ный с блоком приема информации, накопитель циклов и накопители времени работы под нагрузкой и времени холостого хода 3.
Такое устройство не позволяет получать отдельно показатели основной работы машины, направленной на передвижение земляной мяссы в отвал или погрузку ее в транспорт, а выдает эти показатели просуммированными с показателями вспомогательной работы, связанной с подготовкой забоя, а также с ходовыми передвижениями машины, так как колебания платформы и рабочего оборудования возникают в равной степени, как при выполнении основной работы, так и вспомогательной.
Кроме того, необходимость хранения на подвижном объекте трех показателей и передачи их на диспетчерский пункт связана со сложностью и громоздкостью аппаратурного решения, а следовательно и со снижением надежности устройства и достоверности контрольной информации.
Для повышения точности контроля предложенное устройство снабжено накопителем времени простоя, блоком анализа информации, блоком сравнения, блоком задания уровня и датчиком поворота, соединенным через элемент задержки и усилитель со вторым входом схемы совпадения, выход которой подключен к счетчику, соединенному выходом со входом блока кодирования и передачи информации, а измеритель мощности через усилитель соединен с одним из входов блока сравнения, второй вход которого подключен к блоку задания уровня, а выход - со входом инвертора и с одним из входов триггера, соединенным вторым входом с выходом инвертора, причем вход блока анализа информации подключен к выходу блока приема информации, а выход - ко входам накопителя циклов и накопителей времени работы под нагрузкой, времени холостого хода и времени простоя.
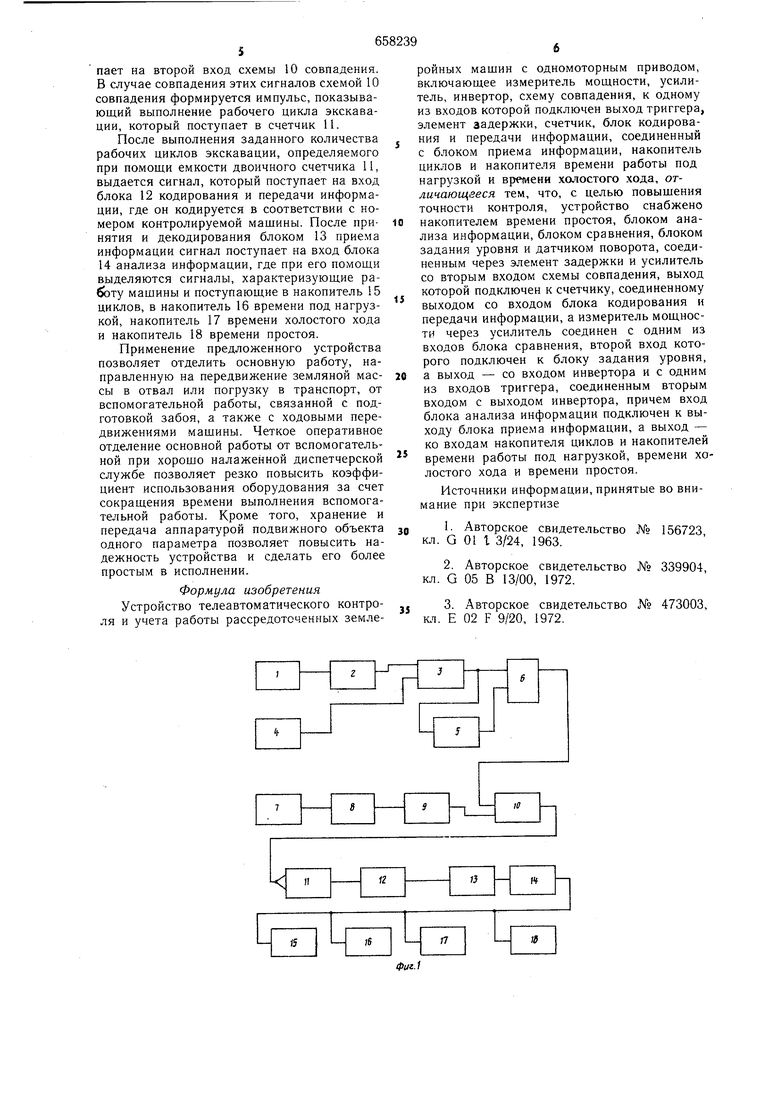
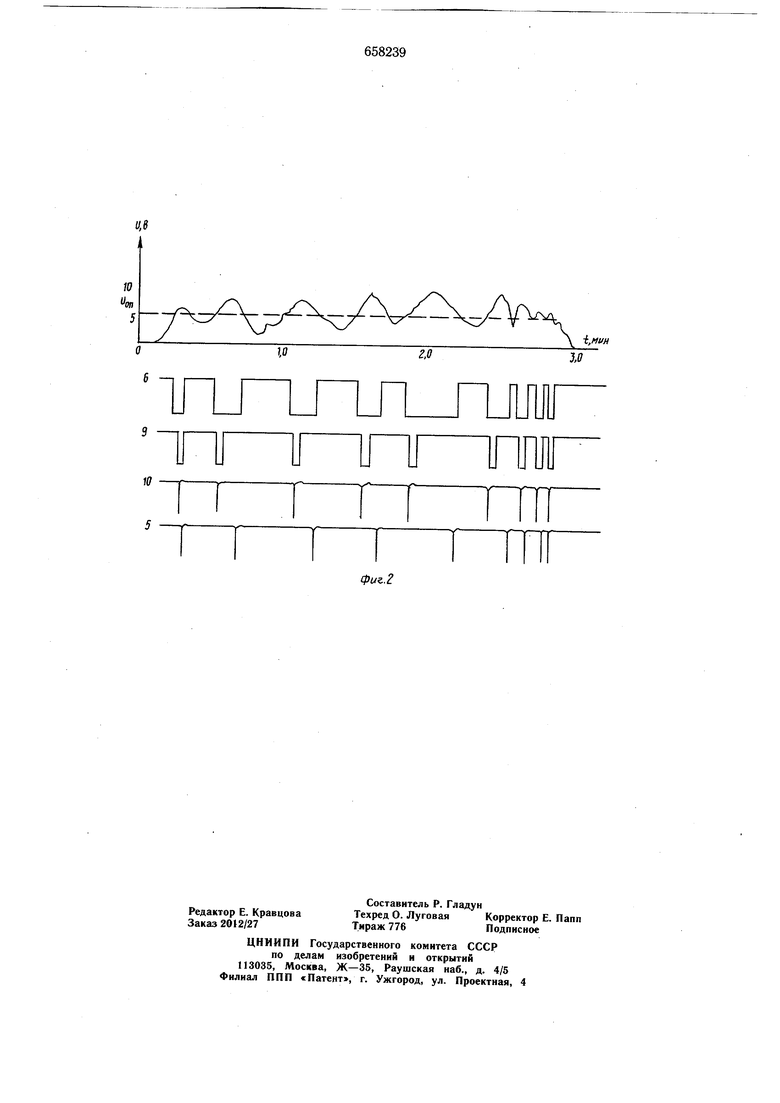
На фиг. 1 приведена структурная схема предложенного устройства; на фиг. 2 - эпюра работы устройства.
