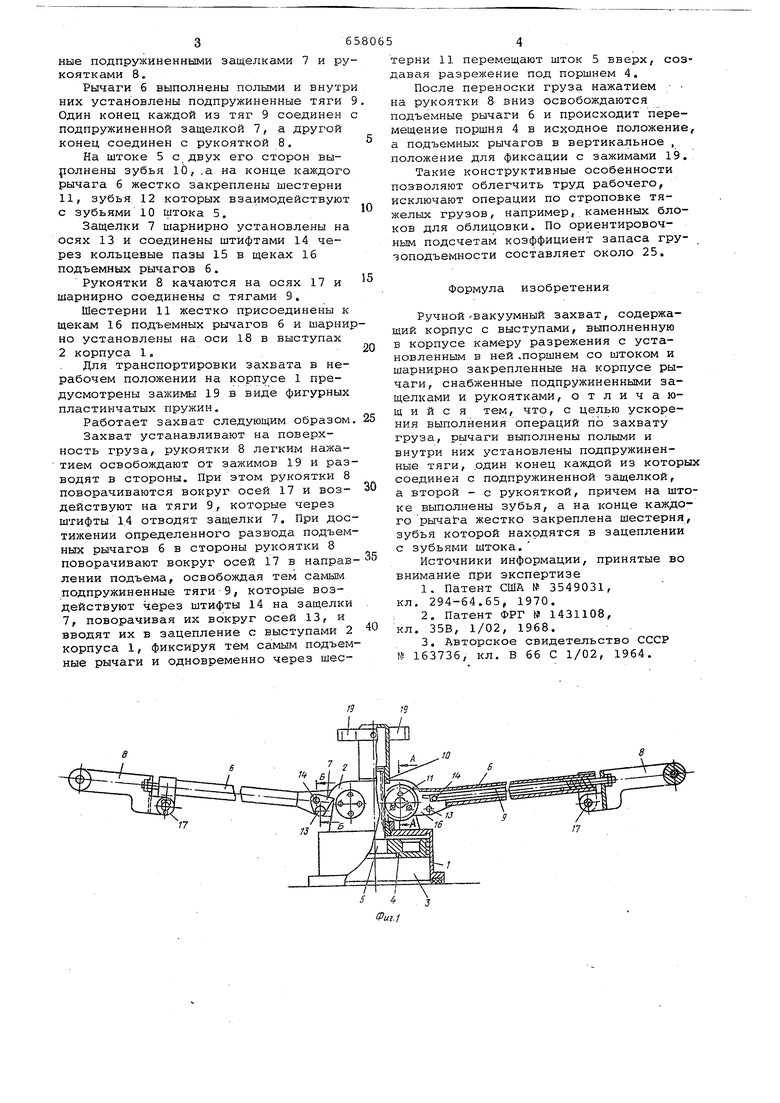
Сущность изобретения поясняется чертежом, где на фиг. 1 изображен общий вид ручного вакуумного захвата; на фиг. 2 - вид захвата сверху; на фиг. 3 - сечение А-А на фиг. 1, на фиг. 4 - сечение Б-Б на фиг. 1.
Захват содержит корпус 1 с выступами 2. В корпусе выполнена камера разряжения 3 с установленным в ней поршнем 4 со штоком 5, а на корпусе шарнирно закреплены рычаги 6, снабженые подпружиненными защелками 7 и ру коятками 8. Рычаги б выполнены полыми и внутр них установлены подпружиненные тяги Один конец каждой из тяг 9 соединен подпружиненной защелкой 7, а другой конец соединен с рукояткой 8. На штоке 5 с двух его сторон выролнены зубья 10, .а на конце каждого рычага 6 жестко закреплены шестерни 11, зубья. 12 которых взаимодействуют с зубьями 10 штока 5. Защелки 7 шарнирно установлены на осях 13 и соединены штифтами 14 через кольцевые пазы 15 в щеках 16 подъемных рычагов 6. Рукоятки 8 качаются на осях 17 и шарнирно соединены с тягами 9. Шестерни 11 жестко присоединены к щекам 16 подъемных рычагов б и шарнир но установлены на оси 18 в выступах 2 корпуса 1, Для транспортировки захвата в нерабочем положении на корпусе 1 предусмотрены зажимы 19 в виде фигурных пластинчатых пружин. Работает захват следующим образом Захват устанавливают на поверхность груза, рукоятки 8 легким нажатием освобождают от зажимов 19 и раз водят в стороны. При этом рукоятки 8 поворачиваются вокруг осей 17 и воздействуют на тяги 9, которые через штифты 1,4 отводят защелки 1, При дос тижении определенного развода подъем ных рычагов б в стороны рукоятки 8 поворачивают вокруг осей 17 в направ лении подъема, освобождая тем самым подпружиненные тяги-9, которые воздействуют через штифты 14 на защелки 7, поворачивая их вокруг осей 13, и вводят их в зацепление с выступами 2 корпуса 1, фиксируя тем самым подъем ные рычаги и одновременно через шестерни 11 перемещают шток 5 вверх, создавая разрежение под поршнем 4, После переноски груза нажатием на