Изобретение относится к области подъемно-транспортного оборудования и может быть использовано в угольной и горнорудной отраслях промышленности для групповой транспортировки канатов, в частности для навески и смены шахтных канатов на многоканатных подъемных установках со шкивами трения.
Наиболее близким техническим решением из известных является устройство для навески и смены канатов на многоканатной подъемной установке, содержащее раму, на которой смонтирован движитель канатов, и электропривод с передачей, выходной вал которой соединен с движителем, снабженным механизмом прижатия канатов, выполненным с футерованными эластичным материалом рабочими поверхностями, взаимодействующими с канатом 1.
Недостатком указанного устройства является сравнительно невысокая безопасность обусловленная отсутствием возможности регулирования натяжения канатов и контроля линейного перемещения последних при групповом транспортировании.
Целью изобретения является повышение безопасности путем обеспечения возможности регулирования натяжения канатов и контроля линейного перемещения последних при групповом транспортировании.
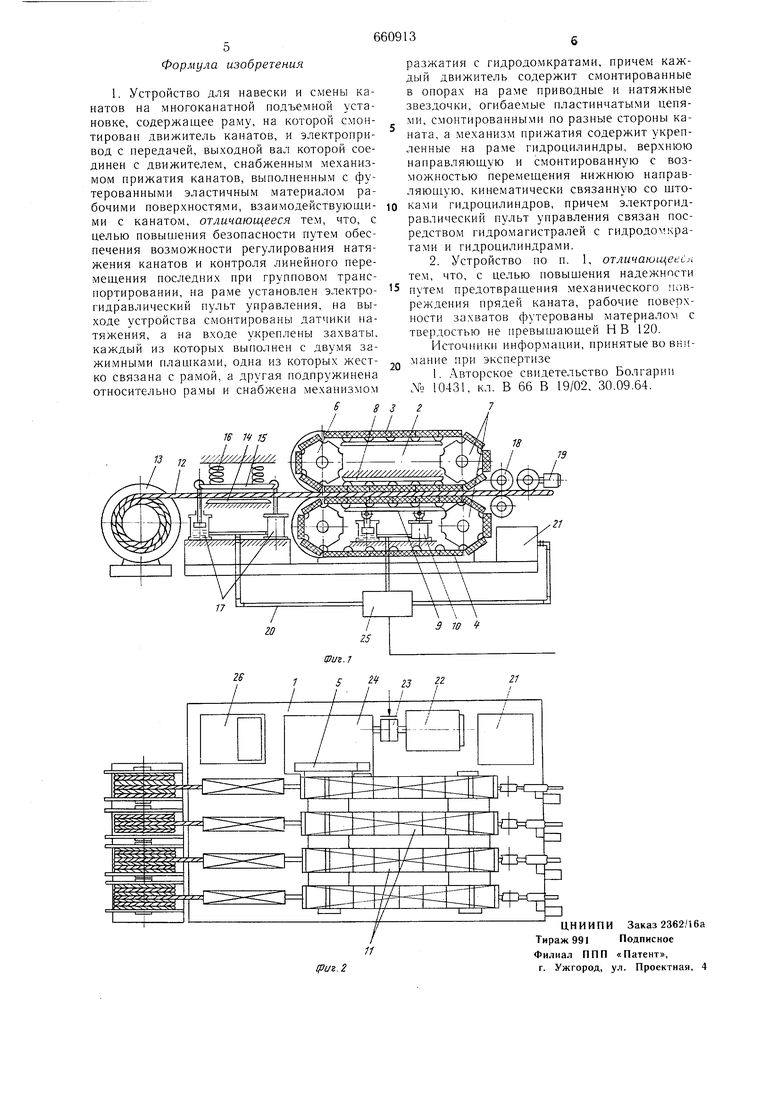
Указанная цель достигается благодаря тому, что на раме установлен электрогидравлический пульт управления, на выходе устройства смонтированы датчики натяжения, а на входе смонтированы захваты, каждый из которых выполнен с двумя зажимными плашками, одна из которых жестко связана с рамой, а другая подпружинена относительно рамы и снабжена механизмом разжатия с гидродомкратами, причем каждый движитель содержит смонтированные в опорах на раме приводные и натяжные звездочки, огибаемые пластинчатыми цепями, смонтированными по разные стороны каната, а механизм прижатия содержит укрепленные на раме гидроцилиндры, верхнюю направляющую и смонтированную с возможностью перемещения нижнюю направляющую, кинематически связанную со щтоками гидроцилиндров, причем электрогидравлический пульт управления связан посредством гидромагистралей с гидродомкратами и гидроцилиндрами. Кроме того, с целью повышения надежности путем предотвращения механического повреждения прядей каната, рабочие поверхности захватов футерованы материалом с твердостью не превышающей НВ 120. На фиг. 1 схематично изображен общий вид устройства сбоку; на фиг. 2 - то же, вид сверху. Устройство содержит раму 1 с опорными стойками 2, на которых размещены верхний 3 и нижний 4 ряд цепей, которые кинематически связаны через зубчатую передачу 5, при этом каждая из цепей размещена на приводной 6 и натяжной 7 звездочках и установлена в направляющих 8 и 9. Причем для верхнего ряда 3 цепей направляющие 8 выполнены неподвижными, а для нижнего ряда 4 цепей направляющие 9 подвижны и снабжены механизмом прижатия с гидроцилиндрами 10. Каждый ряд цепей 3 и 4 образует отдельный тракт 11 для каждого каната 12, уложенного па мотор-катушку 13. Между мотор-катушками 13 и цепями 3 и 4 на общей раме с последними установлены захваты канатов. Захваты выполнены в виде зажимных плашек 14, 15, между которыми размещен канат 12. Плашки 14 неподвижны, плащки 15, подвижны, причем подпружинены спиральными или тарельчатыми пружинами 16 и снабжены механизмом разжатия, содержащем, например, гидродомкраты 17. На каждом тракте при выходе канатов из устройства установлен направляющий аппарат 18 в виде роликов, а также датчики 19 линейного перемещения канатов и их натяжения. Гидросистема 20 устройства связана с маслостанцией 21, смонтированной на раме лебедки; управление гидросистемой, а также главным двигателем 22, рабочим тормозом 23 и приводом 24 осуществляется с электрогидравлического пульта 25 управления, размещенного в кабине 26 оператора. Работа устройства осуществляется следующим образом. Перед началом работ по навеске и смене щахтных канатов и сосудов устройство размещается на околоствольном дворе и крепится к специальному фундаменту. Дальнейщие