1
Изобретение относится к области вычислительной техники и может найти широкое применение в машиностроении при построении систем числового программного управления различным технологическим оборудованием.
Известно программное задающее устройство, содержащее последовательно соединенные блок управления, блок задания скорости, первый счетчик импульсов, коммутатор п второй счетчик импульсов 1.
Наиболее близким по технической супдности к предложенному техническому решению является устройство для программного управления приводами, содержащее последовательно соединенные блок управления, блок задания ирограммы, подключеиный к коммутатору, блок задания скорости, подключенный к первому счетчику импульсов, второй счетчик импульсов, подключенный к блоку управления и к блоку задания программы, блок сравнения, подключенный к блоку задания скорости и к первому счетчику импульсов 2.
Иедостатком известных устройств является низкое быстродействие, связанное с пересчетом всей ирограммы при изменении параметров обрабатываемой или коитролируемой поверхности детали. Обработка площади, например, механическое фрезерование вафель или ультразвуковой контроль листа, предусматривает программу, описывающую траекторию движения исполнительного органа.
Целью изобретения является повышение быстродействия устройства за счет автоматического формирования траектории движения исполнительного органа при малом объеме исходной информации.
Поетавленная цель достигается тем, что устройство содержит третий счетчик импульсов, триггер и логический блок, первый вход которого подключен к выходу блока управления, второй вход - к выходу триггера, третий вход - к соответствующему выходу блока задания программы и ко входу триггера, третий выход - к выходу блока задапия скорости и ко входу коммутатора, первый выход логического блока соединен с другим входом блока задания программы и с одним из входов коммутатора, второй выход - с первым входом третьего счетчика импульсов, второй вход которого подключен к выходу блока задания программы, первый выход третьего счетчика импульсов соединен с другим входом блока управления, а второй выход - с другим входом блока сравнения.
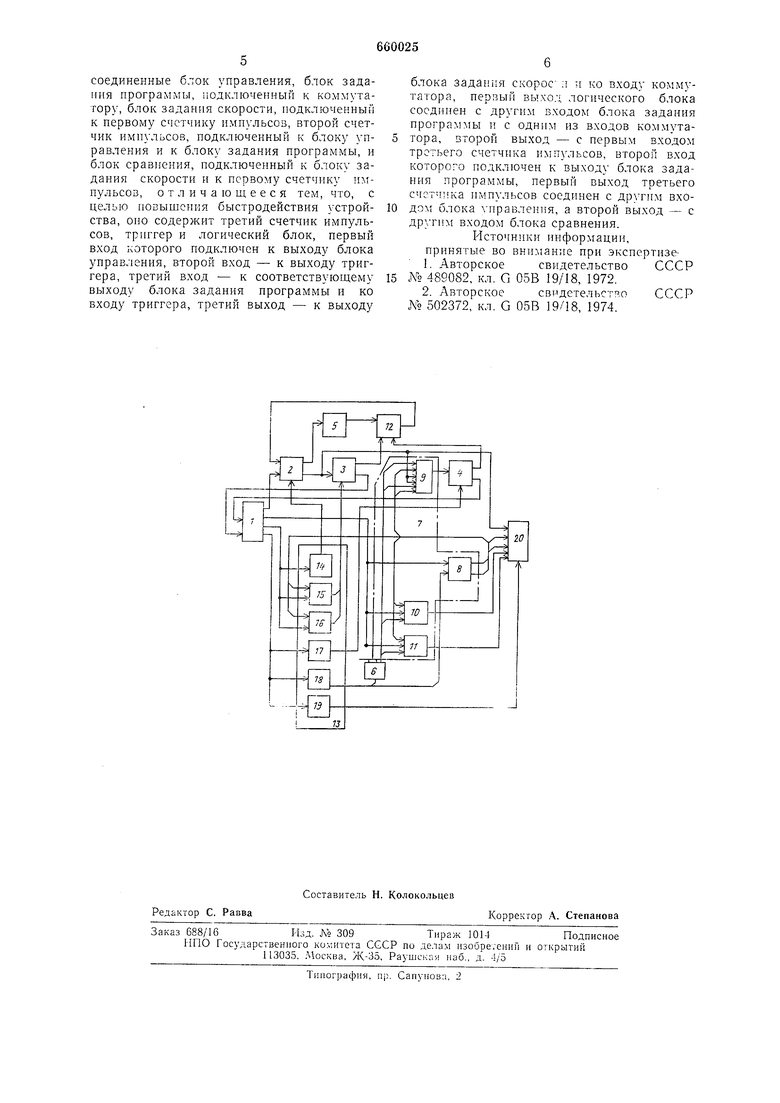
На чертеже приведена функциональная
схема устройства.
Устройство для программного управления приводами содержит блок управления 1, блок 2 задапия скорости, счетчпкп импульсов 3-5, триггер 6, логический блок 7, состоянии из триггера 8, элемента 2И- ИЛИ 9, и элементов И 10, 11, блок сравпения 12, блок задания нрограммы 13, состоящий из регистров 14-19, и коммутатор 20.
Работа устройства рассматривается на примере управления ультразвуковой установкой контроля дефектов листов и плит.
В регистре 14 блока задания программы 13 задается скорость движения нснолпительного органа, в регистрах 15, 16 - величина перемен1,ения и шаг сканирования, в регистре 17 - величина перемещения но координате сканирования, в регистре 18 указывается координата сканирования и координата, по которой производится первый нроход; в регистре 19 - начальные знаки движения.
