1
Изобретение относится к грузозахватным устройствам и может быть использовано для выполнения подъемно-транспортных операций с грузами, имеющими, преимущественно, гладкую поверхность, например, при подъеме, трапспортировании и установке стеклоконструкции.
Известны ручные вакуумные захваты, содержащие корпус с рукояткой и вакуумнообразующие камеры с диафрагмами, закрепленными на подпружиненных приводных щтоках. Однако такие захваты требуют приложения значительного ручного усилия, а также продолжительного времени на захват и освобождение груза за счет включения рычажно-эксцентрикового устройства каждой камеры в отдельности.
Для сокращения времени и уменьщения усилия для привода диафрагмы в пазах щтоков установлены разжимные клинья, соедипенные шарнирно с равноплечими рычагами, которые другими своими плечами шарнирно прикреплены к планке при помощи пальцев, установленных в вертикальных пазах корпуса с возможностью перемещения плапки отпосительно рукояти и клиньев в пазах штоко для передвижепия последних и деформации диафрагм. Кроме того, в корпусе па осях установлены выводные собачки для взаимодействия с равноплечими рычагами при выведе2
НИИ их из нижнего крайнего положения а с целью уменьшения сопротивлення переменкепню клиньев. Для уменьщения сопротивления перемещению клиньев на щтоках и в корпусе установлены ролики, взаимодействующие с клиньями при их перемещепнп.
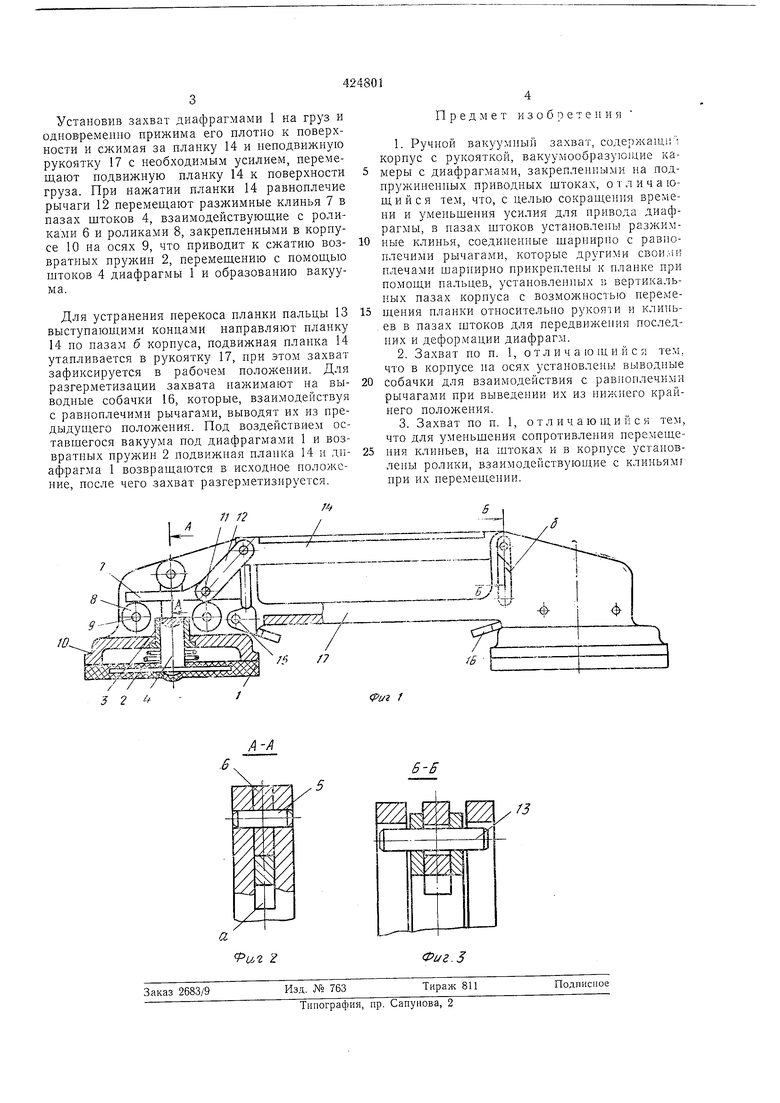
На фиг. 1 схематически изображен ручной вакуумный захват, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фпг. 3 - разрез по Б-Б на фиг. 1.
Вакуумный захват состоит нз двух диафрагм 1, одновременно служащих камерами разрежения, возвратных 2, направляющих втулок 3, в которых перемещаются щтокп 4, связанные с днафрагмамп. На другнх концах щтоков в пазах а с помощью пальцев 5 закреплены врап1,ающиеся ролики 6, находящиеся в силовом взаимодействии с разл имными клппьямп 7, которые опираются на поддерживающие ролпки 8, закрепленные на осях 9 в корпусе 10 захвата. Разжи.мные клинья 7 соедпнс 1Ы пальцами 11 с равноплечими рычагами 12, которые другими своп: И плечами соединены с номопдью пальцев 13 с планкой 14. Выступающие концы пальцев перемещаются Б вертикальных пазах б корпуса захвата. На корпусе размещены па осях 15 выводные собачки 16. К корпусу жестко прикреплена рукоятка 17.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАКУУМНЫЙ ЗАХВАТ | 1970 |
|
SU287269A1 |
| Автоматическое вакуумное захватное устройство | 1976 |
|
SU616219A1 |
| Захватное устройство для листовых материалов | 1983 |
|
SU1139693A1 |
| Устройство для сборки тонкостенных изделий | 1974 |
|
SU524654A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Предохранительное приспособление для автоматического выключения пресса | 1935 |
|
SU49844A1 |
| Устройство для автоматической подачи заготовок и выдачи готовых задников к машине для формования задников | 1955 |
|
SU107378A1 |
| Вакуумная грузозахватная траверса | 1979 |
|
SU903275A1 |
| Широкозахватное почвообрабатывающее орудие | 1982 |
|
SU1042636A1 |
| Захватное устройство | 1988 |
|
SU1625685A2 |