операции проводятся в соответствии с проектом производства работ, который разрабатывается конкретно для данной шахты с учетом ее специфики. Например, требуется произвести первоначальную навеску четырех новых канатов 12 на многоканатную подъемную установку. Каждый канат 12 наматывается на свою мотор-катушку 13 и размещается соответствующим образом возле устройства. С пульта 25 управления включаются маслостанция 21, главный двигатель 22, привод 24, рабочий тормоз 23 растормаживается, подается давление в гидроцилиндры 17, при этом на каждом тракте 11 подвижные плашки 15 перемещаются, сжимая пружины 16. Канаты с мотор-катушек 13 пропускаются между разжаты.ми плашками 14 и 15 в пространство между цепями 3 и 4. С пульта 25 управления подается исполнительный сигнал, в связи с чем срабатывают электромагниты, и через гидравлические золотники и гидросистему 20 жидкость поступает в гидроцилиндры 10 на каждом тракте 11. При этом канаты взаимодействуют с футеровкой цепей 3 и 4, удерживаются и перемещаются фрикционными силами. На выходе из устройства канаты проходят через направляющий аппарат 18, причем с каждым из них взаимодействуют датчики линейного перемещения и натяжения канатов, которые также сблокированы с пультом 25 управления. Таким образом, канаты равномерно опускаются в ствол щахты, если же, например, натяжение в одном из четырех канатов снизилось и требуется его повысить, то с пульта 25 управления подается сигнал на зажим соответствующего каната, снимается давление с его гидродомкратов 17, пружины 16 вступают в работу, пере.мещают плашку 15 и нужный канат оказывается зажатым между плашками 14 и 15, при этом привод 24 ставится на «стоп, т. е. отключается главный двигатель 22 и затор.маживается тормоз 23. С пульта управления подается также, сигнал в прижимной механизм цепи тракта данного каната и сни.мается давление в соответствующих гидроцилиндрах 10. Один канат оказывается таким образо.м зажатым в захвате и свободным между цепями, остальные канаты остаются свободными каждый в своем захвате и зажатыми между цепями. При дальнейшей работе перемещаются все канаты кроме одного: длины канатов и их натяжения выравниваются. Затем устройство переводится на режим технологического «Стоп, гидроцилиндрами 10 поджимается направляющая 9 подтянутого каната, и последний зажимается между цепями 3 и 4 в своем тракте, этот же канат освобождается в своем захвате. Далее устройство включается в работу и уже все канаты синхронно с одинаковыми натяжениями и длинами опускаются в ствол щахты. Таким образом обеспечивается возможность регулирования длины и натяжения сразу нескольких канатов при их групповом перемещении. Помимо вышеизложенного захваты могут выполнять также функцию ловителей канатов. Так в случае экстренной остановки, т. е. в режиме аварийного «Стоп, при появлении опасного проскальзывания канатов срабатывают датчики 19, главный двигатель выключается, накладывается рабочий тормоз, срабатывают захваты канатов, подобно ловителю надежно удерживая их между зажимными плашками.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| УСТАНОВКА ДЛЯ ВЫТЯЖКИ КАНАТА | 1972 |
|
SU432254A1 |
| Перестановщик секций металлической опалубки | 1979 |
|
SU894201A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ МОНТАЖА-ДЕМОНТАЖА СЕКЦИЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1994 |
|
RU2064586C1 |
| СТЕНД ДЛЯ МОНТАЖА И ДЕМОНТАЖА ШИНЫ КОЛЕСА И ТЕЛЕЖКА ДЛЯ ПЕРЕДВИЖЕНИЯ КОЛЕСА | 2007 |
|
RU2340464C2 |
| Шахтная многоканатная подъемная установка | 1990 |
|
SU1729989A1 |
| Устройство для регулирования рабочих натяжений канатов многоканатной подъемной установки | 1980 |
|
SU956406A1 |
| Устройство для перекрепления горных выработок | 1985 |
|
SU1259021A1 |
| Самопередвижная приводная накопительная система | 2024 |
|
RU2820969C1 |
| Установка для тягово-динамических испытаний промышленных тракторов | 1988 |
|
SU1647335A1 |
