1
Изобретение относится к области вычислительной техники, в частности к системам . цифрового программного управления, и может быть использовано для управления оборудованием по программе.
Известно устройство для программного управления оборудованием, содержащее блоки иамят и ввода программы, подключенные к регистрам команд, оценочных функций, состояний и адреса, блоки приоритетов, управления, коммутации, сравнения и анализа координат и связи с ЭВМ, сумматоры модификаций координат, подключенные к блокам коммутации и унитарных кодов, блок коммутации унитарных кодов и логический блок 1.
Недостатки устройства состоят в его низкой точности и ограниченных функциональньгх возможностях.
Наиболее близкое к изобретению техническое решение - устройство для программного управления приводами, содержащее блок коррекции и последовательно соединенные блок управления, подключенный к реверсивным счетчикам и к преобразователям аналог-частота, блок заданий программы, блок памяти, подключенный к коммутатору, к блоку деления и к реверсивным счетчикам, первый Ьлок сравнения, блок задания скорости, подключенный к
блоку управления и к блоку памяти, второй блок сравнения, подключенный к блоку деления и к третьему блоку сравнения, и коммутатор, подключенный к преобразователям аналог-частота 2.
Недостатком этого устройства является низкая точность.
Цель изобретения - повышение точности устройства.
Поставленная цель достигается тем, что в устройстве другой выход блока задания скорости соединен с другим .входом коммутатора и с первым входом блока коррекции, второй вход которого подключен к
выходу второго блока сравнения, выход блока коррекции соединен с другим входом первого блока сравнения, а другие входы третьего блока сравнения подключены к выходам преобразователей аналог
частота и к другим входам реверсивных счетчиков.
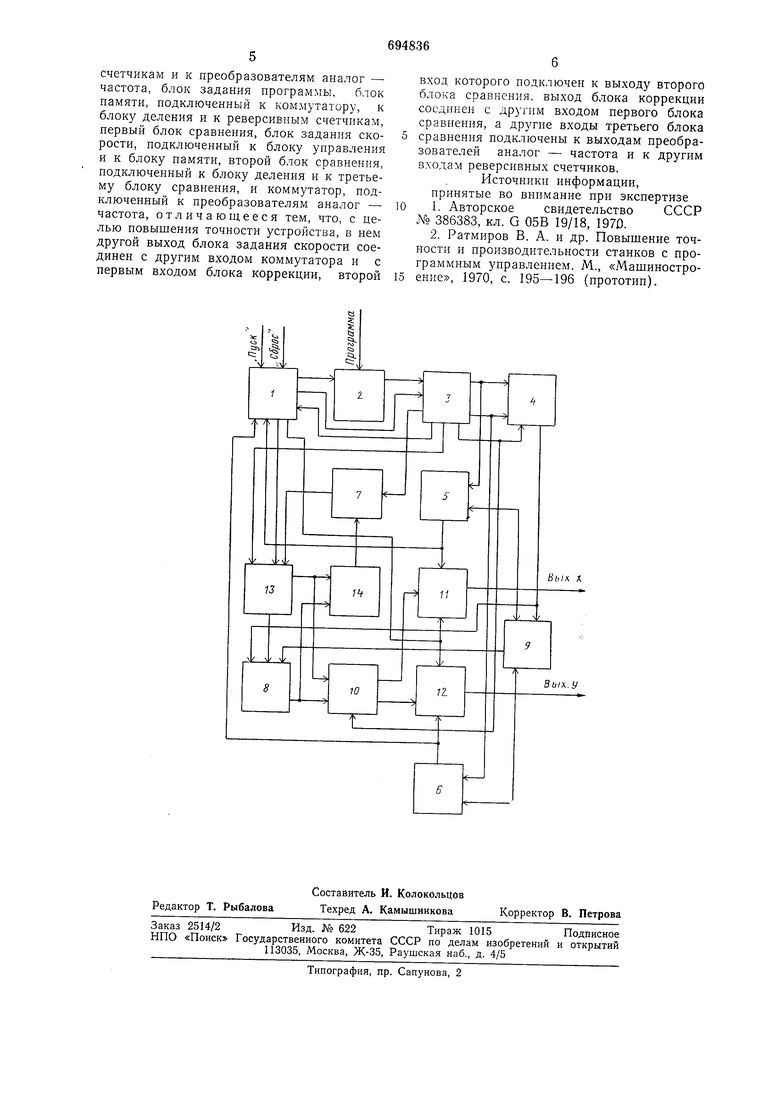
На чертеже показана функциональная схема устройства.