Устройство телеавтоматического контроля и учета работы рассредоточенных землеройных машин с одномоторным приводом содержит измеритель 1 мощности, усилитель 2, схему 3 сравнения, блок 4 задания уровня, инвертор 5, триггер 6, датчик 7 поворота, элемент 8 задержки, усилитель 9, схему 10 совпадения, счетчик 11, блок 12 кодирования и передачи информации, блок 13 приема информации, блок 14 анализа информации, накопитель 15 циклов, накопитель 16 времени работы под нагрузкой, накопитель 17 времени холостого хода, накопитель 18 времени простоя.
Выход измерителя 1 мощности, предназначенного для непрерывного определения текущего значения нагрузки на двигателе и задержки его на заданный промежуток
времени, соединен со входом усилителя 2, выход которого подключен к одному из входов схемы 3 сравнения, предназначенной для сравнения величины сигнала нагрузки с величиной сигнала, поступающего с блока , 4 задания уровня, входом подключенного ко второму входу схемы 3 сравнения. Выход схемы 3 сравнения подключен к одному из входов триггера 6, а через инвертор 5 - ко второму входу триггера 6. Выход триггера 6, предназначенного для фиксации уровня сигнала большего или равного заданному, соединен со входом схемы 10 совпадения. Выход датчика 7 поворота, выполненного в виде датчика давления через элемент задержки, предназначенной для исключения сигнала поворота на угол меньше заданного,
и усилитель 9 соединен со вторым входом схемы 10 совпадения, предназначенной для выработки сигнала, определяющего выполнение цикла экскавации. Выход схемы 10 совпадения соединен со входом счетчика 11.
0 Выход последнего соединен со входом блока
12кодирования и передачи информации, своим выходом связанного со входом блока
13приема информации, устанавливаемого на диспетчерском пункте, выход которого подключен ко входу блока 14 анализа ин формации, предназначенного для формирования временных показателей работы машины. Выход блока 14 анализа информации соединен соответственно со входами накопителей циклов, времени работы под нагрузкой, времени холостого хода, времени простоя.
