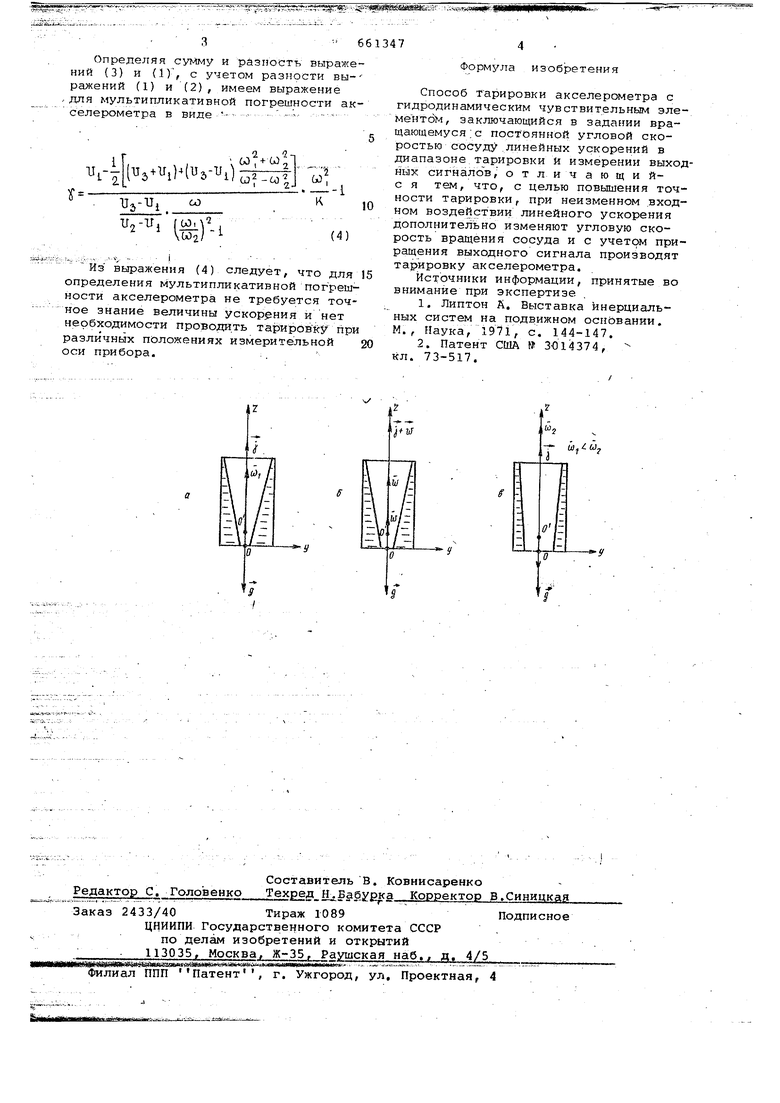
Изобретение относится к измерительной технике и-может быть использовано при испытаниях акселерометров с гидродинамическим чувствительнымэлементом. Известны способы испытания акселе рометров, заключаквдиеся в измерении двух выходных сигналов при положениях измерительной оси, отличающихся на 180 , неизменном и известном вход ном воздействии в виде силы тяжести 1 . Наиболее близким техническим реше нием является способ тарировки акселерометров, заключающийся в задании чувствительному элементу линейных ус корений в диапазоне тарировки и изме рении выходных сигналов 2 . Однако мультипликативные погрешности таких способов снижают точност тарировки акселерометра. Цель изобретения - повышение точности тарировки. Указанная цель-достигается тем, что при неизменном входном воздействии линейного ускорения дополнительно изменяют -угловую скорость вращения сосуда и с учетом приращения выходного сигнала производят тарировку акселерометра. При вращении сосуда с постоянной угловой скоростью выходной сигнал акселерометра равен К Tl(t+y)j + Air, (1) где К - коэффициент пропорциональности; (Oj- угловая скорость вращения сосуда г . .. - линейное ускорение У - мультипликативная погрешность акселерометра; ДИ - смещение нуля - аддитивная погрешность акселерометра. При входном воздействии, отличающемся от вышеуказанного случая на ве личину виброускорения W (положение б), величина которого известна, выходной сигнал акселерометра равен (() + uU При ином значении угловой скорости Wj, сосуда и входном сигнале j (положение в) выходной сигнал прибора имеет вид ifa li ifbAU (3)
я Определяя сумму и разность выраж ний (3) и (1), с учетом разности вы ражений (1) и (2), имеем выражение для мультипликативной погрешности а селерометра в виде - ,., .. .:. о о ГТ )() (J -со ( Wlf J uoa/ Из выражения (4) следует, что дл определения мультипликативной погреш ности акселерометра не требуется точ ное знание величины ускорения и нет необходимости проведать тарирОВку п различных положениях измерительной оси прибора.
661347 Формула изобретения Способ Тарировки акселерометра с гидродинамическим чувствительным элемёптдм, заключающийся в задании вращающемуся; с постЬянной угловой скоростью сосуду .линейных ускорений в диапазоне,тарировки и измерении выходных сигналов, отличающийс я тем, что, с целью повышения точности тарировки, при неизменном входНом воздействии линейного ускорения дополнительно изменяют угловую скорость вращения сосуда и с учетом приращения выходного сигнала производят тарировку акселерометра. Источники информации, принятые во внимание при экспертизе 1.Липтон А. Выставка йнерциальных систем на подвижном осн&вании. М,, Наука, 1971, с. 144-147. 2.Патент США № 3014374, -кл. 73-517.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки низкочастотных линейных акселерометров | 1987 |
|
SU1540494A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МУЛЬТИПЛИКАТИВНОЙ СОСТАВЛЯЮЩЕЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839836A1 |
| Способ определения коэффициентов калибровки интегрированного блока датчиков | 2017 |
|
RU2655053C1 |
| Способ определения мультипликативной составляющей погрешности компенсационного акселерометра | 1976 |
|
SU1839934A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК АКСЕЛЕРОМЕТРОВ НА ЦЕНТРИФУГЕ | 2001 |
|
RU2192016C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
| Способ градуировки линейных акселерометров | 1986 |
|
SU1345122A1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
г fW
w,w.
