(54) ИНТЕГРИРУЮЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки интегрирующего привода переменного тока | 1984 |
|
SU1302412A1 |
| Устройство для измерения вращающего момента асинхронного электродвигателя | 1977 |
|
SU750298A1 |
| Устройство для регулирования частоты вращения и крутящего момента асинхронного двигателя | 1982 |
|
SU1435164A3 |
| Асинхронный тахогенератор | 1982 |
|
SU1035739A1 |
| Способ настройки интегрирующегопРиВОдА пЕРЕМЕННОгО TOKA | 1978 |
|
SU800972A1 |
| Устройство для дистанционного регулирования скорости прессования | 1958 |
|
SU117775A1 |
| Устройство для измерения характеристик асинхронного тахогенератора | 1980 |
|
SU892365A1 |
| Автоматический ротационный вискозиметр | 1983 |
|
SU1099248A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
,. 1
Предлагаемый привод относится к области вычислительной техники и может быть использован в c eтнo-peшaюIциx устройствах: приборной автоматики
Известны интегрирующие приводы переменного тока, содержащие асинхронный тахогенератор, масштабный трансформатор, вращающийся трансформатор, блок сравнения, усилитель, электродвигатель и источник питания 1.
Точность известных интегрирующих приводов определяется, главным образом, величинами скоростных, температурных и частотных погрешностей примененного асинхронного тахогенератора. В связи с этим для повышения точности интегрирующих приводов применяют прецизионные асинхронные тахогенераторы, стабилизируют частоту источника питания интегрирующего привода и поддерживают на, определенном уровне температуру нагрева асинхронного тахогенератора.
Из известных устройств наиболее близким по технической сущности к изобретению
является интегрирующий привод, содержащий последовательно соединенные источник питания, масштабирующий блок, вращающийся трансформатор, и последовательно соединенные блок сравнения, усилитель и исполнительный двигатель, выход которого через асинхронный тахогенератор соединен с первым входом блока сравнения, вторые входы асинхронного тахогенератора исполнительного двигателя и вход масштабирующего блока соединены с соответствующими выводами источника питания 2.
Недостатком такого привода являются его низкие точностные характеристики.
Целью изобретения является повышение 5 точности работы привода.
Поставленная цель достигается тем, что в предложенном приводе установлена модель асинхронного тахогенератора, вход которой соединен с выходом вращающегося трансформатора, а выход - со,вторым входом блока сравнений.
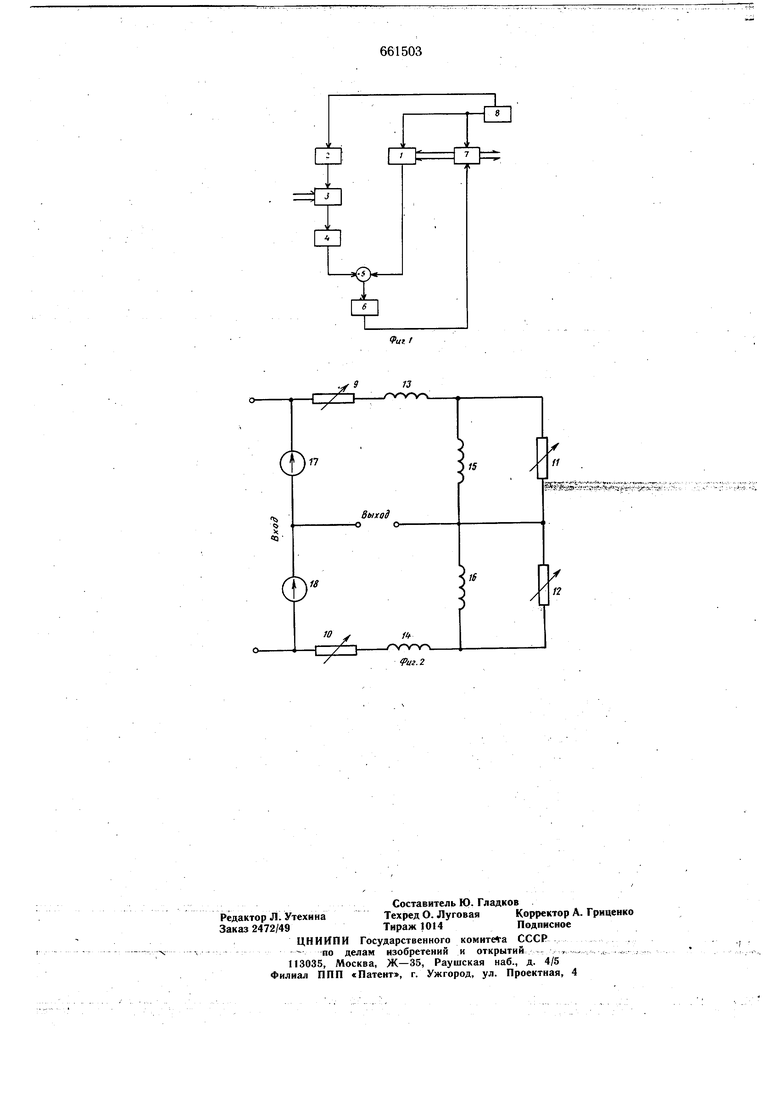
На фиг. 1 приведена структурная схема привода; на фиг. 2 - электрическая схема модели асинхронного тахогенератора.