рукоятки 8 вниз освобождаются подъемные рычаги б и происходит перемещение поршня 4 в исходное положение, а подъемных рычагов в вертикальное , положение для фиксации с зажимами 19. Такие конструктивные особенности поз-воляют облегчить труд рабочего, исключают операции по строповке тяжелых грузов, например,,каменных блоков для облицовки. По ориентировочным подсчетам коэффициент запаса грузоподъемности составляет около 25. Формула изобретения Ручной-вакуумный захват, содержащий корпус с выступами, выполненную в корпусе камеру разрежения с установленным в ней .поршнем со штоком и шарнирно закрепленные на корпусе рычаги, снабженные подпружиненными защелками и рукоятками, отличающийся тем, что, с целью ускорения выполнения операций по захвату груза, рычаги выполнены полыми и внутри них установлены подпружиненные тяги, .один конец каждой из которых соединен с подпружиненной защелкой, а второй - с рукояткой, причем на штоке выполнены зубья, а на конце каждого рычаЬа жестко закреплена шестерня, зубья которой находятся в зацеплении с зубьями штока. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3549031, кл. 294-64.65, 1970. 2.Патент ФРГ № 1431108, кл. 35В, 1/02, 1968. 3.Авторское свидетельство СССР № 163736; кл. В 66 С 1/02, 1964.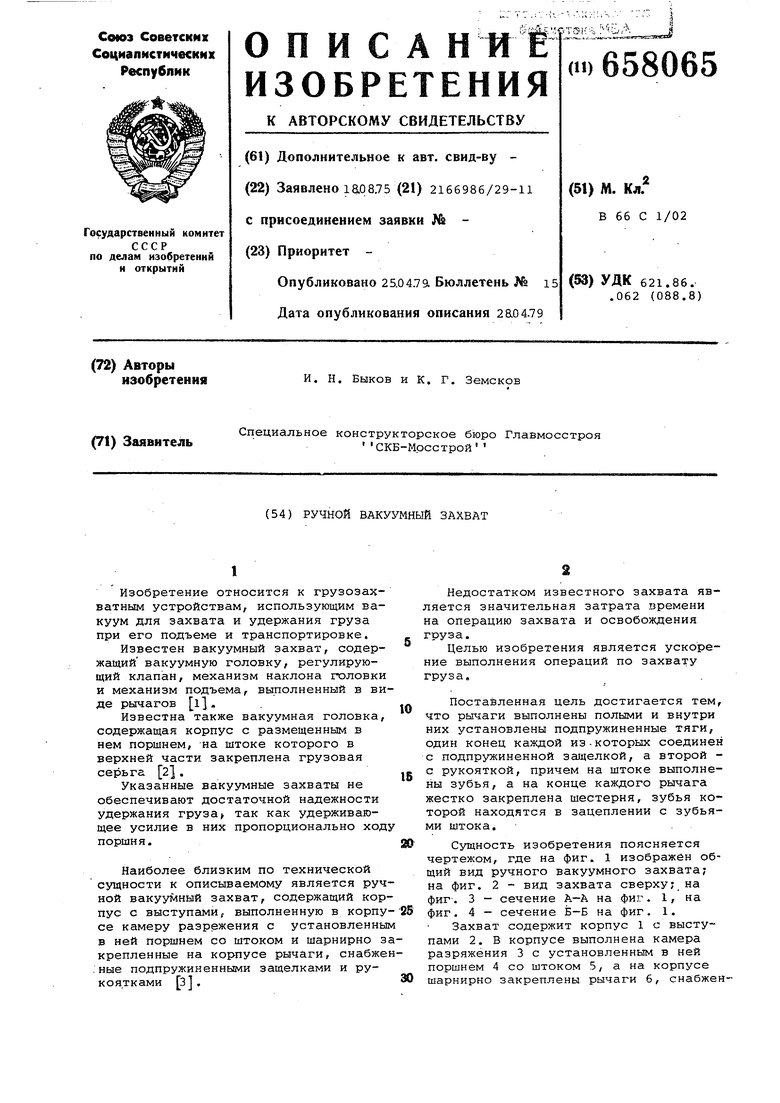
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для растаривания емкостей | 1982 |
|
SU1115973A1 |
| Погрузочно-разгрузочное окно шахты вертикального многокабинного конвейера | 1980 |
|
SU926206A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| Пневматический пресс для влажно-тепловой обработки деталей одежды | 1955 |
|
SU109595A1 |
| Грузозахватное устройство | 1990 |
|
SU1801921A1 |
| Ударный инструмент | 1987 |
|
SU1500441A1 |
| Вакуумная установка для контроляКАРбюРАТОРА | 1978 |
|
SU813153A2 |
| РУЧНОЙ ВАКУУМНЫЙ ЗАХВАТ | 1972 |
|
SU424801A1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| РУЧНОЙ ПРИВОД ВРАЩАЮЩЕГОСЯ ТРАНСПОРТЕРА | 1999 |
|
RU2165572C2 |
Фщ.З
в-Б
9 ЛЬ
i
9игЛ