Устройство работает следующим образом. Сигнал с измерителя 1 .мощности, пропорциональный нагрузке, возникающей на валу приводного двигателя, усиливается при
5 помощи усилителя 2 (см. фиг. 2). После усиления усилителем 2 этот сигнал поступает на вход схемы 3 сравнения, на второй вход которой поступает сигнал уровнем, сформированным блоко.м 4 задания уровня сигнала. Если амплитуда сигнала, поступающего с усилители 2, равна или больше амплитуды сигнала, снимаемого с блока 4 задания уровня сигнала, схемой 3 сравнения формируется сигнал, устанавливающий триггер в единичное состояние.
Если амплитуда сигнала, поступающего с усилителя 2, меньше амплитуды сигнала, снимаемого с блока 4 задания уровня, схемой 3 сравнения и инвертором 5 формируетO ся сигнал, устанавливающий триггер 6 в нулевое состояние. Выход триггера 6 подключен ко входу схемы 10 совпадения, на второй вход которой поступает сигнал поворота платформы, сформированный при помощи датчика 7 поворота и элемента 8
задержки, позволяющего проинтегрировать и задержать сигнал на время т, определяемое временем поворота стрелы на угол, например, не менее 10° и усилителя 9, поступает на второй вход схемы 10 совпадения. В случае совпадения этих сигналов схемой 10 совпадения формируется импульс, показывающий выполнение рабочего цикла экскавации, который поступает в счетчик 11.
После выполнения заданного количества рабочих циклов экскавации, определяемого при помощи емкости двоичного счетчика 11, выдается сигнал, который поступает на вход блока 12 кодирования и передачи информации, где он кодируется в соответствии с номером контролируемой мащины. После принятия и декодирования блоком 13 приема информации сигнал поступает на вход блока 14 анализа информации, где при его помощи выделяются сигналы, характеризующие работу мащины и поступающие в накопитель 15 циклов, в накопитель 16 времени под нагрузкой, накопитель 17 времени холостого хода и накопитель 18 времени простоя.
Применение предложенного устройства позволяет отделить основную работу, направленную на передвижение земляной массы в отвал или погрузку в транспорт, от вспомогательной работы, связанной с подготовкой забоя, а также с ходовыми передвижениями мащины. Четкое оперативное отделение основной работы от вспомогательной при хорощо налаженной диспетчерской службе позволяет резко повысить коэффициент использования оборудования за счет сокращения времени выполнения вспомогательной работы. Кроме того, хранение и передача аппаратурой подвижного объекта одного параметра позволяет повысить надежность устройства и сделать его более простым в исполнении.
Формула изобретения Устройство телеавтоматического контроля и учета работы рассредоточенных землеройных мащин с одномоторным приводом, включающее измеритель мощности, усилитель, инвертор, схему совпадения, к одному из входов которой подключен выход триггера, элемент задержки, счетчик, блок кодирования и передачи информации, соединенный с блоком приема информации, накопитель циклов и накопителя времени работы под нагрузкой и врп1ени хачостого хода, отличающееся тем, что, с целью повыщения точности контроля, устройство снабжено
накопителем времени простоя, блоком анализа информации, блоком сравнения, блоком задания уровня и датчиком поворота, соединенным через элемент задержки и усилитель со вторым входом схемы совпадения, выход которой подключен к счетчику, соединенному выходом со входом блока кодирования и передачи информации, а измеритель мощности через усилитель соединен с одним из входов блока сравнения, второй вход которого подключен к блоку задания уровня,
а выход - со входом инвертора и с одним из входов триггера, соединенным вторым входом с выходом инвертора, причем вход блока анализа информации подключен к выходу блока приема информации, а выход - ко входам накопителя циклов и накопителей времени работы под нагрузкой, времени холостого хода и времени простоя.
Источники информации, принятые во внимание при экспертизе
1- Авторское свидетельство оЧо 156723
кл. G 01 г 3/24, 1963.
2. Авторское свидетельство № 339904 кл. G 05 В 13/00, 1972.
3. Авторское свидетельство оЧо 473003 кл. Е 02 F 9/20, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство оперативного дистанционного контроля работы землеройных машин с одномоторным приводом | 1972 |
|
SU473003A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Устройство для контроля и учета работы землеройного оборудования | 1974 |
|
SU516076A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Устройство для телеконтроля и учета работы подвижных объектов | 1971 |
|
SU474834A1 |
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| СПОСОБ КОДИРОВАНИЯ ИНФОРМАЦИИ ОТРЕЗКАМИ ЛИНЕЙНЫХ РЕКУРРЕНТНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2014 |
|
RU2568320C1 |
| Устройство для контроля дефектов стальных канатов или лент подъемных механизмов | 1977 |
|
SU789723A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ УРОВНЕЙ ПОБОЧНЫХ КОЛЕБАНИЙ РАДИОПЕРЕДАТЧИКОВ | 1990 |
|
RU2033618C1 |
| Многоканальное устройство для программного управления автоматической линией изготовления многослойных керамических конденсаторов | 1985 |
|
SU1297013A1 |
10
Uon