Устройство содержит асинхронный тахогенератор 1, масштабирующий блок. 2, вращающийся трансформатор 3, модель асинхронного тахогенератора 4, блок сравнения 5 усилитель 6, исполнительный двигатель 7 и источник питания 8.
Модель асинхронного тахогенератора включает резисторы 9-12, индуктивные сопротивления 13-16, и источники ЭДС 17, 18.
В качестве источника питания 8 может быть использован двухфазный генератор или статический преобразователь трехфазного напряжения в двухфазное. Напряжения на выходах источника питания 8 сдвинуть одно относительно другого на 90°.
Модель асинхронного тахогенератора 4 построена по схеме замещения асинхронного тахогенератора 1. Величина сопротивления резисторов 9 и 10 выбрана в зависимости от активного сопротивления входной обмотки тахогенератора 1, величина сопротивления резисторов 11, 12 в зависимости от активного сопротивления ротора тахогенератора 1, приведенного к его входной обмотке и от относительной скорости вращения ротора. Величины индуктивных сопротивлений 13 и 14 выбраны в зависимости от индуктивного сопротивления входной обмоткй тахогенератора 1, а величины индуктивных сопротивлений 15, 16 - в зависимости от индуктивного сопротивления намагничивающего контура тахогенератора 1.
Привод работает следующим образом:
Входной сигнал X преобразуется трансформатором 3 в напряжение переменного тока, которое поступает на вход модели тахогенератора 4, выполняющей три функции: фазирование и масщтабирование напряжения интегрируемой функции и формирование погрещностей, адекватных погрешностям тахогенератора 1. Поскольку напряжение на выходе трансформатора 3 обычно близко, по фазе с напряжением питания, то модель тахогенератора 4 обеспечивает приближенно совпадение по фазе выходного напряжения привода с напряжением тахогенератора 1. Точное фазирование сравниваемых напряжений достигается изменением величины сопротивления резисторов 9, 10 модели тахогенератора 4. Масштабирование задающего напряжения осуществляется грубо изменением сопротивлений резисторов 11, 12 модели тахогенератора 4 (путем соответствующего выбора относительной ско661503
рости вращения ротора) и точно масштабирующим блоком 2.
Выходные напряжения тахогенератора 1 и модели тахогенератора 4 поступают на входы блока сравнения 5. Выходное напряжение блока сравнения 5 поступает на вход усилителя 6, с выхода которого напряжение поступает на обмотку управления исполнительного двигателя 7, вращающего ротор, тахогенератора I таким образом, чтобы выходной сигнал блока сравнения 5 стремился к нулю. При этом угол поворота ротора двигателя 7 пропорционален временному интегралу от интегрируемой функции X.
Предлагаемый интегрирующий привод благодаря введению в него модели асинхронного тахогенератора существенно превосходит известные приводы по точности (примерно в 10 раз) и по диапазону интегрирования (в 1,5-2 раза), так как в нем одновременно установлены (или значительно уменьщены) температурные и частотные погрещности без ухудшения энергетических показателей или применения известных сложных конструктивно-технологических мер, связанных с компенсацией температурных и частотных погрещностей.
Формула изобретения
Интегрирующий привод, содержащий последовательно соединенные масштабируюший блок и вращающийся трансформатор, последовательно соединенные блок сравнения, усилитель и исполнительный двигатель, выход которого через асинхронный тахогенератор соединен с первым входом блока сравнения, вторые входы асинхронного тахогенератора, исполнительного двигателя и вход масштабирующего блока соединены с соответствующими выводами источника питания, отличающийся тем, что с целью повышения точности работы привода, в нем установлена модель асинхронного тахогенератора, вход которой соединен с выходом вращаюгцегося трансформатора, а выход - со вторым входом блока сравнения.
Источники информации, принятые во внимание при экспертизе
n
t
s
/5
Выход -оo16
n