Ири запуске устройства блок управления 1 производит подготовку устройства к отработке первого прохода.
По команде с выхода блока управления
1в счетчик импульсов 4 записывается перемещение, в триггер 6 записывается признак координаты сканирования, а триггер 8 логического блока 7 - признак начальной координаты, в коммутатор 20 - нанравление движения.
По команде с другого выхода блока унравления 1 в счетчик 3 импульсов 8 записывается перемещение, признак которого хранится в триггере логического блока 7. Блок задания скорости 2 но команде блока управления 1 производит плавное увеличение выходной частоты до величины, которая соответствует подаче записанной в регистре 14 блока задания программы 13.
Сигналы с первого выхода блока 2 задания скорости подаются на вход счетчика имнульсов 3, на вход коммутатора 5 и на вход логического блока 7, а со второго выхода - на вход счетчика имнульсов 5, который производит счет имнульсов, вырабатываемых блоком 2 задания скорости при разгоне. Блок сравнения 12 производит ностоянное сравнение нути разгона с остатком нути по отрабатываемой координате, который хранится в счетчике импульсов 3 и перед началом отработки равен исходному неремещению, а в процессе отработки уменьшается пропорционально количеству импульсов, поступающих на вход счетчика импульсов 3. Выходной коммутатор 20 направляет последовательность имнульсов по той координате, признак которой записан в триггере 8 логического блока 7.
В момент, когда остаток нути по отрабатываемой координате станет равным пути разгона, блок сравнения 12 выдает в блок
2задания скорости команду начала тормон ения, а когда остаток нути станет равным
н)лю, счетчик нмнульсов 3 вырабатывает сигнал конца отработки перемещения, который поступает па вход блока управления 1.
Блок управления 1 останав.шваег блока 2 задания скорости п производит иодготовку устройства к отрабогке перемещения по второй координате. Сигнал с выхода блока управления 1 проходит через один из элементов И 10, И логического блока 7 и ностунает на вход коммутатора 20, который нроизводит смену знака движения по отработанной координате. Кроме того, этот сигнал перебрасывает триггер 8 логического блока 7, на выходе которого устанавливается нотенциал второй координаты.
По команде с выхода блока управления 1 в счетчик импульсов 3 записывается величина шага, а по команде с другого выхода блока унравлення 1 запускается блок 2 задания скорости.
При отработке шага последовательность импульсов с первого выхода блока задания скорости 2 постуиает на вход коммутатора 20, который направляет их по второй координате, а через элемент 2И-ИЛИ 9 логического блока 7 - на вход счетчика 4, который формирует остаток нути но координате сканирования. Элемент 2И-ИЛИ 9 логического блока 7 открывается при сознадении признака координаты сканиро::.аи11я, занисанного в триггере 6, и еоответсгвующего признака в триггере 8 логического блока 7.
После отработки шага блок управления 1 нроизводит подготовк устройства к отработке иеремещепия по кервоп координате с обратным знаком движения. По координате сканирования смены знака движения не производится, так как элементы И 10, 11 логического блока 7 закрыты потенциалом с триггера 6.
Чередование обработки перемещений будет нродолжаться до тех нор, пока остаток пути по координате сканирования не станет равным нулю.
За время отработки носледнего шага в момент, когда остаток нути но координате сканирования станет равным пути разгона, блок сравнения 12 выдает команду торможения в блок 2 задания скорости.
После обнуления счетчика 4 делается нроход по нервой координате, после отработки которого блок управления 1 фор.мирует сигнал конца огработки кадра.
Автоматическое формирование проходов нри контроле нлон1,ади листов, плит и т. д. ведет к упрощению нодготовки програм.м, к значительпому сокращению объема программоносителя и, в конечном итоге, к повьпиению производительпоети обработки.
Форм } л а и 3 о б р е т е и и я
Устройство для программного управления приводами, содержащее последовательно
соединенные блок управления, блок задания программы, подключенный к коммутатору, блок задания скорости, подключенный к первому счетчику импульсов, второй счетчик импульсов, подключенный к блоку управления и к блоку задания программы, и блок сравнения, подключенный к блоку задания скорости и к первому счетчику пмпульсов, отличаюи1,ееся тем, что, с целью повышения быстродействия устройства, оио содержит третий счетчик импульсов, триггер и логический блок, первый вход которого подключен к выходу блока управления, второй вход - к выходу триггера, третий вход - к соответствующему выходу блока задания программы и ко входу триггера, третий выход - к выходу
блока заданля скорое л и ко входу коммутатора, первый выход логического блока соединен с другим входом блока задания программы н с одним из входов коммутатора, второй выход - с первым входом третьего счетчика импульсов, второй вход которого подключен к выходу блока задания программы, первый выход третьего счетчика имнульсов соединен с другим входом блока управления, а второй выход - с другим входом блока сравнения.
Источники информации, принятые во внимание при экспертизе1.Авторекое свидетельство СССР 489082, кл. G 05В 19/18, 1972.
2.Авторское свидетельстр.о СССР № 502372, кл. G 05В 19/18, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для цифрового программного управления станками | 1976 |
|
SU583407A1 |
| Устройство для программного управления | 1977 |
|
SU708306A1 |
| Устройство для программного управления приводами | 1975 |
|
SU694836A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Следящая система | 1975 |
|
SU585474A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
.- J