Устройство содержит блок 1 управления,
блок 2 задания программы, блок 3 памяти, блок 4 деления, реверсивные счетчики 5, 6, блоки 7-9 сравн ения, коммутатор 10, преобразователи аналог - частота 11, 12, блок 13 задания скбрости и блок 14 коррекции. Работает устройство следующим образом. По 1 оманде «Пуск блок 1 управления включает блок 2, который считывает информацию первого кадра программы и после преобразования передает в блок 3. Блок 1 выдает сигнал «Передача в блок 3, который передает информацию о величине перемещения по координатам в блок 4 и в счетчики 5 и 6 по координатам X и У, информацию о скорости перемещения в блок 7, информацию о режиме отработки кадра (разгон-торможение) в блок 13, информацию признака главной координаты в блок 4 и на коммутатор 10 переключения координат, который подключает блок 13 к преобразователю аналог - частота той координаты, по которой задано больщее перемещение, а блок 8 сравнения - к другому преобразователю аналог - частота. После сигнала «Передача с блока 1 поступает следующий сигнал «Ввод, и блок 2 вводит в блок 3 следующий кадр программы, который хранится в нем до конца отработки предыдущего кадра и выработки очередного сигнала «Передача. Блок 4 определяет коэффициент, соответствующий отношению величин перемещений по координатам и передает его в блок 8 для установки необходимого соотнощения аналоговых величин между блоком 13 задания скорости главной координаты и блоком 8 сравнения, а также передает в блок сравнения 9 расчеты величины и знака отклонения. По команде «Работа блока И, поступающей из блока 1 в блок 13, последний начинает изменять значение аналоговой величины на входе подключенного к нему преобразователя аналог - частота в соответствии с законом изменения скорости, заданным из блока 3. В соответствии с коэффициентом начинает изменяться значение аналогового сигнала на выходе блока 8, к которому подключен другой преобразователь аналог - частота. Одновременно с сигналом «Работа блока задания скорости на преобразователи аналог - частота И и 12 приходит из блока 1 сигнал «Работа, который разрешает работу этих блоков, а частота определяется значениями аналоговых величин на их входах и является выходной частотой устройства программного управления по координатам. Значение аналоговых величин изменяется в соответствии с заданным законом изменения скорости до тех пор, пока значение контурной скорости, поступающее из блока 14 коррекции в блок 7 не сравняется с заданным. После этого контурная скорость поддерживается постоянной за счет связи блока 7 с блоком 13. Импульсы с преобразователей аналог - частота 11 и 12 поступают в реверсивные счетчики 5 и 6 И в блок 9 для расчета величины и знака отклонения. В зависимости от отклонения действительной траектории от расчетной корректируют соотношение скоростей по координатам путем воздействия на блок 8 сравнения управляемого делителя. В установившемся режиме отработка кадра программы ведется до тех пор, пока счетчики 5 и 6 не сосчитают заданные от программы перемещения и передадут в блок управления сигналы об окончании отработки перемещения по координатам, совпадение которых является сигналом конца отработки кадра. На основании этого сигнала формируется сигнал «Передача в блок 3, по которому информация передается на отработку следующего кадра программы, и через время сигнал «Ввод на блок 2, который вводит в блок 3 очередной кадр. По этим командам все описанные выше операции повторяются, и так кадр за кадром происходит отработка программы. В конце отработки всей программы по сигналу «Передача из блока 1 блок 3 выдает команду «Конец программы, по которой блок 1 снимает сигнал «Работа блока задания скорости и сигнал «Работа. Работа устройства на этом заканчивается, и сигнал «Ввод на блок 2 не выдается. Работа устройства должна быть начата с подачи команды «Пуск. В любом месте программы отработку можно прекратить командой «Сброс, подаваемой вручную в блок 1, который прекращает работу блока 13 задания скорости главной координаты и преобразователей аналог - частота И и 12. Для остановки устройства в процессе отработки программы без потери информации (т. е. с возможностью дальнейшего продолжения работы с места останова) необходимо разорвать цепь «Работа от блока 1 управления с преобразователями аналог - частота, работа которых при этом запрещается при сохранении всей остальной информации в устройстве, и замыкание этой цепи возобновляет работу. Использование в металлообрабатывающей промышленности устройства программного управления с равномерной последоваельностью импульсов по координатам позволит повысить производительность за чет увеличения скоростей холостого хода, овысить надежность работы щагового ривода путем исключения рывков при изенении периодов между импульсами, а акже за счет поддержания контурной корости постоянной, улучшить условия бработки. Формула изобретения Устройство для программного управлеия приводами, содержащее блок коррекии и последовательно соединенные блок правления, подключенный к реверсивным
счетчикам и к преобразователям аналог - частота, блок задания программы, блок памяти, подключенный к коммутатору, к блоку деления и к реверсивным счетчикам, первый блок сравнения, блок задания скорости, подключенный к блоку управления и к блоку памяти, второй блок сравнения, подключенный к блоку деления и к третьему блоку сравнения, и коммутатор, подключенный к преобразователям аналог - частота, отличающееся тем, что, с целью повышения точности устройства, в нем другой выход блока задания скорости соединен с другим входом коммутатора и с первым входом блока коррекции, второй
вход которого подключен к выходу второго блока сравнения, выход блока коррекции соединен с другим входом первого блока сравнения, а другие входы третьего блока
сравнения подключены к выходам преобразователей аналог - частота и к другим входам реверсивных счетчиков.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 386383, кл. G 05В 19/18, 1970.
2. Ратмиров В. А. и др. Повышение точности и производительности станков с программным управлением. М., «Машиностроение, 1970, с. 195-196 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное задающее устройство | 1980 |
|
SU879560A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для программного управления промышленным роботом | 1980 |
|
SU894675A1 |
| Программное задающее устройство | 1979 |
|
SU903808A2 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство для программного управления | 1977 |
|
SU708306A1 |
| Устройство для автоматического контроля процесса сварки | 1984 |
|
SU1238921A1 |
| Устройство управления многокоординатным механизмом | 1981 |
|
SU1001011A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Программное задающее устройство для токарного станка с программным управлением | 1981 |
|
SU1012688A1 |
